越野車(chē)輛機(jī)動(dòng)性研究
2015-05-16 05:38:02韓愈孟廣偉黃朝勝門(mén)玉琢
振動(dòng)與沖擊 2015年2期
關(guān)鍵詞:振動(dòng)
韓愈,孟廣偉,黃朝勝,門(mén)玉琢
(1.吉林大學(xué)機(jī)械科學(xué)與工程學(xué)院長(zhǎng)春 130025;2.中國(guó)第一汽車(chē)股份有限公司技術(shù)中心,長(zhǎng)春 130011; 3.長(zhǎng)春工程學(xué)院機(jī)電工程學(xué)院長(zhǎng)春 130012)
越野車(chē)輛機(jī)動(dòng)性研究
韓愈1,2,孟廣偉1,黃朝勝2,門(mén)玉琢3
(1.吉林大學(xué)機(jī)械科學(xué)與工程學(xué)院長(zhǎng)春 130025;2.中國(guó)第一汽車(chē)股份有限公司技術(shù)中心,長(zhǎng)春 130011; 3.長(zhǎng)春工程學(xué)院機(jī)電工程學(xué)院長(zhǎng)春 130012)
為研究越野車(chē)輛行駛在不平路段機(jī)動(dòng)性問(wèn)題,通過(guò)偏頻試驗(yàn)識(shí)別車(chē)輛部分特征參數(shù),測(cè)量試驗(yàn)車(chē)輛懸架位移,計(jì)算行駛路段路面不平度,監(jiān)測(cè)駕駛員座椅Z加速度在不平試驗(yàn)路段時(shí)序信號(hào),據(jù)人體疲勞特性計(jì)算人體吸入功率,并建立“人體-車(chē)身-車(chē)輪”三自由度振動(dòng)模型;用傅里葉逆變換生成不平路段的時(shí)序信號(hào)作為仿真輸入,利用Simulink仿真試驗(yàn)車(chē)輛駕駛員座椅Z向加速度在不平路段的時(shí)序信號(hào);提出人體吸入功率為6 W時(shí)對(duì)應(yīng)的車(chē)速作為評(píng)判越野車(chē)在不平路段的機(jī)動(dòng)性能。
車(chē)輛機(jī)動(dòng)性;路面不平度;偏頻試驗(yàn);動(dòng)力學(xué)仿真
越野車(chē)輛在不平路面上行駛時(shí),振動(dòng)通過(guò)輪胎、懸架及車(chē)身傳遞至駕駛員,振幅隨車(chē)速增加而增加,最終因振動(dòng)影響使駕駛員不能正常駕駛。國(guó)內(nèi)外對(duì)車(chē)輛平順性進(jìn)行過(guò)大量試驗(yàn)、研究,但較少將平順性作為軍用越野車(chē)輛機(jī)動(dòng)性評(píng)價(jià)指標(biāo)[1-3]。
本文以人體吸入功率為評(píng)價(jià)指標(biāo),對(duì)UNIMOG越野車(chē)的機(jī)動(dòng)性能進(jìn)行測(cè)量評(píng)價(jià),并進(jìn)行仿真研究。
1 車(chē)輛模型
為一輛越野車(chē)(UNIMOG-U4000)安裝加速度、位移、車(chē)速儀等傳感器。通過(guò)偏頻試驗(yàn)測(cè)量識(shí)別車(chē)輛輪胎、懸架、座椅主要參數(shù)。對(duì)某汽車(chē)試驗(yàn)場(chǎng)不平路段進(jìn)行路面不平度測(cè)量計(jì)算。據(jù)文獻(xiàn)[2],人體吸入功率為6 W時(shí)對(duì)應(yīng)車(chē)速作為越野車(chē)輛不平路段的機(jī)動(dòng)性能評(píng)價(jià)指標(biāo)。建立車(chē)輛振動(dòng)模型,利用Matlab軟件Simulink模塊對(duì)車(chē)輛在不平路段的人體吸入功率進(jìn)行仿真計(jì)算,流程見(jiàn)圖1。
車(chē)輛振動(dòng)簡(jiǎn)化模型[4]為:前后懸掛系統(tǒng)的垂直振動(dòng)是獨(dú)立的;車(chē)輛各彈性元件剛度均為位移的線性函數(shù);各減震器阻尼均為相對(duì)速度的線性函數(shù)。將人體、座椅部分質(zhì)量簡(jiǎn)化為剛性質(zhì)量ms,與座椅彈性、阻尼元件構(gòu)成單自由度子系統(tǒng),與車(chē)身-車(chē)輪構(gòu)成人體-車(chē)身-車(chē)輪三自由度振動(dòng)系統(tǒng),見(jiàn)圖2。

圖1 吸入功率計(jì)算流程框圖Fig.1 Absorbed power calculation flow diagram
忽略人體質(zhì)量的慣性力msp··對(duì)車(chē)身質(zhì)量m2運(yùn)動(dòng)影響,車(chē)身垂直振動(dòng)z2為“人體-座椅”子系統(tǒng)輸入。“人體-車(chē)身-車(chē)輪”三自由度振動(dòng)系統(tǒng)微分方程為

圖2 人體-車(chē)身-車(chē)輪振動(dòng)模型Fig.2 Human-vehicle body-wheel vibration model

2 路面不平度
車(chē)輛垂直振動(dòng)輸入激勵(lì)為路面凸凹不平。通常將路面相對(duì)基準(zhǔn)平面高度q、沿道路長(zhǎng)度l的變化q(I)稱(chēng)路面不平度函數(shù),見(jiàn)圖3。
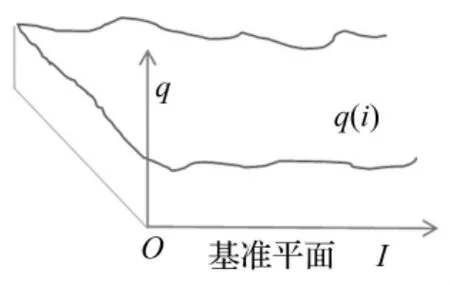
圖3 路面不平度模型Fig.3 Road roughness q(I)model
用空間功率譜密度函數(shù)描述路面不平度[5-6]為

式中:n為空間頻率(單位,m-1),為波長(zhǎng)λ的倒數(shù),表示單位長(zhǎng)度中所含波長(zhǎng)數(shù);n0=0.1/m-1為參考空間頻率;Gq(n0)為參考空間頻率n0下路面功率譜密度值,稱(chēng)路面不平度系數(shù)(單位m3);W為頻率指數(shù),為雙對(duì)數(shù)坐標(biāo)下斜線斜率,決定路面功率譜密度的頻率結(jié)構(gòu)。
功率譜密度與空間功率譜密度間轉(zhuǎn)換關(guān)系為

式中:u為車(chē)輛行駛速度。
3 人體疲勞特性
車(chē)輛在不平路段行駛時(shí)駕駛員臀部吸入通過(guò)輪胎、車(chē)身及座椅傳遞的振動(dòng),單位時(shí)間內(nèi)吸入振動(dòng)的能量稱(chēng)為人體吸入功率。Z向人體吸入功率計(jì)算式[7-10]為

式中:Ai為駕駛員座椅加速度均方根有效值(單位,ft/s2);Ci為第i個(gè)頻譜權(quán)系數(shù),即

式中:Wi為角速度,單位rad/s。
各參數(shù)值見(jiàn)表1,其中fi為第i頻段中心頻率。

表1 人體吸入功率計(jì)算系數(shù)Tab.1 Absorbed power calculation coefficients
人體吸入功率計(jì)算權(quán)系數(shù)Ci隨頻率變化曲線見(jiàn)圖4,人體吸入功率計(jì)算程序流程見(jiàn)圖5。
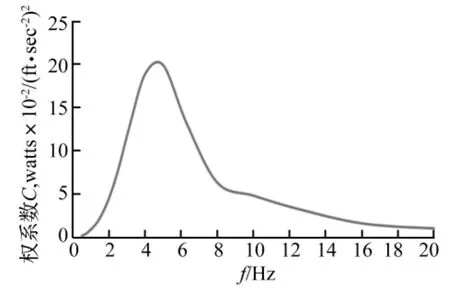
圖4 權(quán)系數(shù)Ci隨頻率變化曲線Fig.4 Frequency-weighting Cicurve
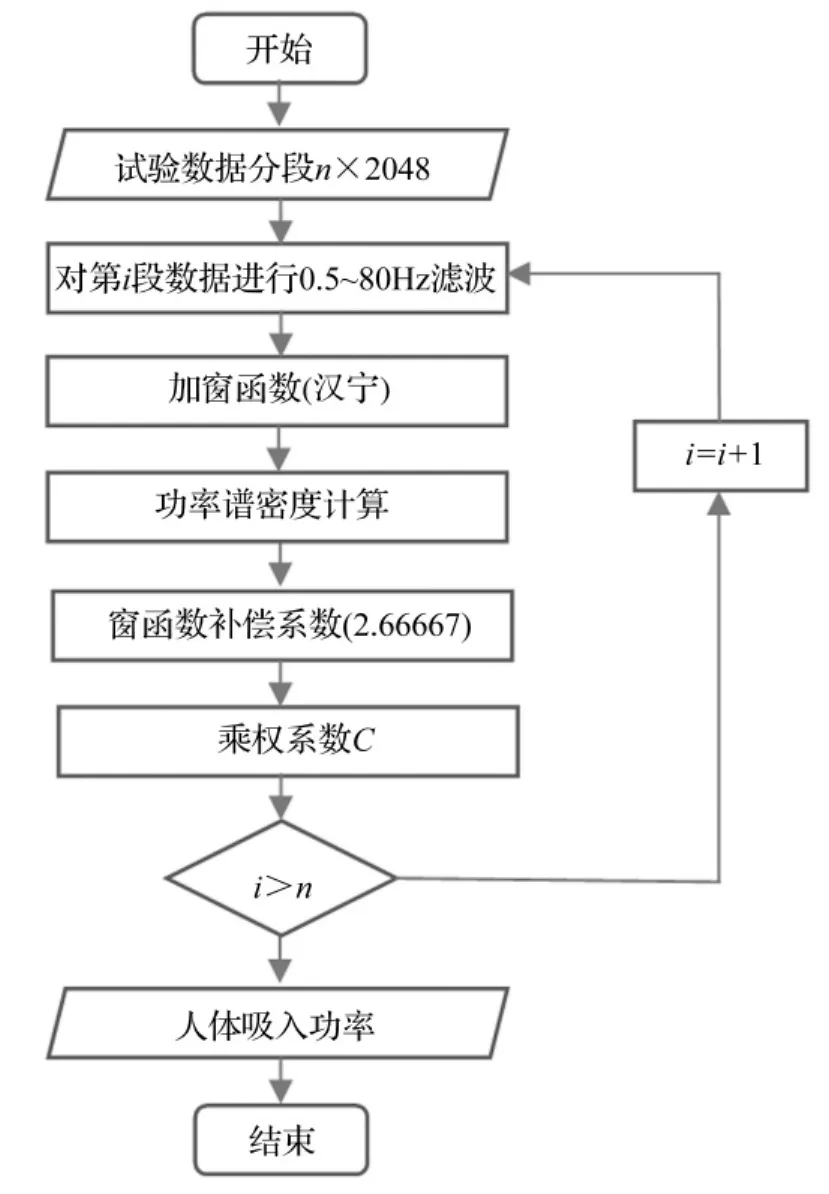
圖5 人體吸入功率程序流程框圖Fig.5 Absorbed power program flow diagram
4 試驗(yàn)測(cè)量
4.1 車(chē)輛偏頻試驗(yàn)及參數(shù)識(shí)別
通過(guò)偏頻試驗(yàn)計(jì)算識(shí)別獲得試驗(yàn)車(chē)輛整車(chē)動(dòng)力學(xué)參數(shù)[4,11]。偏頻試驗(yàn)方法采用滾下法,即將汽車(chē)測(cè)試端車(chē)輪沿斜坡駛上圖6的凸塊,停車(chē)掛空檔發(fā)動(dòng)機(jī)熄火后將汽車(chē)車(chē)輪從凸塊上推下,滾下時(shí)應(yīng)盡量保證左、右輪同時(shí)落地。
試驗(yàn)車(chē)輛偏頻試驗(yàn)過(guò)程見(jiàn)圖7。已知輪胎氣壓為385 kPa,四分之一車(chē)輛整備質(zhì)量為1 724 kg,通過(guò)偏頻試驗(yàn)獲得整車(chē)動(dòng)力學(xué)參數(shù)見(jiàn)表2。
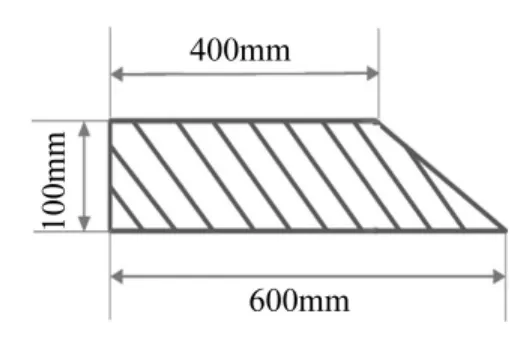
圖6 凸塊斷面示意圖Fig.6 Schematic of the block section plane

圖7 車(chē)輛偏頻試驗(yàn)Fig.7 Vehicle frequency offset test

表2 整車(chē)動(dòng)力學(xué)參數(shù)Tab.2 Vehicle dynamics parameters
4.2 路面不平度測(cè)量
車(chē)輛在路面行駛時(shí),路面不平度引起的振動(dòng)通過(guò)輪胎、車(chē)身、座椅傳遞到駕駛員。故對(duì)試驗(yàn)路段不平度進(jìn)行測(cè)量計(jì)算,試驗(yàn)路段見(jiàn)圖8。
在式(2)、(3)中,若令y=z2-z1,則有

圖8 試驗(yàn)路段Fig.8 Test road

測(cè)量懸架位移y,其均方值統(tǒng)計(jì)計(jì)算式[12]為

式中:A為路面不平程度;V為車(chē)輛行駛速度;u= m2/m1;ε=C/2m2。
估算路面不平程度A為
測(cè)量路面不平度時(shí)車(chē)輛以穩(wěn)定低車(chē)速通過(guò)試驗(yàn)路段,能有效避免輪胎離開(kāi)地面的可能性。車(chē)輛以V=20 km/h車(chē)速通過(guò)試驗(yàn)路段,得=324.540 2。
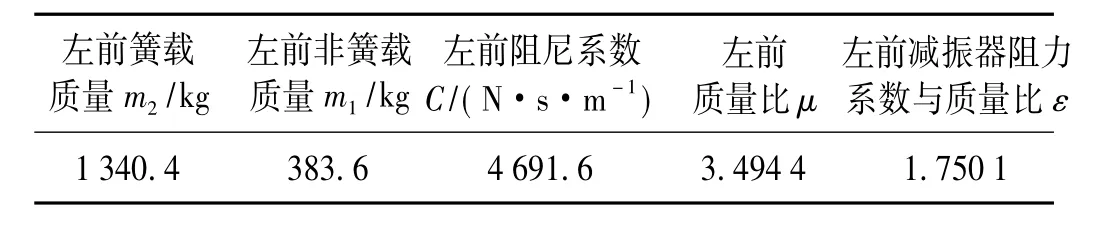
表3 試驗(yàn)車(chē)輛計(jì)算系數(shù)表Tab.3 Test vehicle calculation coefficients
國(guó)標(biāo)路面不平度分級(jí)標(biāo)準(zhǔn)[13-15]n0=0.1 cycle/m,頻率指數(shù)W=2,試驗(yàn)車(chē)輛參數(shù)見(jiàn)表3。據(jù)式(13)計(jì)算得Gq(n0)=0.005 062/m3,查表4知該試驗(yàn)路段屬E級(jí)路面。
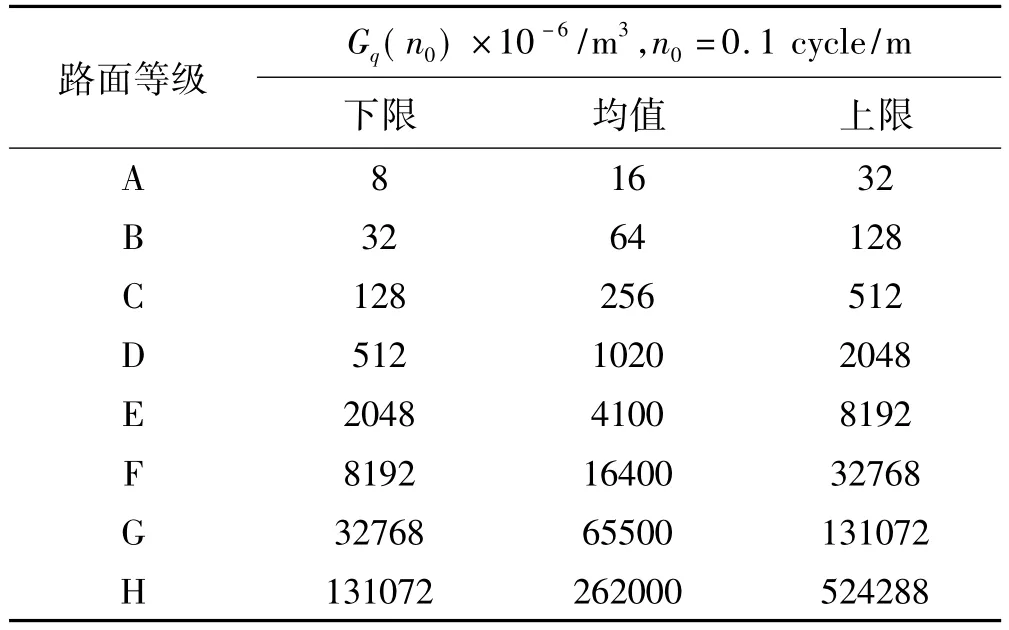
表4 路面不平度分級(jí)Tab.4 Road roughness grades
5 人體吸入功率仿真
5.1 傅里葉逆變換生成時(shí)序信號(hào)
利用上述計(jì)算結(jié)果,并用傅里葉逆變換方法生成試驗(yàn)路段時(shí)序信號(hào)[16]。路面不平度時(shí)域序列x(n)對(duì)應(yīng)的傅里葉變換X(k),Gx(fk)為功率譜密度函數(shù),即
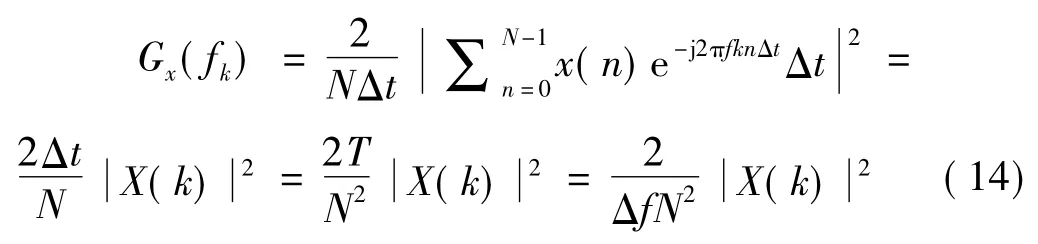
式中:n=0,1,2,…,N-1;k=0,1,2,…,N-1;f為采樣頻率,Δt=1/f;T為采樣時(shí)間;N為采樣點(diǎn)數(shù)。
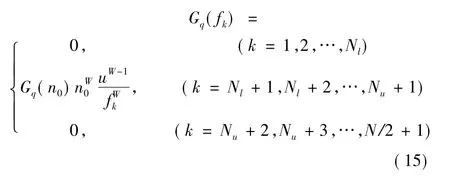
式中:Nl,Nu分別為上下截止頻率(此處取0.5、80 Hz);u為車(chē)速;n0=0.1 cycle/m。
路面隨機(jī)激勵(lì)頻譜Q(k)為

式中:k=1,2,…,N/2+1;φk為路面隨機(jī)激勵(lì)頻譜相位,服從(0,2π)均勻分布。
據(jù)實(shí)數(shù)序列離散傅里葉變換性質(zhì),得采樣點(diǎn)后一半頻譜為

將復(fù)數(shù)序列Q(k)(k=1,2,…,N)進(jìn)行傅里葉逆變換,得時(shí)域路面隨機(jī)激勵(lì)q(n)為

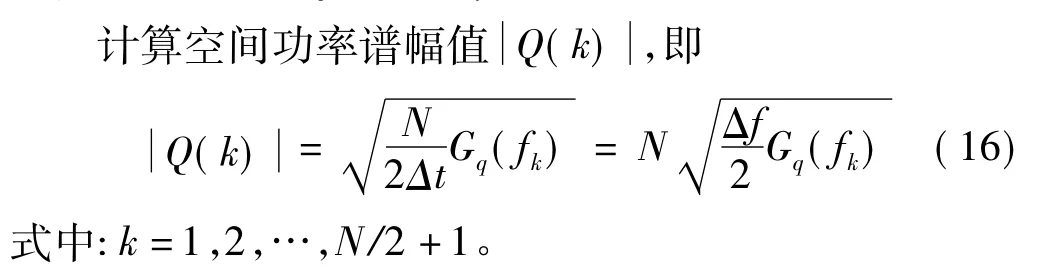
據(jù)式(15)~式(19)計(jì)算擬合獲得試驗(yàn)路段不平度隨機(jī)激勵(lì)信號(hào)q(I),見(jiàn)圖9。
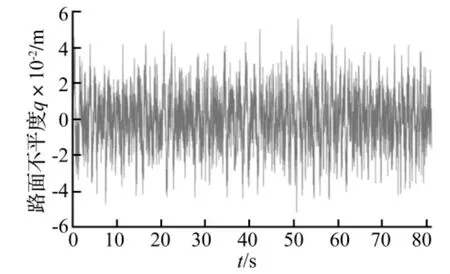
圖9 計(jì)算所得試驗(yàn)路段不平度q(I)時(shí)序信號(hào)Fig.9 Road roughness q(I)sequence signals by the calculation
5.2 Simulink仿真
車(chē)輛在不平路段行駛時(shí),由于路面不平度引起振動(dòng),使駕駛員難以控制車(chē)輛以穩(wěn)定速度通過(guò)不平路段。因此通過(guò)試驗(yàn)方法很難準(zhǔn)確對(duì)車(chē)輛機(jī)動(dòng)性進(jìn)行描述。而仿真軟件可進(jìn)行仿真試驗(yàn),如Matlab Simulink可模擬仿真車(chē)輛高速通過(guò)不平試驗(yàn)路段,從而更準(zhǔn)確評(píng)價(jià)試驗(yàn)車(chē)輛的真實(shí)機(jī)動(dòng)性能[17]。據(jù)表2,利用Matlab Simulink軟件仿真試驗(yàn)車(chē)輛在通過(guò)不平試驗(yàn)路段時(shí)的機(jī)動(dòng)性能,仿真框圖見(jiàn)圖10。利用駕駛員座椅Z向加速度時(shí)序信號(hào),據(jù)式(6)計(jì)算人體吸入功率,見(jiàn)圖11。對(duì)比試驗(yàn)與仿真所得駕駛員Z向吸入功率結(jié)果表明,利用Matlab Simulink仿真及由試驗(yàn)所得數(shù)據(jù)具有一致性,表明仿真能替代試驗(yàn)描述車(chē)輛機(jī)動(dòng)性能。圖11中,吸入功率為6 W時(shí)試驗(yàn)越野車(chē)(UNIMOG)在該路段的機(jī)動(dòng)性能為31.5 km/h。
圖10 Matlab Simulink仿真框圖Fig.10 Matlab Simulink diagram
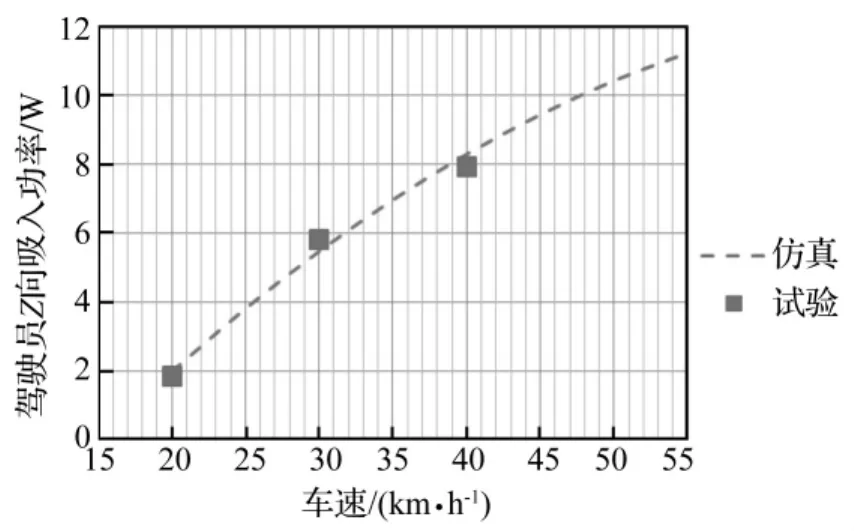
圖11 人體吸入功率Fig.11 Human absorbed power
6 結(jié)論
本文通過(guò)為某奔馳越野車(chē)(UNIMOG-U4000)安裝傳感器進(jìn)行偏頻試驗(yàn)測(cè)量識(shí)別車(chē)輛輪胎、懸架及座椅主要參數(shù);對(duì)試驗(yàn)路段進(jìn)行路面不平度測(cè)量計(jì)算;用傅里葉逆變換生成不平路段時(shí)序信號(hào)作為仿真輸入,利用Matlab Simulink軟件仿真試驗(yàn)車(chē)輛在不平試驗(yàn)路段的機(jī)動(dòng)性能;仿真計(jì)算得出吸入功率為6 W時(shí)試驗(yàn)車(chē)輛(UNIMOG)的機(jī)動(dòng)性能為31.5 km/h。
[1]楊靖.淺談軍用車(chē)輛的越野機(jī)動(dòng)性[J].方艙與地面設(shè)備,2007(2):18-24.
YANG Jing.Discussion on military vehicle mobility[J]. Shelter and Ground Equipment,2007(2):18-24.
[2]SAESP-1567,Commercial use of military truck technology[S].2000.
[3]SAE J1490-1999,Measurement and presentation of truck ride vibrations[S].
[4]余志生.汽車(chē)?yán)碚摚跰].北京:機(jī)械工業(yè)出版社,2007.
[5]趙濟(jì)海,王哲人,關(guān)朝靂.路面不平度的測(cè)量分析與應(yīng)用[M].北京:北京理工大學(xué)出版社,2000.
[6]段虎明,石峰,謝飛,等.路面不平度研究綜述[J].振動(dòng)與沖擊,2009,28(9):95-101.
DUAN Hu-ming,SHI Feng,XIE Fei,et al.Road roughness study overview[J].Journal of Vibration and Shock,2009,28(9):95-101.
[7]ISO2631-1-1997,Mechanicalvibrationandshockevaluation of human exposure to whole-body vibration-part 2-vibration in buildings(1~80 Hz)[S].
[8]ISO 2631-2-2003,Mechanical vibration and shock-evaluation of human exposure to whole-body vibration-part 1[S].
[9]GB-T 4970-2009,汽車(chē)平順性試驗(yàn)方法[S].
[10]Wong J Y.Theory of ground vehicles[R].Fourth Edition,Carleton University,Ottawa Canada,2008.
[11]GB/T 4783-1984,汽車(chē)懸掛系統(tǒng)的固有頻率和阻尼比[S].
[12]郭孔輝.汽車(chē)振動(dòng)與載荷的統(tǒng)計(jì)分析及懸架系統(tǒng)參數(shù)的選擇[J].汽車(chē)技術(shù),1976,4:1-15.
GUO Kong-h(huán)ui.Automobile vibration and load statistical analysis and suspension system parameters selection[J]. Automobile Technology,1976,4:1-15.
[13]GB T7031-2005,機(jī)械振動(dòng)道路路面譜測(cè)量數(shù)據(jù)報(bào)告[S].
[14]ISO-8608-1995,Mechanical vibration-road surface profilesreporting of measured data[S].
[15]王若平,焦賢正,王國(guó)林.基于汽車(chē)車(chē)身垂直加速度的典型道路路面譜識(shí)別研究[J].汽車(chē)工程,2008,30(12): 1047-1051.
WANG Ruo-ping,JIAO Xian-zheng,WANG Guo-lin.A study on road surface spectrum identification of typical roads based on the vertical acceleration of vehicle body[J].Automotive Engineering,2008,30(12):1047-1051.
[16]金睿臣,宋健.路面不平度的模擬與汽車(chē)非線性隨機(jī)振動(dòng)的研究[J].清華大學(xué)學(xué)報(bào)(自然科學(xué)版),1999,39(8): 76-82.
JIN Rui-chen,SONG Jian.Simulation of the road irregularity and study of nonlinear random vibration of the automobile[J].JournalofTsinghuaUniversity(Scienceand Technology),1999,39(8):76-82.
[17]李峻巖,萬(wàn)亦強(qiáng),趙旗,等.軍用汽車(chē)振動(dòng)性能的仿真[J].中國(guó)科技論文在線,2010,10(5):807-812.
LI Jun-yan,WAN Yi-qiang,ZHAO Qi,et al.Vibration Performance simulation of military automobile[J].Science Paper Online,2010,10(5):807-812.
Mobility of off-road vehicle
HAN Yu1,2,MENG Guang-wei1,HUANG Chao-sheng2,MEN Yu-zhuo3
(1.School of Mechanical Science and Engineering,Jilin University,Changchun 130025,China;
2.China FAW Group Corporation R&D Center,Changchun 130011,China;
3.School of Mechatronics Engineering,Changchun Institute of Technology,Changchun 130012,China)
The problem of mobility of off-road vehicle on roughness roads was studied.The vehicle model parameters were identified by using frequency offset tests.The road roughness was estimated by testing the suspension displacement.The driver seat's vertical acceleration time series signal on roughness roads was detected.The absorbed power was calculated based on human tolerance limit.The‘human-vehicle body-wheel'three-degree-of-freedom vibration model was built.The road roughness time series signals were worked out by the inverse Fourier transform,and then were used as the input of the simulation.On the other hand,the driver seat's vertical acceleration signal on roughness roads was simulated by utilizing the Simulink software.The speed at absorbed power of six-Watt was suggested to indicate the mobility of the off-road vehicle passing through roughness roads.
vehicle mobility;road roughness;frequency offset test;dynamics simulation
U467.6
A
10.13465/j.cnki.jvs.2015.02.017
國(guó)家自然科學(xué)基金(51378075)
2014-07-04修改稿收到日期:2014-08-30
韓愈男,博士生,1979年生
孟廣偉男,教授,博士生導(dǎo)師,1959年生
郵箱:mgw@jlu.edu.cn
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
