龍門軸控制在西門子與海德漢數控系統中的應用比較
2015-05-30 22:07:52隋海倬
中國機械 2015年9期

摘要:本文主要基于西門子840D系統與海德漢iTNC530系統,對龍門軸在數控機床中的應用進行了詳細的比較分析。介紹了這兩種不同的數控系統應用到龍門軸的控制上的共性要求及不同的應用特點,以供參考。
關鍵詞:龍門軸;西門子840D;海德漢iTNC530
引言
當前,很多數控機床為了滿足某軸大力矩的要求,提高機床整體性能,從而應用了龍門軸的控制方法。對于數控系統而言,應用不同的數控系統來控制龍門軸會有不同技術特點,當然,同時也會有相同的技術約定。本文主要分別針對西門子840D系統和海德漢iTNC530系統,將這兩種系統應用于龍門結構進行介紹。
給出了龍門軸應用這兩種系統時共性的注意事項,同時也給出了這兩種系統不同的應用特點。這樣可以方便機床設計人員在設計之初對機床結構及數控系統的應用做出恰當的選擇,從而進一步提高機床的整體性能。
下面就以西門子840D系統和海德漢iTNC530系統為例,分別說明這兩種系統對于龍門軸的注意事項(共性)及調整方法:
1.西門子840D系統與海德漢iTNC530系統應用于龍門軸的共性與比較
1.1龍門軸簡介
龍門軸無論是西門子數控系統還是海德漢數控系統其英文均定義為“Gantry axis”,西門子多譯為“龍門軸”,而海德漢多譯為“同步軸”,本文以“龍門軸”作為介紹,配成一組的龍門軸可以同時移動,并用相同的軸符號進行加工編程,例如如圖1所示龍門結構機床的X軸或串聯工作臺。
圖1所示的是龍門結構的機床,其X軸由X1軸和X2軸組成龍門軸共同驅動完成。其中X1軸為主動軸,X2軸為從動軸,龍門軸都是由主動軸和從動軸組成的,主動軸和從動軸均有各自的位置環,只不過是從動軸的目標位置給定與主動軸是一樣的,數控系統會檢測由主動軸檢測量的實際坐標與從動軸測量到的實際坐標的差值,當差值過大時,系統報警,防止對數控機床造成硬件的損壞。
1.2基于西門子840D系統龍門軸的參數設置及應用特點
1.2.1需要設置的參數
以圖1所示的龍門機床為例,把X1軸與X2軸配置成龍門軸,需要設置的參數如下:首先需要設置通用參數MD19310,把其第0位置1,來激活龍門軸功能選項。
其次在軸參數MD37100 $MA_GANTRY_AXIS_TYPE中定義龍門軸組,在該參數中定義有哪些軸組成了龍門軸組,哪些軸為主動軸,哪些軸為從動軸,西門子840D系統一共可以定義8組龍門軸組,每組中可以定義1個主動軸,1個或2個從動軸。在本例中要把X1軸設置成為主動軸,則X1軸對應的MD37100 GANTRY_AXIS_TYPE[X1] = 1,要把X2軸設置成為從動軸,則X2軸對應的MD37100 GANTRY_AXIS_TYPE[X2] = 11,即同一組的從動軸參數在主動軸的參數基礎上加10。
接下來需要注意的是關于監控龍門軸組主動軸與從動軸位置偏差的參數,分別為:MD37110 $MA_GANTRY_POS_TOL_WARNING,MD37120 $MA_GANTRY_POS_TOL_ERROR,MD37130 $MA_GANTRY_POS_TOL_REF,通過這些參數,可以根據數控機床的實際情況,來設定不同范圍的報警值,恰當而及時的輸出報警,保護數控機床。其中MD37110與MD37120均是當機床的龍門軸組回零完成以后生效的,當主動軸與從動軸之間的實際位置差值超過這兩個參數中的數值時,數控系統會發出報警,同時NC會向PLC發出一個相應的接口信號,用戶可以根據自己的實際情況在PLC側進行處理。在這個過程中MD37110觸發報警時,系統不會取消龍門軸的同步關系,而當MD37120觸發報警時,系統會自動取消龍門軸的同步關系。而MD37130是針對機床的龍門軸完成回零之前的一個參數,回零之前,當主動軸與從動軸之間的實際位置差值超過這個參數中的數值時,數控系統會發出報警,并且取消龍門軸的同步關系,同時NC會向PLC發出一個相應的接口信號,同樣的,用戶可以根據自己的實際情況在PLC側進行處理。
1.2.2參考點的坐標調整
西門子840D系統龍門軸返回參考點的過程可以分為三步:
第一步:由龍門軸組中的主動軸先回參考點,從動軸不回,而是跟隨著主動軸進行移動,在這一步中可以通過主動軸的PLC接口信號DB31, ... DBX4.7/4.6來啟動主動軸回參考點。
第二步:只要主動軸已經完成回參考點,則從動軸會自動的回參考點,在這個過程中,主動軸與從動軸的關系會發生互換,即主動軸會跟隨從動軸移動,等到從動軸完成回參考點時,從動軸會將主動權交換給主動軸。
第三步:當龍門組中所有軸均完成回參考點時,它們必須用在主動軸中事先定義好的參數進行同步,在這一步中的操作順序會取決于回完參考點后主動軸與從動軸之間的差值,當差值小于MD37100時,龍門軸的同步過程會自動進行,當差值大于MD37100時,需要在PLC中激活“啟動同步”的信號,來進行龍門軸的同步,使主動軸與從動軸之間的差值接近于零。
1.2.3西門子系統應用龍門軸的注意事項
(1)龍門軸組中的從動軸一定不能是主軸。
(2)龍門軸組中的從動軸一定不能是concurrent POS軸(即PLC 軸)。
(3)龍門軸組中的從動軸一定不能被西門子動態描述中所尋址。
(4)一組龍門軸組中的從動軸不能成為另一類型耦合組中的從動軸。
(5)一組龍門軸組中的從動軸不能定義為另一軸組中的主動軸。
1.3基于海德漢iTNC530系統龍門軸的參數設置及應用特點
1.3.1需要設置的參數
對于海德漢iTNC530系統,激活龍門軸,龍門組中的每一個軸的跟隨誤差控制及速度前饋控制都是仍然有效的,建立龍門組,參數設置如下:
其中:在相應的軸參數MP850.x ,Input:后面輸入0,表示該軸為主動軸,如果輸入的是1到9的阿拉伯數字,則表示該軸為從動軸,而與其對應的主動軸的軸號就是輸入1到9的阿拉伯數字。
1.3.2參考點的坐標調整
MP860.x=0,輸入在從動軸的參數中,在這時你可以選擇機床啟動時的位置為龍門軸的同步參考點,主動軸與從動軸必須在同一位置,如果重新定義機床參考點,則只需要主動軸穿越參考點,在這種情況下,同步監控功能在機床啟動之后開始生效。
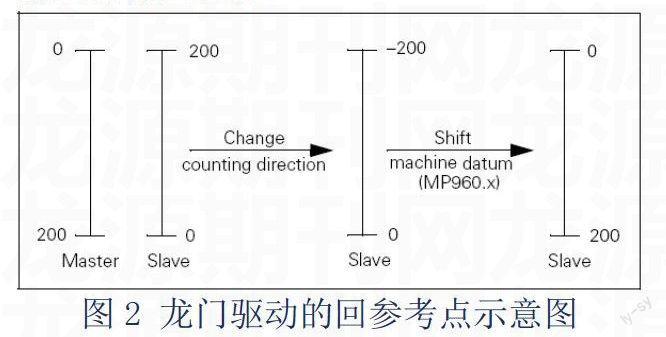
MP860.x=1,同樣輸入到從動軸的參數中,在這時你可以選擇穿越參考點之后的坐標值為龍門軸的同步參考點,在穿越參考點之后,主動軸與從動軸必須定位同一個位置。默認的設置可以通過參數MP960.x(機床坐標值偏置)進行修改,但在修改MP960.x之前,需要設置MP860.x=0,這樣一來,在主動軸與從動軸之間將不會產生補償運動。在主動軸與從動軸均回完參考點后,軸方向上的偏移將會被修正,只有在這是,龍門軸的監控功能才會被激活,在未回參考點之前,龍門軸的監控功能是失效的。
具體如圖2所示的例子所示:(該龍門軸分別安裝了位置編碼器,并且從動軸的位置編碼器與主動軸的位置編碼器是鏡像反裝的。)
1.3.3海德漢系統應用龍門軸的注意事項
(1)在MP1350.x中,主動軸與從動軸必須設置相同的回參考點的方式。
(2)在穿越參考點之后,從動軸同步補償的速度應該輸到MP1330.x中。
(3)在MP1340.x中,設置的是主動軸與從動軸回參考點的順序,主動軸必須先于從動軸。
(4)同步補償的動作不會被“NC停止”而中斷,機床緊急停止除外。
(5)如果主動軸已經完成參考點的穿越,這時出現了“NC停止”或機床緊急停止,但是從動軸還沒有完成參考點的穿越,這時從動軸只能通過面板上的方向鍵來完成參考點的穿越。
2.結束語
目前基于西門子840D系統和海德漢iTNC530系統的龍門軸控制方式,已經在多家公司的多款數控機床上得到應用,并且控制效果良好,本文分別基于西門子840D系統及海德漢iTNC530系統,給出了龍門軸應用這兩種系統時共性的注意事項及不同的應用特點,以供大家參考。
參考文獻:
[1] Siemens DOConCD 2010
[2] Heidenhain Technical_Manual_iTNC530_en, 2007.
[3] BA_HMIDEVICE_MobilePanel177_chs.Siemens, 2005.
[4]SIMODRIVE611 digital/SINUMERIK 840D/810D/Drive Functions/Function Manual.Siemens, 2009.
[5] Automatic Spindle Exchange G30. CyTec Zylindertechnik, 2009
作者簡介:隋海倬(1981-),男,碩士,工程師,講師,現任職于杭州技師學院,主要從事數控機床電氣方面的教學工作。
