基于路面識別的液壓再生制動防抱死研究
2015-05-11 03:12:08張曉龍孫仁云葛恒勇
制造業(yè)自動化 2015年14期
張曉龍,孫仁云,李 鋒,葛恒勇
(西華大學 汽車與交通學院,成都 610039)
基于路面識別的液壓再生制動防抱死研究
張曉龍,孫仁云,李 鋒,葛恒勇
(西華大學 汽車與交通學院,成都 610039)
0 引言
制動能量回收能夠有效提高汽車能量的利用效率,對于汽車的節(jié)能和環(huán)保有著重要意義[1],目前的研究主要通過電機和液壓泵制動能量回收,而載重車、專用車一般通過液壓泵進行制動能量回收[2]。為了能夠盡可能多地回收制動能量,在小制動強度時往往僅采用液壓再生制動。然而當在低附著系數(shù)的路面(如冰雪路面)上僅采用再生制動時,即便制動強度小,也有可能出現(xiàn)驅(qū)動軸抱死,導致車輛操縱穩(wěn)定性嚴重下降[3]。解決這一問題的常用方法是在車輪即將抱死時,切斷再生制動,采用傳統(tǒng)ABS制動[4],然而這將降低制動能量的回收。
本文通過調(diào)節(jié)液壓泵的排量,使液壓再生制動具備防抱死功能,從而最大限度地回收制動能量。同時考慮到不同路面的附著特性的差異,只有將當前路面的最佳滑移率作為系統(tǒng)的目標滑移率才能最大限度地利用路面的附著條件[5],提出基于路面識別的液壓再生制動防抱死研究。
1 輪胎模型
Burckhardt等人通過大量試驗擬合出了6種典型路面的)(sμ曲線,如圖1所示,給出了一個實用的輪胎—路面數(shù)學模型,其表達式為[5]:

式中c1、c2、c3為各典型路面的參數(shù)值,如表1所示。通過求極值的方法得到6種典型路面的最佳滑移率0s及峰值附著系數(shù)0μ,如表1所示。

圖1 典型路面的)(sμ曲線
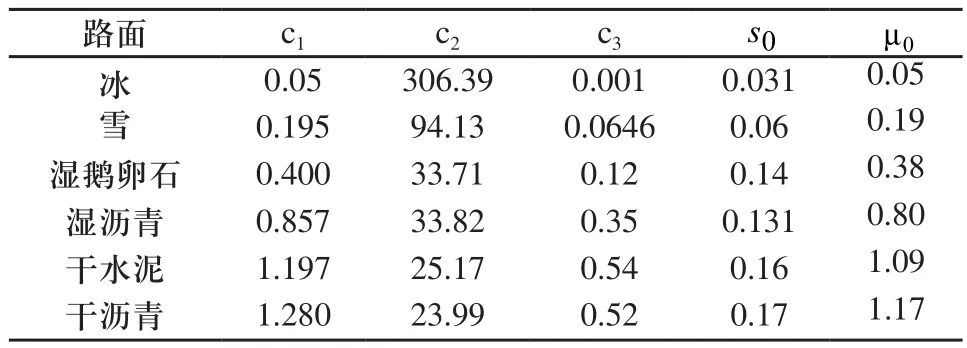
表1 輪胎模型中各典型路面參數(shù)值、0s及0μ
2 液壓再生制動ABS
要使車輛僅采用液壓再生制動時具備防抱死功能,需要根據(jù)制動時車輪的實際滑移率來實時調(diào)整液壓再生制動力矩,確保實際滑移率保持在目標滑移率附近。
已知液壓泵產(chǎn)生的再生制動力矩大小為[6]:

式中:p為液壓泵工作壓力(MPa);qmax為液壓泵的最大排量(mL/r);i為液壓泵的排量系數(shù)(0≤≤i1);η為液壓泵總效率;iqmax為液壓泵的實時排量(mL/r)。
從式(2)可以看出,再生制動力矩的大小與液壓泵的排量有關,因此,可采用變量液壓泵進行制動能量回收,通過調(diào)節(jié)變量泵的排量來改變再生制動力矩的大小。如圖2所示,以滑移率為控制目標,通過調(diào)節(jié)變量泵的排量使液壓再生制動實現(xiàn)防抱死。考慮到不同路面的最佳滑移率往往不同,以固定的滑移率作為控制目標時,不能最大限度地利用路面的附著條件,這就需要在制動過程中對當前路面進行識別,同時將當前路面的最佳滑移率調(diào)整為控制器的目標滑移率。

圖2 液壓再生ABS總體結構
3 路面識別
傳統(tǒng)的通過參數(shù)估算進行路面識別的方法通常都離不開滑移率,在識別過程中需要實時估算車輪的滑移率,同時將滑移率與其他參數(shù)對應起來,估算滑移率時需要測量輪速和車速,而要準確測量車速難度比較大,同時計算量和數(shù)據(jù)量也非常大,給實車應用帶來諸多不便。本文將附著系數(shù)的波動區(qū)間作為識別區(qū)間,無需滑移率即可實現(xiàn)路面識別。
如表1所示,根據(jù)Burckhardt模型得到各典型路面的理論峰值附著系數(shù),而實際生活中同一典型路面的峰值附著系數(shù)往往會有不同程度的差異,但可以確定的是每種典型路面峰值附著系數(shù)的實際值必然在其理論值附近波動,因此根據(jù)Burckhardt模型中的理論峰值附著系數(shù)可設計出各典型路面實際峰值附著系數(shù)的波動區(qū)間,如表2所示。
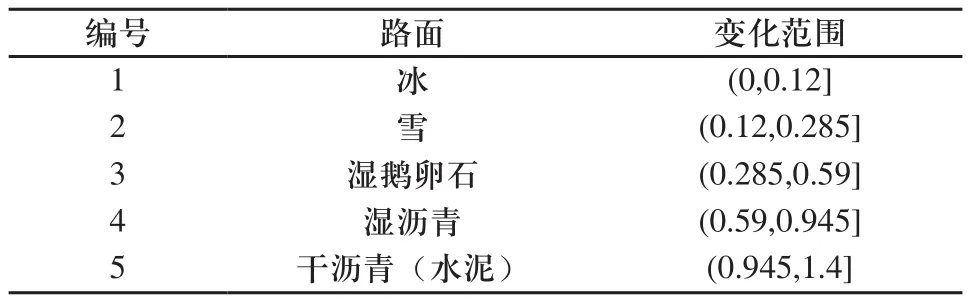
表2 峰值附著系數(shù)的波動區(qū)間
實際生活中各典型路面的實際峰值附著系數(shù)必然在對應的波動區(qū)間內(nèi)波動,也就是說在整個滑移率區(qū)間上,各典型路面的附著系數(shù)均小于其峰值附著系數(shù)波動區(qū)間的上限,因此以路面附著系數(shù)為識別參數(shù),以峰值附著系數(shù)的波動區(qū)間為識別區(qū)間可進行路面識別。
制動開始后,實際滑移率從0向目標滑移率增加,車輛的制動力系數(shù)也從0開始遞增,制動力系數(shù)首先落入路面1(冰)的識別區(qū)間((0,0.12]),因此將系統(tǒng)目標滑移率的初始值設為冰路面的最佳滑移率0.031,制動開始后實際滑移率從0向0.031快速遞增,最終保持在0.031附近,如果制動力系數(shù)的估算值始終在區(qū)間(0,0.12](冰路面的峰值附著系數(shù)波動區(qū)間)內(nèi)波動,則表示即便是在路面1(冰)的最佳滑移率下當前路面的附著系數(shù)也小于路面1(冰)峰值附著系數(shù)波動區(qū)間的上限,結合圖1可看出當前路面必然為路面1(冰)。
如果制動力系數(shù)的估算值超出路面1(冰)的識別區(qū)間,必然首先落入路面2(雪)的識別區(qū)間,系統(tǒng)識別出當前路面為路面2(雪),目標滑移率調(diào)整為路面2(雪)的最佳滑移率0.06,以此類推,系統(tǒng)按照冰、雪、濕鵝卵石、濕瀝青、干瀝青(水泥)的順序,根據(jù)估算的制動力系數(shù)對當前路面進行判定,從而完成路面識別。圖3為識別過程框圖。

圖3 識別過程框圖
4 試驗研究
4.1 聯(lián)合仿真
如圖4所示,在Amesim中通過變量液壓泵/馬達建立液壓再生制動系統(tǒng),制動時液壓泵/馬達作為泵工作,產(chǎn)生的再生制動力矩對車輪進行制動,同時將汽車制動的機械能轉(zhuǎn)化為液壓能,儲存在儲能器中,回收制動時的能量。驅(qū)動時液壓泵/馬達作為馬達工作,消耗儲能器中的高壓油為車輪提供動力,釋放回收的制動能量。
在Simulink中搭建車輛模型、識別算法及控制策略,通過兩個軟件進行聯(lián)合仿真。預設車輛在雪路面上以10m/s的初速度進行制動,僅采用液壓再生制動。

圖4 聯(lián)合仿真模型
如圖5所示,系統(tǒng)按照附著系數(shù)由低至高的順序?qū)Ξ斍奥访嬉来芜M行判斷識別,識別結果與預設路面一致,識別快速準確。圖6為滑移率-時間曲線,制動過程中實際滑移率對最佳滑移率的跟蹤快速準確,基本保持在當前路面的最佳滑移率,控制效果良好,充分利用了當前路面的附著條件。圖7為速度-時間曲線,當車速小于1m/s時,再生ABS停止工作,輪速快速減小,2秒時車輪抱死,液壓再生制動ABS工作過程中車輪沒有出現(xiàn)抱死,可見在低附著系數(shù)路面上制動時,液壓再生制動具備防抱死功能,制動效果良好。如圖8所示,制動過程中系統(tǒng)根據(jù)實際滑移率實時調(diào)整變量液壓泵的排量系數(shù),改變液壓泵的實時排量,從而調(diào)節(jié)液壓再生制動力矩,防止車輪抱死。

圖5 路面識別仿真結果

圖6 滑移率-時間曲線
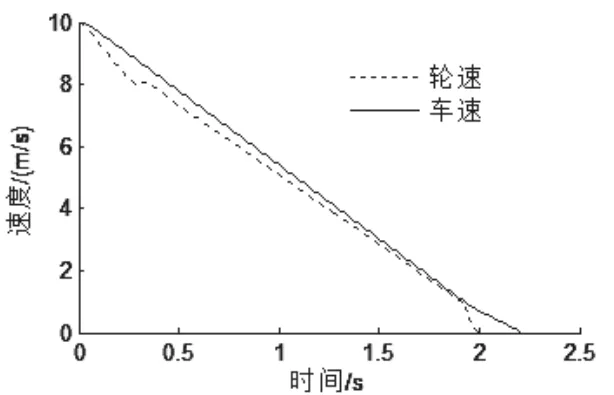
圖7 速度-時間曲線

圖8 排量系數(shù)-時間曲線
4.2 路面識別道路實驗
如圖9所示,利用六分力測試儀在干瀝青路面進行道路實驗,車輛在制動過程中實時采集車輪受到的縱向力和法向力信號,利用小波工具箱對信號去噪,得到制動時車輪受到的縱向力FX和法向力FZ,根據(jù)式(3)可計算出制動力系數(shù)μ,如圖10所示。


圖9 六分力測試儀

圖10 制動力系數(shù)-采樣點數(shù)曲線
制動開始后,隨著制動強度增大,制動力系數(shù)逐漸增大,依次超出冰、雪、濕鵝卵石、濕瀝青路面的識別區(qū)間,當采樣點數(shù)在115左右時,制動力系數(shù)達到最大值1.04,最終落入干瀝青(水泥)路面的識別區(qū)間,識別出當前路面為干瀝青(水泥)路面。
道路實驗表明以路面附著系數(shù)為識別參數(shù),以各典型路面峰值附著系數(shù)的波動區(qū)間為識別區(qū)間能夠?qū)崿F(xiàn)路面狀態(tài)的準確識別。
5 結論
1)以路面附著系數(shù)為識別參數(shù),以峰值附著系數(shù)的波動區(qū)間為識別區(qū)間,在制動時對當前路面快速準確地完成識別。
2)以變量液壓泵進行制動能量回收,通過調(diào)節(jié)變量泵的排量來調(diào)整液壓再生制動力矩,使液壓再生制動具備防抱死功能。
3)根據(jù)路面識別結果調(diào)整控制器的目標滑移率,確保車輛在不同路面制動時,完全采用液壓再生制動能夠最大限度利用路面附著條件。
[1]王猛,孫澤昌,卓桂榮,等.電動汽車制動能量回收系統(tǒng)研究[J]. 農(nóng)業(yè)機械學報,2012,43(2):85-88.
[2]徐耀挺,寧曉斌,王秋成.基于AMESim的純電動汽車液壓再生制動系統(tǒng)的研究[J].機電工程,2012(2):146-150.
[3]趙國柱,滕建輝,魏民祥,等.基于模糊控制的電動汽車低速再生ABS研究[J].中國機械工程,2012,23(1):117-121.
[4]Zhang Jian-long,Yin Cheng-liang,Zhang Jian-wu.Designand analysis of electro-mechanical hybrid anti-lock brakingsystem for hybrid electric vehicle utilizing motor regenerativebraking[J].Chinese Journal of Mechanical Engineering,2009,1(22):42-49.
[5]張曉龍,孫仁云,李鋒,等.基于平均附著系數(shù)的路面識別方法研究[J].中國測試,2014,40(6):99-103.
[6]張曉慧.液壓混合動力車輛再生制動與ABS協(xié)調(diào)控制[D].哈爾濱:哈爾濱工業(yè)大學,2011.
Study on hydraulic regenerative anti-lock braking system based on road identification
ZHANG Xiao-long, SUN Ren-yun, LI Feng, GE Heng-yong
為了使液壓再生制動單獨工作時具備防抱死功能,通過變量液壓泵進行制動能量回收,在制動時以各路面峰值附著系數(shù)的波動區(qū)間為識別區(qū)間進行路面識別,以識別路面的最佳滑移率為控制目標,通過調(diào)整液壓泵的排量來調(diào)節(jié)再生制動力矩。通過Amesim和Simulink進行聯(lián)合仿真,結果表明該系統(tǒng)在制動時能夠快速準確地完成路面識別,液壓再生制動具備防抱死功能,最后通過道路實驗對路面識別方法作了進一步驗證。
路面識別;聯(lián)合仿真;液壓再生;防抱死
張曉龍(1988 -),男,陜西蒲城人,碩士,主要從事汽車電控技術研究。
U463
A
1009-0134(2015)07(下)-0090-03
10.3969/j.issn.1009-0134.2015.07(下).28
2015-03-05
西華大學研究生創(chuàng)新基金;四川省科技廳應用基礎項目(2012JY0049);西華大學人才培養(yǎng)與引進基金項目(R0920301)
