含有磁滯逆的狀態反饋非線性系統動態面控制
2015-05-30 19:30:25吳金龍
科技資訊 2015年28期
吳金龍
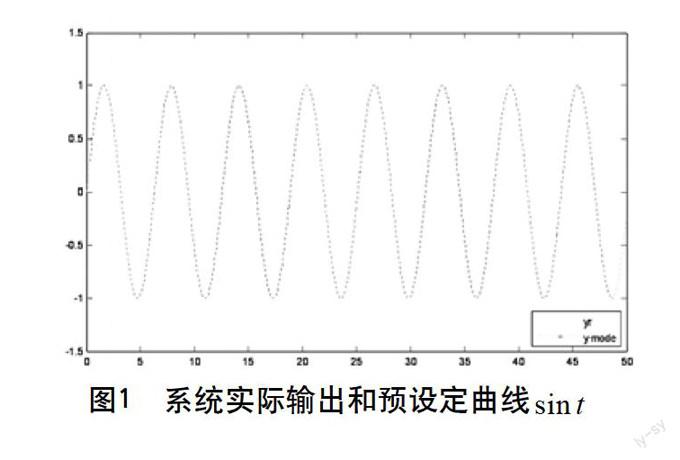
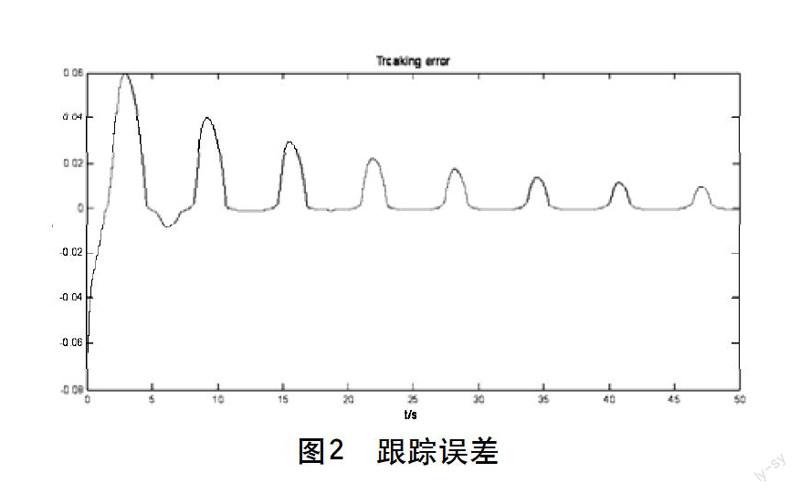
摘要:針對一類帶有Revised Prandtl-Ishlinskii(RPI)磁滯的嚴格狀態反饋非線性模型,通過引入磁滯逆模型抵消輸入中的磁滯輸入項,提出了一種改進的魯棒自適應動態面控制方案。本方案解決了采用反推法時出現的“微分膨脹”問題,保證閉環非線性系統所有信號半局一致有界。仿真結果證明了控制律的有效性。
關鍵詞:磁滯逆;動態面控制; 性能
中圖分類號:TP13 文獻標識碼:A 文章編號:1672-3791(2015)10(a)-0000-00
0引言
磁滯是一種常見的非線性現象,很多智能材料制作的裝置中都會出現,比如壓電陶瓷驅動器[1]。磁滯現象的存在制約了閉環控制系統的精確度和穩定性,容易產生震蕩[2]。由于現代工業大規模采用以智能材料為核心部件制作的裝備,因此系統中的非線性磁滯現象受到國內外學術界的廣泛關注[3]。
反推法在非線性系統中常被用來設計控制器。但是反推法在設計高階系統控制器時會出現“微分膨脹”問題,并且給計算機帶來極大的計算量。
在處理磁滯問題時,有魯棒自適應[4]和建立磁滯逆模型[5, 6]兩種方法,由于建立磁滯逆模型對于模型的精確性要求較高并且推導復雜,所以大部分學者采用魯棒自適應方法來克服系統中的磁滯現象,本文采用構造磁滯逆的方法來解決非線性系統的控制問題。通過設計合適的Lyapunov函數,保證閉環系統所有信號一致有界。仿真結果表明所設計的控制器具有較好的跟蹤性能。
參考文獻:
[1]谷國迎, "壓電陶瓷驅動微位移平臺的磁滯補償控制理論和方法研究," 博士, 上海交通大學, 2012.
[2]Z. Xiuyu, W. Jing, and L. Cuiping, "Robust adaptive dynamic surface control for metal cutting system with hysteresis input," in Intelligent Control and Automation (WCICA), 2014 11th World Congress on, 2014, pp. 1534-1539.
[3]曹淑瑛, "超磁致伸縮致動器的磁滯非線性動態模型與控制技術," 博士, 河北工業大學, 2004.
[4]賈濤, 劉軍, and 錢富才, "一類非線性時滯系統的自適應模糊動態面控制," 自動化學報, pp. 83-91, 2011.
[5]L. Sining, S. Chun-Yi, and L. Zhi, "Robust Adaptive Inverse Control of a Class of Nonlinear Systems With Prandtl-Ishlinskii Hysteresis Model," Automatic Control, IEEE Transactions on, vol. 59, pp. 2170-2175, 2014.
[6]L. Sining, S. Xinjun, L. Zhi, and S. Chun-Yi, "Inverse control of a class of nonlinear systems with modified generalized Prandtl-Ishlinskii hysteresis," in IECON 2012 - 38th Annual Conference on IEEE Industrial Electronics Society, 2012, pp. 2319-2324.