基于ADAMS的仿人機(jī)器人步態(tài)仿真與分析
2015-05-07 09:48:32安志亮李衛(wèi)國(guó)王利利蔡長(zhǎng)亮
機(jī)械工程師 2015年4期
關(guān)鍵詞:分析
安志亮, 李衛(wèi)國(guó), 王利利, 蔡長(zhǎng)亮
(內(nèi)蒙古工業(yè)大學(xué)a.機(jī)械學(xué)院;b.工程訓(xùn)練中心,呼和浩特 010051)
0 引言
仿人機(jī)器人是機(jī)構(gòu)、驅(qū)動(dòng)、傳感等核心部件,以及仿生、交互、智能等技術(shù)的一種綜合集成平臺(tái),是當(dāng)今機(jī)器人領(lǐng)域最為前沿的課題之一,同時(shí)實(shí)現(xiàn)穩(wěn)定步行又是仿人機(jī)器人研究領(lǐng)域的熱點(diǎn)和難點(diǎn)。穩(wěn)定步行是仿人機(jī)器人最基本的類人行為方式,也是實(shí)現(xiàn)其它行為的基礎(chǔ),仿人機(jī)器人因其靈活的步行能力而具有廣泛的應(yīng)用前景[1]。同時(shí)仿人機(jī)器人又是一個(gè)多自由度多剛體系統(tǒng)[2],由于其自由度多因此運(yùn)動(dòng)具有復(fù)雜性和不確定性。應(yīng)用虛擬樣機(jī)技術(shù)可以簡(jiǎn)化仿人機(jī)器人設(shè)計(jì)過(guò)程中的復(fù)雜性和不確定性,能使運(yùn)動(dòng)與動(dòng)力學(xué)分析更加直觀更具有可操作性。使用ADAMS這一系統(tǒng)仿真軟件,可以在各種虛擬環(huán)境中真實(shí)地模擬系統(tǒng)運(yùn)動(dòng)并進(jìn)行分析,從而達(dá)到系統(tǒng)運(yùn)動(dòng)的優(yōu)化設(shè)計(jì)。因此應(yīng)用ADAMS軟件對(duì)仿人機(jī)器人步態(tài)進(jìn)行仿真分析具有重要意義。
本文利用Pro/E軟件對(duì)機(jī)器人的零部件進(jìn)行設(shè)計(jì)并且進(jìn)行了裝配,在Pro/E環(huán)境下完成了機(jī)器人的三維建模。然后導(dǎo)入到ADAMS中進(jìn)行了運(yùn)動(dòng)仿真,并且進(jìn)行了運(yùn)動(dòng)分析,最后針對(duì)分析結(jié)果對(duì)仿人機(jī)器人步態(tài)規(guī)劃進(jìn)行了優(yōu)化設(shè)計(jì)。
1 機(jī)器人的結(jié)構(gòu)模型
如圖1所示利用Pro/E對(duì)該仿人機(jī)器人本體設(shè)計(jì)進(jìn)行建模。機(jī)器人由腳部、膝部、腿部、胯部、背部、肩部、手部、頭部組成。其中的腳部、膝部、腿部、胯部、肩部、手部、頭部都用舵機(jī)來(lái)實(shí)現(xiàn)。各部分通過(guò)舵機(jī)及舵機(jī)支架以及必要的連接件連接起來(lái)。由于仿人機(jī)器人行走主要是靠下肢,同時(shí)要兼顧人體行走各部分運(yùn)動(dòng)的協(xié)調(diào)性所以對(duì)機(jī)器人的上肢進(jìn)行了簡(jiǎn)化設(shè)計(jì)。Pro/E中裝配圖如圖1。
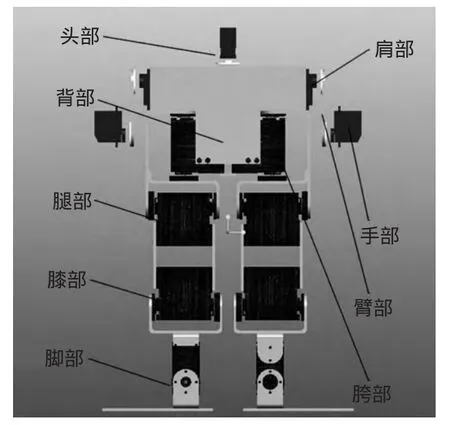
圖1 仿人機(jī)器人的裝配圖
2 機(jī)器人的仿真模型
首先將在Pro/E中建立的模型導(dǎo)入到ADAMS中。在ADAMS中對(duì)各零部件定義材料密度屬性或質(zhì)量屬性,然后定義各種約束副、運(yùn)動(dòng)副,施加載荷,并可對(duì)關(guān)鍵的變量建立測(cè)量輸出,這樣就建立起了仿真模型[3]。仿真模型建立結(jié)果如圖2所示。
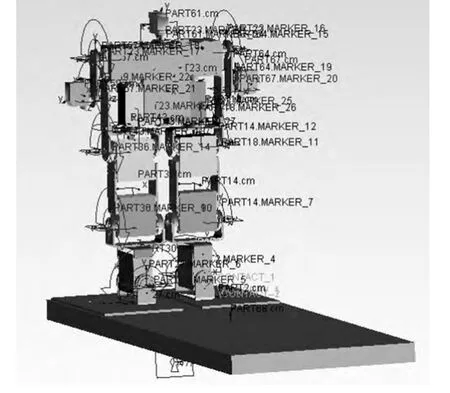
圖2 仿真模型圖
該模型中地板與大地采用固定副連接,其他各個(gè)關(guān)節(jié)采用轉(zhuǎn)動(dòng)副連接以保證所設(shè)計(jì)的自由度。同時(shí)要對(duì)仿真環(huán)境進(jìn)行設(shè)定,對(duì)于在ADAMS中建立仿真環(huán)境的問(wèn)題,應(yīng)該遵循最大程度地模擬實(shí)際環(huán)境的原則來(lái)進(jìn)行解決,本文中考慮到重力、機(jī)器人腳底與地面的摩擦、腳底和地面的接觸力等諸多因素。
在仿人機(jī)器人的左腳板與地板、右腳板與地板之間分別定義接觸,接觸參數(shù)如表1。
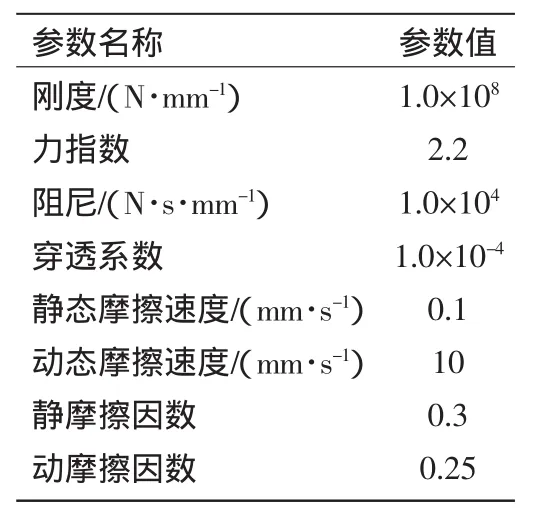
表1 接觸參數(shù)表
3 運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)仿真分析
3.1 仿人機(jī)器人的步態(tài)規(guī)劃
仿人機(jī)器人步態(tài)周期包含2個(gè)周期:?jiǎn)瓮戎沃芷诤碗p腿支撐周期。在雙腿支撐周期,仿人機(jī)器人雙腳都與地面接觸,這個(gè)周期起始于前腿的后腳跟與地面接觸,結(jié)束于后腿腳趾離開地面時(shí)。單腿支撐周期指仿人機(jī)器人一條腿與地面接觸,另一條腿從后面離開地面擺動(dòng)到前面與地面接觸這段時(shí)間。雙腿支撐周期一般占整個(gè)步態(tài)周期的20%左右[4]。針對(duì)本文所設(shè)計(jì)的機(jī)器人,機(jī)器人的行走由雙腿支撐周期開始,在雙腿支撐周期內(nèi)仿人機(jī)器人首先通過(guò)雙腳關(guān)節(jié)的運(yùn)動(dòng)把機(jī)器人的重心轉(zhuǎn)移到單腿支撐的一側(cè),同時(shí)一只腳逐漸離開地面,雙腿支撐周期結(jié)束,進(jìn)入單腿支撐周期,通過(guò)支撐的單腿關(guān)節(jié)和單膝關(guān)節(jié)的配合運(yùn)動(dòng),仿人機(jī)器人的重心向前移動(dòng),移動(dòng)之后擺動(dòng)腿向前移動(dòng)邁出一大步,邁步之后通過(guò)雙腳關(guān)節(jié)的旋轉(zhuǎn)機(jī)器人的擺動(dòng)腳落地,單腿支撐期結(jié)束又一次進(jìn)入了雙腿支撐期。這樣就完成了一個(gè)完整的步態(tài)周期。仿人機(jī)器人向前行走完全可以看做是步態(tài)周期的循環(huán)往復(fù),在循環(huán)的過(guò)程中擺動(dòng)腿和支撐腿每2個(gè)步態(tài)周期進(jìn)行一次變換。
3.2 仿人機(jī)器人步態(tài)仿真
仿真過(guò)程中一個(gè)步態(tài)周期設(shè)定為4 s,仿真的結(jié)束時(shí)間設(shè)定為8 s,仿人機(jī)器人由立正到完成2個(gè)步行周期。運(yùn)動(dòng)仿真的序列關(guān)鍵幀如圖3所示。
3.3 仿真結(jié)果分析
仿真開始之前分別在PART23的質(zhì)心點(diǎn)設(shè)定了Measure,由于PART23部件是整個(gè)上半身的質(zhì)心點(diǎn)。因此可以從PART23的質(zhì)心點(diǎn)的移動(dòng)軌跡來(lái)反映出仿人機(jī)器人在整個(gè)步行過(guò)程中重心的移動(dòng)軌跡。圖4表示的是仿人機(jī)器人的重心在行走過(guò)程中沿水平方向的位移,可以反映出仿人機(jī)器人行走的連續(xù)性,同時(shí)可以根據(jù)位移除以時(shí)間來(lái)算出仿人機(jī)器人的行走速度。圖5表示的是仿人機(jī)器人的重心沿垂直方向的位移,可以看出在行走過(guò)程中重心在垂直方向上的位移在適當(dāng)?shù)脑试S范圍內(nèi)。圖6表示的仿人機(jī)器人重心在行走過(guò)程中左右搖擺的幅度。可以在圖中清晰地看出優(yōu)化后的機(jī)器人重心在水平方向上的位移更加平滑。但是在垂直方向上波動(dòng)比優(yōu)化前的幅度要大。總體來(lái)說(shuō)優(yōu)化之后的步態(tài)規(guī)劃要優(yōu)于之前的。

圖4 PART23質(zhì)心位置沿x軸方向隨時(shí)間的變化曲線

圖5 PART23質(zhì)心位置沿y方向隨時(shí)間的變化曲線
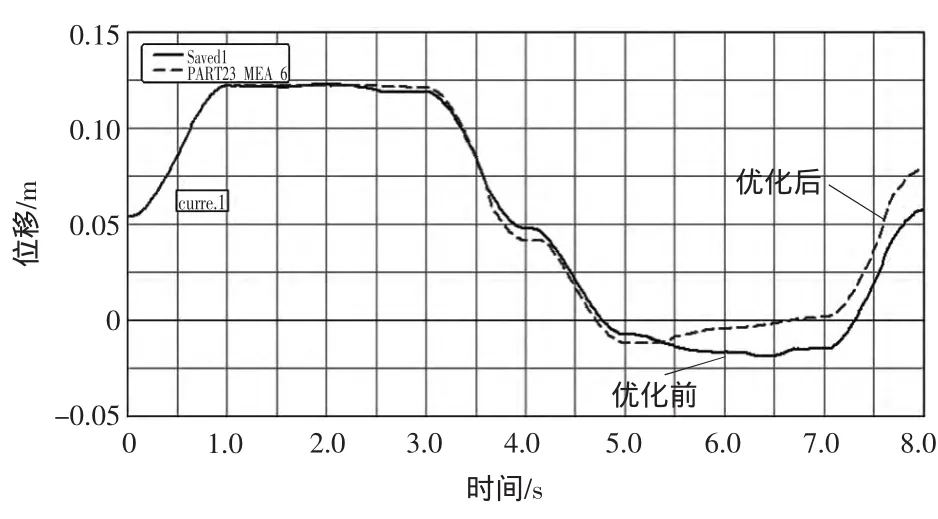
圖6 PART23質(zhì)心位置沿z方向隨時(shí)間的變化曲線
4結(jié)語(yǔ)
本文通過(guò)Pro/E對(duì)機(jī)器人的結(jié)構(gòu)進(jìn)行了建模,然后導(dǎo)入到ADAMS中,在ADAMS對(duì)各零部件定義材料密度屬性或質(zhì)量屬性,然后定義各種約束副、運(yùn)動(dòng)副,施加重力和接觸力并可對(duì)關(guān)鍵的變量建立測(cè)量輸出。隨后對(duì)仿人機(jī)器人進(jìn)行了步態(tài)規(guī)劃,并根據(jù)步態(tài)規(guī)劃設(shè)定Motion中STEP函數(shù)的值,最后對(duì)仿人機(jī)器人進(jìn)行了步態(tài)仿真并對(duì)仿真結(jié)果進(jìn)行了分析,并且機(jī)器人步態(tài)進(jìn)行了步態(tài)優(yōu)化。
[1] 付根平.仿人機(jī)器人的步態(tài)規(guī)劃和步行控制研究[D].廣州:廣東工業(yè)大學(xué),2013.
[2] 李敬,黃強(qiáng),余張國(guó),等.人體步行規(guī)律與仿人機(jī)器人步態(tài)規(guī)劃[J].中國(guó)科學(xué),2012(9):42-9.
[3] 楊春光,趙世平,陸小龍,等.基于虛擬樣機(jī)的攀爬機(jī)器人仿真分析[J].機(jī)器人技術(shù),2009(2):73-75.
[4] Qiang Huang,Yokoi,K,Kajita S,et al.Planning Walking Patterns for a Biped Robot[J].IEEE Tran.on Robotics and Automation,2001,17:280-289.
[5] 劉晉霞,胡仁喜,康士延,等.ADAMS2012從入門到精通[M].北京:機(jī)械工業(yè)出版社,2013.
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
