旱田移栽機機械手自動喂苗系統
2015-05-30 07:12:32陳志超馬國超唐鈺璇朱俊華果莉
科技創新導報 2015年35期
陳志超 馬國超 唐鈺璇 朱俊華 果莉


摘 要:旱田移栽機機械手自動喂苗系統主要由育秧盤傳送帶,機械手,MSP430單片機,電動機等組成。其在當前半自動移栽機的基礎上融入了電子技術,走機電一體化的路線,研究和開發全自動移栽機。該系統采用了可伸縮并有拾取功能的機械手和卡位式輪回傳送帶,并用微控制器MSP430對其進行反饋控制,使該系統能夠準確拾取秧苗,及時對移栽機進行“喂”苗,同時避免了育秧盤下滑或者遮擋住了旱田秧苗移栽機的入苗口而造成的機械手不能正常“喂”苗的情況,保證了秧苗的成活率。該研究對促進我國農業自動化水平的進展,保障我國農村種植行業持續發展有重要意義。
關鍵詞:機械手 全自動 喂苗 成活率
中圖分類號:S223.9 文獻標識碼:A 文章編號:1674-098X(2015)12(b)-0137-02
我國是農業大國,隨著農業現代化發展,耕作機械行業為我國種植業發展提供了大量的機具裝備。新型耕種機械作為農業實用技術的載體,有力地促進了農業耕種新技術的發展,旱地移栽機就是其中一種。旱地移栽機取代了手工種植,減少種植的時間,提高了工作效率。現階段研制和使用多為半自動移栽機,每臺機械需2~3名喂苗人員,人工喂苗速度有限,且作業效率低,不適合短時間內完成大面積移栽,不符合當前我國農村勞動力缺乏的現狀。勞動強度大、移栽速度慢和勞動力緊張是半自動移栽機較為突出的問題。為了解決這嚴重的問題,以促進我國農業自動化水平的進展,該系統研究和開發全自動移栽機,提高勞動效率,提高育苗的成活率。
1 系統總體設計
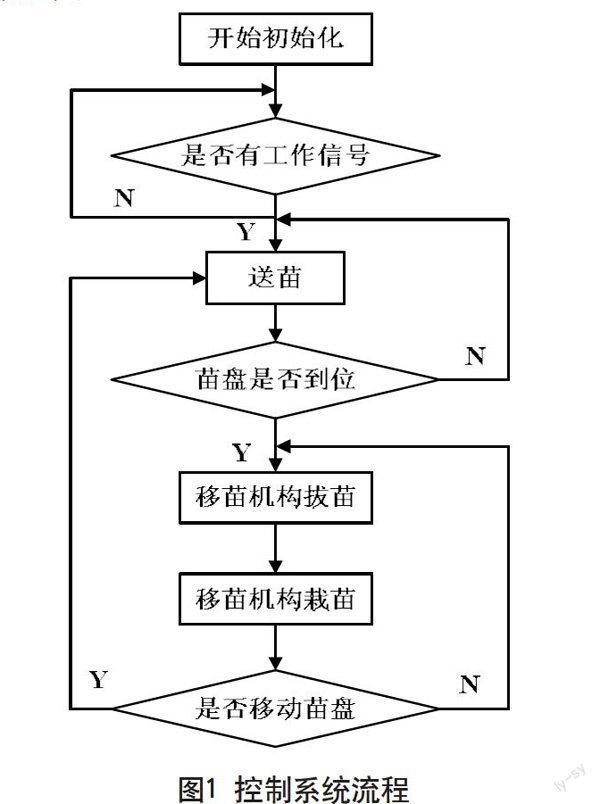
系統由機械部分和控制部分構成。其中機械部分由育秧盤傳送帶、機械手等組成。育秧盤傳送帶將育秧盤準確地送到指定位置供機械手進行操作。機械手自動定位育秧盤的位置,將盤中的秧苗拾取并送入秧苗入苗口。控制部分由單片機、觸力傳感器、交流伺服電機等組成。單片機負責處理整個系統采集到的信號,并按照預置的指令控制系統內其他部分進行相應的動作。觸力傳感器監測機械手是否拾取到秧苗并將信號反饋回單片機。直流電動機帶動育秧盤循環滾動進行送苗工作。圖1為系統流程圖。
2 系統硬件設計
2.1 機械部分硬件設計
育秧盤是栽苗機必不可少的一部分,而帶動育秧盤的傳送帶則承擔著連續不斷的運送任務。傳送帶設備選擇具有牽引件的傳送帶,該設備的結構特點是:被運送物料裝在與牽引件連結在一起的承載構件內,或直接裝在牽引件(如傳送帶)上,牽引件繞過各滾筒或鏈輪首尾相連,形成包括運送物料的有載分支和不運送物料的無載分支的閉合環路,利用牽引件的連續運動輸送物料。其結構特點十分符合栽苗機所需的物理結構。其運行可靠、動力消耗低、適應性強且十分靈活。傳送帶采用卡位式輪回傳送帶,能有效的保證機械手準確拾取秧苗,同時也防止了育秧盤下滑或者遮擋住了栽苗機的入苗口而造成的機械手不能正常喂苗。
該系統采用4自由度機械手進行工作。在該系統中,采用平面固定機構,配合軸承進行緩沖。機械手的金屬結構支架采用硬鋁合金制成,該材料重量輕、強度高,完全能夠適應栽苗時機械手的快速移動。在機械臂的重要受力關節,采用大扭力的金屬齒輪數字舵機。該數字舵機響應快、扭力大、噪音小。故此機械手可以勝任各種取苗以及喂苗動作。
2.2 控制部分硬件設計
在該系統中,作為控制器的單片機負責接收系統中觸力傳感器的信息,并控制機械手臂進行相應的動作。該系統選用MSP430單片機,它是一種超低功耗、高性能16位單片機。具有強大的處理能力、集成度高、可靠性強,具有極高的性價比[1]。
觸力傳感器鑲嵌在機械手上,其負責檢測機械手是否抓取到秧苗和抓取秧苗的力度并將信號反饋至單片機,從而單片機對機械手抓取的力度進行控制。該系統選用的為FS系列觸力傳感器,該傳感器內部的離子注入的壓敏電阻受壓彎曲時阻值發生變化,并正比于所施加的觸力,通過不銹鋼插桿直接作用于傳感器內部的硅敏感芯片;傳感器內置惠斯頓電橋,如圖2所示,通過橋路電阻阻值正比與觸力大小,從而檢測橋路各電阻的變化后就產生對應的mV輸出信號;從而其能夠提供精確、可靠的觸力傳感功能,有效的避免了機械手抓取時對秧苗的損害。
電機采用一體化閉環交流伺服驅動電機。由于電機帶動傳送帶以及育秧盤轉動并且需要與機械手進行配合,所以對于電機的動態響應有很高的要求。采用帶編碼器的電機,使其具有伺服電機的閉環特性,從而實現精確控制。單片機對其進行控制,適合應用于短距離快速啟停的場合,使得系統具有極高動態響應,滿足了和機械手進行配合的要求。
3 軟件設計
3.1 PID算法
PID是比例(P)、積分(I)、微分(D)控制算法。比例,反應系統的基本(當前)偏差e(t),系數大,可以加快調節,減小誤差,但過大的比例使系統穩定性下降,甚至造成系統不穩定。
積分,反應系統的累計偏差,使系統消除穩態誤差,提高無差度,因為有誤差,積分調節就進行,直至無誤差;微分,反映系統偏差信號的變化率e(t)-e(t-1),具有預見性,能預見偏差變化的趨勢,產生超前的控制作用,在偏差還沒有形成之前,已被微分調節作用消除,因此可以改善系統的動態性能[2]。PID控制原理圖如圖3所示。
該系統采用比例微分控制規律(PD)控制,微分具有超前作用,對于具有容量滯后的控制通道,引入微分參與控制,在微分項設置得當的情況下,對于提高系統的動態性能指標,有著顯著效果。因此,對于控制通道的時間常數或容量滯后較大的場合,為了提高系統的穩定性,減小動態偏差等可選用比例微分控制規律。
式中KP為比例放大系數;TD為微分時間。
通過傳感器采樣機械手的位置,與預定的位置比較得出偏差e(t),通過比例和微分調節PWM,使得機械手達到預期角度。通過多次實驗,可以得出適合的KP和TD值,機械手準確地拾取到秧苗并放入喂入器。
4 結語
旱田移栽機機械手自動喂苗系統是一種運動平穩、結構簡單、制造成本低廉全自動旱田移栽機。它的技術指標能夠達到目前國內先進水平,并且在保證技術指標及選種質量的前提下,傳送帶不僅能夠將秧苗往下傳送,而且能夠將其往左或往右傳送,提高了該系統拔苗和喂苗的準確度,保證了秧苗成活率。此外,該系統體積小,成本低,有利于產品使用以及推廣。旱田移栽機機械手自動喂苗系統實現了旱田移栽機的自動化,提高了耕種的效率,大大的緩解了農村勞動力短缺的問題。
參考文獻
[1]任保宏,徐克軍.MSP430單片機原理與應用[M].北京:電子工業出版社,2004.
[2]歐艷華.基于PID的現代加工生產機械臂控制系統設計[J].輕工科技,2015.
