基于CAN網絡電機實時監控系統的設計
2015-05-30 03:18:50劉小兵
電氣開關 2015年5期
劉小兵
(湖南汽車工程職業學院,株洲 湖南 412001)
1 引言
隨著生產的不斷擴大,現代化工廠使用的電機也越來越多,而且電機的工作過程序列化,如遇某電機出現故障就會將工廠的生產秩序打亂,造成生產混亂,嚴重時還會出現人員傷亡事故。因此設計一種高效可靠的全局電機控制系統勢在必行。現工廠里一般采用的電機監控網絡有RS485、RS232及USB組網,它們都存在不足之處,例如RS232傳輸距離近、抗干擾能力差,RS485只有主從發送沒有錯誤糾正機能、可靠性能差,USB所帶電機數目少等。本文設計的基于CAN總線組網的電機實時監控系統就能很好的克服這些不足,它的可靠性能高、實時性強以及組網靈活等優點。
2 系統總體結構
LPC2119是系統的核心由部分,它取樣電機的運行相關數據,對數據進行分析。將采集到的電機運行數據通過CAN總線傳送到監控中心,使監控中心能實時掌握電機的運行狀態,監控中心也可以通過CAN總線傳遞控制信息,實現雙向交流信息。除了監控中心與控制裝置間進行信息傳遞外,控制裝置之間也可以進行信息交換,這有利于生產過程中控制各節點電機的運行速度,達到全局諧調運轉。電流信號采集主要是對電機的運行電流大小取樣,判斷電機是否有短路情況發生。電機測速電路主要取樣電機的運轉速度,并通過逆變脈沖輸出電路來調節電機的轉速,達到電路運轉速度的可調目的。
3 主要電路模塊介紹
LPC2119微處理器自身帶有CAN控制器、AD轉換和PWM脈沖調節電路,所以在電路使用上合理分配,充分利用LPC2119的自身資源達到節省電路成本目標,下面我們將幾個主要的電路作介紹。
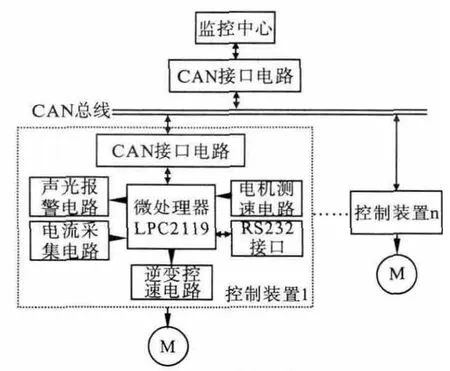
圖1 系統結構圖
3.1 電流采樣電路模塊
在電流信號采集電路用電流互感器對電機中流入的電路進行取樣,取樣的信號送到圖2中的IN端進行電平轉換,成為適合 LPC2119的輸入信號,再從LPC2119的AD端口輸入。
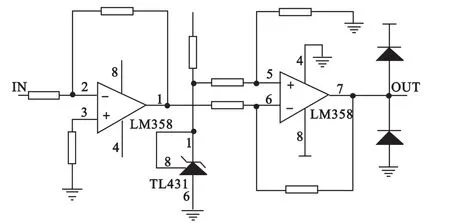
圖2 電流信息處理電路
3.2 CAN接口電路模塊
微處理LPC2119中自身帶有CAN總線控制模塊,CAN數據控制都由LPC2119內部完成,LPC2119的P0.23和P0.24是CAN輸入輸出端。外接電路主要是6N137和82C250兩集成電路,其中6N137進行光電路隔離,接高電路的抗干擾性能。82C250完成CAN數據的收發。
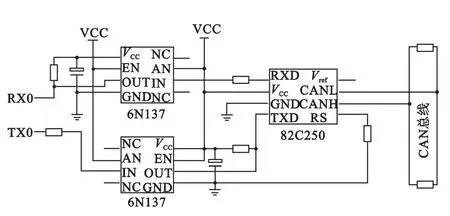
圖3 CAN接口電路
3.3 電機測速電路模塊
電機在運轉過程中通過霍爾元件對電機速度進行取樣,在電機的旋轉軸部件上加一個磁性物體,當磁性物體經過霍爾元件時,霍爾元件就會產生一個電信號,再通過電路的放大與整形就可以得到一個脈沖信號,經過軟件對脈沖的周期進行測試就可以得到電機的轉速。
3.4 逆變控速電路模塊
LPC2119從PWM引腳產生調寬脈沖經過SN74LVC4245轉換送到電機控制電路控制電機轉速,PWM輸出不同的脈沖寬度就可以控制電機的不同轉速,具體電路如圖4所示。
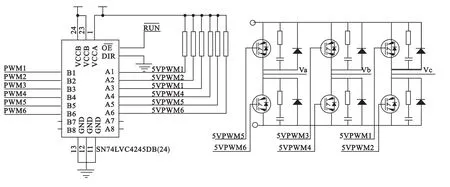
圖4 逆變控速電路
4 系統軟件設計
軟件開發以uC/OS-II為平臺開發,它的源代碼公開、基于優先級運行的實時操作系統,電機實時監控系統的流程如圖5所示。
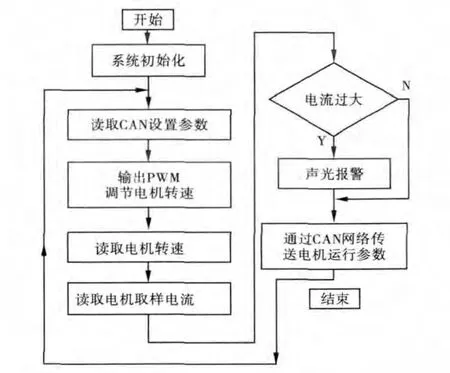
圖5 系統流程圖
5 結速語
本系統由LPC2119為核心控制器件,自身帶有CAN控制模塊使設計電路簡單實用,而CAN總線在工廠里組網能提高系統的抗干擾能力,使系統工作穩定高效,網絡傳輸速度快能及時快速的知道電機運行情況,預防電機事故發生。并通過CAN總線對各電機進行參數設計,節省企業的物力財力,該系統的應用前景非常廣泛。
[1]張培仁,杜洪亮.CAN現場總線監控系統原理和應用設計技術[M].合肥:中國科學技術大學出版社,2011.06.
[2]李真花,崔健.CAN總線輕松入門勾實踐[M].北京:北京航空航天大學出版社,2011.01.
[3]來清民.手把手教你學CAN總線[M].北京:北京航空航大大學出版社,2010.09.
[4]劉濤,王宗義,孔慶磊.基于CAN總線的多電機協調運動控制系統研究[J].機床與液壓,2010,38(3):75-77.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
