室內定位新技術淺析
2015-05-13 22:49:28
信息通信技術 2015年5期
關鍵詞:信息
北京郵電大學 北京 100876
引言
室內定位,即室內環(huán)境下的位置感知,通常包括室內繪圖、軌跡追蹤、導航等多方面的內涵和技術要求,在軍事、航天、商業(yè)等多個領域擁有廣闊的應用前景。不同定位技術可以所依托的數(shù)據(jù)樣本類型為區(qū)分,例如以無線信號(包括Wi-Fi、紅外線、超聲波、調頻廣播信號、藍牙等)的強度或角度為基礎的射頻識別技術,以終端傳感器為基礎的慣性導航技術及以磁場環(huán)境為基礎的磁場定位技術等。其中,基于無線信號的定位技術發(fā)展最為迅速,尤其Wi-Fi無線局域網以其廣泛的設施覆蓋、優(yōu)秀的強度空間分辨率及無視距傳輸要求的優(yōu)勢成為眾多室內定位算法的數(shù)據(jù)樣本基礎。而貝葉斯分析方法、拓撲圖等數(shù)學思想在定位算法中的應用也使得算法性能得到大幅提高。
未來室內定位技術的發(fā)展可分為兩個方向,一是尋找新的可用于定位技術的數(shù)據(jù)樣本類型,二是在現(xiàn)有Wi-Fi、藍牙等數(shù)據(jù)載體上創(chuàng)新定位算法。
1 室內定位技術的歷史發(fā)展
定位技術的發(fā)展動力來自于人們對位置信息服務的需求。由于衛(wèi)星定位系統(tǒng)精度較高且使用方便,使其成為室外定位系統(tǒng)的主要技術,而衛(wèi)星信號對建筑物等障礙的遮擋敏感導致室內定位發(fā)展出與室外定位不同的技術系統(tǒng)。Wi-Fi位置指紋、慣性導航、粒子濾波等成為常見的室內定位技術
1.1 早期Wi-Fi定位技術
Wi-Fi定位技術源自20世紀90年代,起初只是在地圖上標注無線接入點位置以方便人們連接使用,后來發(fā)現(xiàn)此種位置信息可用于定位。此種簡易的定位技術可以看作Wi-Fi定位技術的起源,定位精度在10~20米。
1.2 Wi-Fi定位技術的發(fā)展
此后Wi-Fi定位技術迅速發(fā)展,位置指紋定位成為典型的室內定位技術。位置指紋定位的實現(xiàn)分為兩步,即先建立指紋數(shù)據(jù)庫,再利用終端設備實時采集的信息進行匹配從而確定位置信息。位置指紋定位已發(fā)展出多種改進算法,例如KNN(K-Nearest Neighbor)算法等[1]。
1.3 多種室內定位技術出現(xiàn)
進入21世紀后,人們發(fā)現(xiàn)了更多可用于定位的信息,例如終端傳感器參數(shù)、磁場等。慣性導航定位是一種較為方便的定位算法,其通過監(jiān)測終端的方向、加速度等物理傳感器信息,推測目標的運動特征和軌跡,從而實現(xiàn)定位。以智能手機終端為代表的嵌入式隨身電子產品可采集多種傳感器信息,使得慣性導航成為室內定位系統(tǒng)的一個發(fā)展分支。另外Wi-Fi與藍牙信息相結合以及粒子濾波等室內定位技術也得到了發(fā)展。室內定位算法的精度也達到了米級,可以提供更為精確和可靠的位置信息服務。
2 前沿室內定位技術
室內定位技術發(fā)展至今,大致出現(xiàn)了兩個方向,一是使用新的數(shù)據(jù)樣本類型,如可見光、超寬帶、磁場等;二是結合數(shù)學物理思想創(chuàng)新定位算法,如擬合回歸、貝葉斯分析等在定位算法中的應用。文章接下來將介紹幾種新型室內定位技術。
2.1 基于可見光的室內定位技術
可見光通信技術(Visible Light Communication,VLC)是新興的利用可見光波段的光作為載體的無線通信技術。該通信技術利用兼具照明與通信的LED發(fā)光二極管進行信息廣播。IEEE無線個域網工作組,IEEE802.15.7第七工作組已經為可見光通信制定了標準[2]。LED發(fā)光二極管在室內環(huán)境中覆蓋范圍廣泛,使得以此為基礎的室內定位技術發(fā)展前景廣闊。下面介紹一種以可見光為基礎的定位算法。此定位技術所需要的物理設備為特制圖像傳感器終端。
1) 一種基于可見光的定位算法。定位系統(tǒng)模型如圖1所示,PA、PB為LED的位置,PR為圖像傳感器的坐標軸原點,u和v分別為傳感器的橫縱坐標,(ua1,va1)、(ub1,vb1)是LED在傳感器1中的投影坐標,(ua2,va2)、(ub2,vb2)是LED燈在傳感器2中的投影坐標,L是兩個傳感器之間的距離,f為傳感器鏡頭長度。
圖1 VLC定位系統(tǒng)模型
定位過程將分為三步,首先每個圖像傳感器分別計算LED在z軸上的投射角度,然后計算LED與坐標原點的距離,最后用以上信息計算位置。
投射角度是指兩個LED所確定的直線與兩個傳感器所確定的直線在z軸方向上的旋轉角度,如圖2所示,PA、PB為LED的位置,(ul,vl )、(uk,vk )分別是傳感器1和傳感器2所接收到的光線投影坐標,α為投射旋轉角度。
圖2 投射旋轉角度示意圖
當LED在傳感器上的投影坐標已知時,可利用三角函數(shù)知識求得投射角度。

然后計算LED與原點距離。坐標原點為兩圖像傳感器的連線中點,即為圖1中的點PR。可利用空間直線方程來求解LED與原點的距離d。以圖像傳感器1為例,投射光線方程如公式(2)所示,

圖像傳感器2的投射光線方程同理,由此可以得到方程組的解xd、yd、zd。
將得到的解與轉換矩陣相乘,PA與其相減即可得到定位結果PR。
2) 基于可見光的室內定位誤差。以此種定位算法為例,仿真結果顯示,該算法的定位誤差均值在0.5米左右,且圖像傳感器的分辨率越高,單位面積內的像素值越高,定位的誤差均值越低[3]。
2.2 基于超寬帶的室內定位技術
超寬帶技術(Ultra Wide Band,UWB)是一種通過對具有很陡上升和下降時間的沖激脈沖進行直接調制的無線通信技術,信號具有GHz量級的帶寬。使用超寬帶進行定位可以得到很高的定位精度。
1) 一種應用超寬帶的差分定位算法。該算法引入差分概念與終端所得到達時間(Time of Arrival,ToA)信息相結合,可獲得比傳統(tǒng)定位技術更精確的定位結果。
ToA的測量誤差主要為時鐘同步誤差、多徑傳播時延等。差分運算可有效消除固有偏移誤差。算法有兩個源,已知位置信息的對照源和需確定位置信息的目標源。將所得ToA信息進行差分運算以進行修正,從而提高目標源的定位精度。差分運算將應用在兩個地方,一是ToA的數(shù)據(jù)處理,二是最終定位結果的位置修正。
算法的第一步為應用接收到來自至少3個傳感器的ToA信息進行初步定位,方法為簡單的三點定位,有關三點定位的原理可參見文獻[4]。第二步部為差分修正。在測量數(shù)據(jù)處理方面,根據(jù)對照源所提供的數(shù)據(jù)信息來消除測量信息中的固有偏移誤差。在位置修正方面,由對照源的ToA定位結果位置信息減去已知位置信息 可以得到一個偏差e,

然后將其與根據(jù)ToA所計算得出的目標源的位置信息相加使定位結果得到修正,如式(6),為上述利用ToA信息進行初步定位的結果,由此可得到最終位置信息

2) 應用超寬帶的差分定位算法誤差。根據(jù)仿真結果,應用超寬帶的差分定位算法誤差均值為0.5米左右[5]。
2.3 應用物理力學模型的室內定位技術
此類室內定位技術屬于傳統(tǒng)定位技術在算法上的改進。比如物理力學上的彈簧模型,可以用來對傳統(tǒng)定位技術的結果進行修正。這一類的改進定位算法無需特制終端,具有成本上的優(yōu)勢,且定位精度較傳統(tǒng)算法也有明顯提高。下面舉例介紹一種彈簧模型與無線信息定位相結合的定位算法。
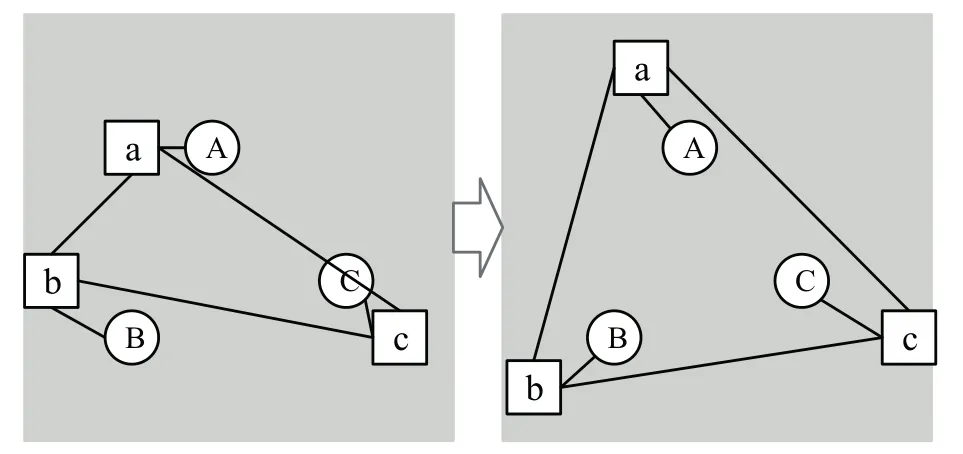
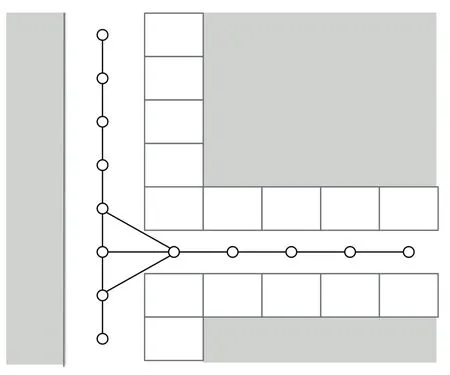
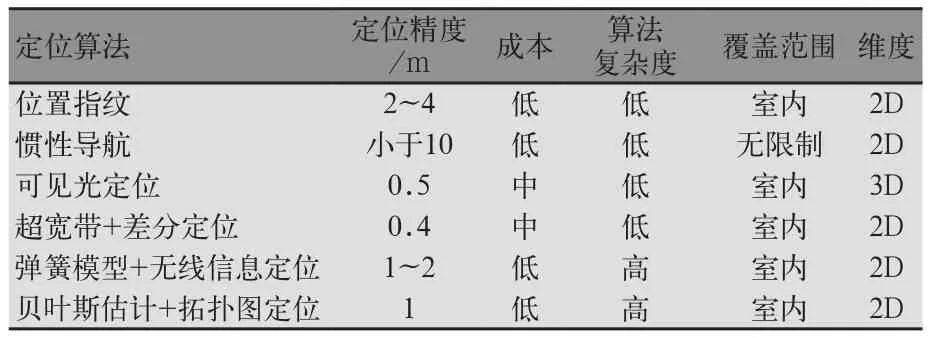
1) 彈簧模型簡介。彈簧模型(Spring Model)是一種描述物理概念的無向圖,包括節(jié)點及節(jié)點連線之間所存在的特定剛性和長度的彈簧,可以非常方便地描述復雜的力學系統(tǒng)。每一個彈簧都有兩個屬性,當前長度d和自然長度l。對于有彈簧相連的兩個節(jié)點,當d>l時,表現(xiàn)為引力,當d 2) 一種彈簧模型與無線信息相結合的定位算法。如前節(jié)所述,基于Wi-Fi等無線信號信息的定位算法是基礎的室內定位算法。傳統(tǒng)的基于Wi-Fi信息的定位算法是應用終端所接收到的信號強度信息(RSS)來定位。Wi-Fi定位主要有兩個類別,一種稱為三角測量方法,利用信號傳播模型結合建筑的幾何空間信息將接入點(AP)的強度度量轉變?yōu)榫嚯x度量。然而各種室內障礙物的存在使這種方法受陰影衰落和多徑效應的影響。另一種為位置指紋定位,即利用終端所接收到的強度信息與已知的指紋數(shù)據(jù)庫比對得到位置信息。此種方法受環(huán)境變化、電磁干擾等影響較大。本節(jié)所述算法可有效解決這些局限。算法包括三個模塊,人群檢測、置信估計和協(xié)同糾錯[4]。圖3是算法的系統(tǒng)結構圖,整個算法兩部分并行,分別處理終端所采集到的Wi-Fi數(shù)據(jù)和藍牙數(shù)據(jù),最后帶入到彈簧模型中對定位結果進行修正。 ①人群檢測。人群檢測模塊感知附近的終端信息并將其作為一個人群簇(People Cluster)。在博物館等類似的公共場合,朋友或家人會自然地形成一個人群簇,這是算法的應用基礎。 如圖3所示,利用Wi-Fi及藍牙的接收信號強度(RSS)作為定位基礎數(shù)據(jù)樣本。一方面終端采集當前區(qū)域Wi-Fi接入點的RSS信息,另一方面采集人群簇中與其相鄰的其它終端的藍牙RSS信息。這兩部分信息將按圖3中所示的兩個不同的流程進行處理。 圖3 彈簧模型結合無線信息的定位算法結構圖 ②基于Wi-Fi的位置估計。圖3的左側分支為基于Wi-Fi信息的位置估計,采用KNN指紋定位算法。離線部分為收集當前區(qū)域的所有AP信息作為指紋數(shù)據(jù)庫,在有限數(shù)量范圍內,指紋定位的誤差與AP的數(shù)量成反比。在線部分將當前所采集到的實時RSS信息與指紋數(shù)據(jù)進行比對,得到指紋最接近的幾個位置信息,取其中心作為定位結果,此處也可采用權重指紋定位算法進行計算。位置估算之后將進行置信估計以確定哪一些估計位置信息更接近真實值。一般說來,估算位置的可信度與Wi-Fi信號的穩(wěn)定度相關。Wi-Fi信號越穩(wěn)定,所計算得到的多個位置參考點的標準差將越小。也就是說,參考點的標準差反映了定位結果的可信度。因此定位結果的可信度可用式(8)來描述。 其中, 表示第x個終端的估計參考點的標準差,每一個終端的一系列估計值都得到之后,可得到指紋定位的置信估計值,將作為彈簧模型的備用參數(shù)。 ③基于藍牙的距離估計。現(xiàn)今幾乎所有智慧型終端均安裝有藍牙模塊。藍牙是工作在2.4GHz頻段的無線傳輸協(xié)議。一般來說,日常生活中所用的藍牙設備最大功率為2.5mW,覆蓋半徑10m。設定d是傳播距離,λ為波長。因藍牙信號頻率為2.4GHz,因此λ為0.125m。利用電磁波傳輸?shù)乃p模型可將藍牙信號的強度度量轉變?yōu)榫嚯x度量,如式(9), 其中,S(x, y)是藍牙設備x、y所檢測到的信號強度。此計算結果的可信度與藍牙信號強度有關。信號強度越強,可信度越高。基于藍牙信號強度的兩設備間距離計算結果的可信度可用式(10)衡量。 其中,-100是為將藍牙信號強度歸一化。同樣的此置信估計值也將作為彈簧模型的參數(shù)備用。 ④協(xié)同糾錯。利用上文中提到的彈簧模型來對定位結果進行糾正,為此需要對傳統(tǒng)的彈簧模型進行修改。每一個智能終端被描述為無向圖中的一個節(jié)點,如圖4所示。 圖 4 彈簧模型修正定位示意圖 圓形節(jié)點為基于Wi-Fi信號強度所計算得出的估計位置,方形節(jié)點為彈簧模型的修正位置。圓形節(jié)點固定,方形節(jié)點可自由移動。相應的圓形節(jié)點和方形節(jié)點之間存在一個0長度彈簧,意味著兩節(jié)點之間僅存在吸引力,它的彈性系數(shù)與上文所得出的定位結果置信估計值有關。兩個方形節(jié)點之間存在一個普通彈簧,可提供吸引力或排斥力,它的彈性系數(shù)與上文得出的距離置信估計值有關。在彈簧模型的修正過程中,方形節(jié)點可自由移動直到達到平衡位置,由此將方形節(jié)點的位置信息作為終端的估計位置信息。 3) 彈簧模型與無線信息結合定位的誤差。仿真結果顯示,該定位算法的誤差均值可低至1m[6]。 大多數(shù)的定位技術均以接收測量信息為基礎,測量信息不可避免的帶有隨機誤差。數(shù)學分析思想,尤其是概率論與數(shù)理統(tǒng)計的相關知識,可以有效解決測量中的隨機誤差問題。貝葉斯分析方法、擬合回歸等數(shù)學思想都可以用于定位技術以提高算法性能,前文所述差分定位技術也是數(shù)學思想在定位中的應用。 同時利用實際環(huán)境地圖與拓撲圖來進行定位就是這一類的定位方法之一[7],即提供了一種利用地標與傳感器在拓撲圖上的定位方法。與之不同的是,接下來要介紹的這種算法以到達時間(TOA)傳感器所提供的距離測度為基礎數(shù)據(jù)樣本,將遞歸貝葉斯濾波與拓撲圖相結合來進行室內定位[8]。 1) 一種貝葉斯分析與拓撲圖相結合的定位算法。該算法包括建立拓撲圖與貝葉斯方法定位兩個模塊。算法的中心思想在于驅使樣本點在拓撲圖上運動,每一步運動的范圍都由距離測量所構建的邊界框所界定,同時樣本僅被允許在拓撲圖上的節(jié)點連線之間運動。 ①建立拓撲圖。拓撲圖是在實際環(huán)境地圖的基礎上建立的抽象地圖,包括必要的節(jié)點及連線。圖5是一個典型的室內走廊拓撲圖。應用拓撲圖進行定位有三個優(yōu)點,一是可減少計算樣本數(shù)量,二是可降低隨機誤差,因樣本只能沿固定的連線運動,三是只需要TOA觀測值作為定位基礎數(shù)據(jù)。 圖5 室內走廊拓撲圖 ②貝葉斯濾波。貝葉斯方法很適合處理測量誤差問題,因此在室內定位中已有廣泛的應用。根據(jù)貝葉斯定理,給定距離測量值目標位置Xt的后驗概率密度為為使算法遞歸循環(huán),假定模型為馬爾可夫過程,當前測量值的噪聲與之前相互獨立, 積分運算后以具備權重的N個樣本值代替,表達式如(12), 拓撲圖可提供更精確的環(huán)境信息,因此,通過拓撲圖產生的粒子比隨機產生的粒子更準確和有效。 ③將拓撲圖與貝葉斯遞歸相結合。原則是應用拓撲圖及最新的測量值來進行遞歸運算。與傳統(tǒng)拓撲圖定位相同,首先需要確定最適合代表目標位置的節(jié)點。本算法所用拓撲圖的節(jié)點僅設置在可能的轉向點,如房間門口、走廊交叉點等,如圖3所示。整個拓撲圖就可以用節(jié)點集合和連線集合來表示。 目標移動速度比節(jié)點間平均距離小一個量級,因此可以應用前一時刻的估計位置決定下一時刻的最佳匹配節(jié)點。假設前一時刻目標位于節(jié)點ct-1,那么下一時刻t目標將位于當前節(jié)點或它的鄰近節(jié)點;因此,減少了節(jié)點搜索數(shù)量,降低了算法復雜度。 根據(jù)樣本計算權重,然后可以利用權重得到t時刻的位置信息,如公式(13)所示。 2) 應用貝葉斯分析與拓撲圖的定位算法誤差。根據(jù)仿真結果,遞歸貝葉斯估計與拓撲圖相結合的室內定位算法誤差均值為1m左右[8]。 室內定位技術的評價標準包括精度、成本、覆蓋范圍等方面,表1列出了幾類較新的定位技術及其性能分析。 定位精度永遠是衡量定位算法性能的第一要素。由表1可以看出,相比較為傳統(tǒng)的位置指紋或慣性導航定位技術,新定位技術的精度有大幅提升。定位誤差均值基本能達到1m及以下,可以滿足大部分室內條件下人們對于位置信息服務的需求。 表1 典型室內定位技術性能分析 由于運用物理模型或數(shù)學思想與無線信息相結合的定位算法是在傳統(tǒng)數(shù)據(jù)樣本類型(即Wi-Fi和藍牙信號信息)的基礎上所做的算法創(chuàng)新,因此,得益于現(xiàn)有Wi-Fi的廣泛覆蓋及藍牙的廣泛應用,無需新的特定終端,成本較低。此類定位技術具有商業(yè)上的發(fā)展前景。而基于可見光的定位技術等使用新型數(shù)據(jù)樣本的定位技術需要特制的終端,成本比傳統(tǒng)算法較高,但其定位原理較為簡單,算法的計算復雜度較低。算法復雜度越高,對終端芯片的運算能力要求就越高。另外,部分此類定位技術可以得到三維空間的定位結果坐標。 本文梳理了室內定位技術的發(fā)展歷程,介紹了幾類目前前沿的室內定位技術,并對其優(yōu)勢和缺陷進行比較分析。 未來的室內定位技術會出現(xiàn)兩個方向上的創(chuàng)新,一是在現(xiàn)有的Wi-Fi、藍牙等無線信息之外尋找新的定位數(shù)據(jù)樣本類型,本文中的可見光定位技術以及利用超聲波進行室內定位的技術就是此方向上的創(chuàng)新。可用于定位的數(shù)據(jù)樣本來源應當具有廣泛的覆蓋基礎或較低的普及成本,樣本信號應當具有較高的空間分辨率和較低的時變性。第二個方向是在現(xiàn)有的數(shù)據(jù)樣本基礎上創(chuàng)新定位算法,其關鍵在于將數(shù)學和物理思想融入定位算法,彈簧模型、貝葉斯估計、拓撲圖等在定位技術中的應用就是此方向上的發(fā)展。其所應用的依然是傳統(tǒng)的Wi-Fi信息,但也可達到較高的定位精度,并且具有成本上的優(yōu)勢。 參考文獻 [1] Saha S,Chaudhuri K,Sanghi D,et al.Location determination of a mobile device using IEEE 802.11 b access point signals[C]// WCNC, 2003,3:1987-1992 [2] IEEE Standard P802.15.7.Short-range Wireless Optical Communication Using Visible Light[S].2011 [3] Myoung-geun,Choi Su-il. Indoor Position Estimation Using Image Sensor Based on VLC[C]// International Conference on Advanced Technologies for Communications,2014 [4] Dae Geun Hwang,Jae Ho Hwang,Sung Jeen Jang,et al.A Fast ToA Position Estimation Technique Based on MHP pulse[C]//Communications and Information Technology,2009:1472-1476 [5] Khalaf-Allah M.Differential ultra-wideband (DUWB)for accurate indoor position estimation:Basic concept and simulation results[C]//Electronics,Communications and Photonics Conference (SIECPC),2013 Saudi International:1- 4 [6] Daisuke Taniuchi,Xiaopeng Liu,Daisuke Nakai,et al.Spring Model Based Collaborative Indoor Position Estimation With Neighbor Mobile Devices[J].IEEE Journal of Selected Topics in Signal Processing,2015,9(2):268-277 [7] Theodoros Theodoridis,Huosheng Hu,Klaus McDonald-Maier,et al.A recursive bayesian filter for landmarkbased localization of a wheelchair robot[C]//In Systems and Computer Science (ICSCS),1st International Conference on:1-6 [8] Yuan Yang,Yubin Zhao,Marcel Kyas.Recursive Bayesian Estimation using A Topological Map for Indoor Position Tracking, IEEE,2014[C]//Vehicular Technology Conference (VTC Spring),2014 IEEE 79th:1-5



2.4 應用數(shù)學分析思想的室內定位技術



3 不同室內定位技術性能分析
3.1 精度分析
3.2 成本及其它分析
4 未來室內定位技術總結及展望
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
