淺談短波監測車測向性能指標的測試方法
2015-05-07 04:56:20董斐斐
數字通信世界 2015年1期
萬 峻,董斐斐,陳 良
(國家無線電監測中心成都監測站,成都 611136)
1 引言
移動監測測向車是逼近查找干擾源的重要手段,監測車測向性能對于圓滿完成移動監測工作至關重要。監測測向設備通過安裝、架設,與車輛融為一體,組成監測測向車系統,其各項性能指標,尤其是測向指標會受到一定的影響。工作中,我們常需要對監測車系統測向性能進行有效地測試,確保監測車測向性能指標達到廠家標稱參數,工作狀態良好。
根據多次驗收、維護短波監測測向車的工作經驗,參考國內外標準、規范,并結合無線電監測技術理論研究,筆者粗淺地總結出有關短波監測測向車測向性能指標(地波測向精度、測向靈敏度、測向最小持時間)的測試方法,在此進行介紹。
2 測試條件
2.1 測試環境要求
測試時場地天氣應符合被測系統對工作環境的要求:
(1)環境溫度:-10℃~45℃。
(2)環境濕度:10%~80%。
(3)大氣壓強:86kPa~106kPa。
2.2 測試場地要求
(1)地面平坦開闊,遠離高壓線、河流、廠房、高大障礙物、強輻射源。
(2)場地大小至少需要20λ長、10λ寬(以3MHz為典型值,約需2km長,1km寬)。
2.3 監測測向車狀態
(1)測試應在車輛啟動時進行。
(2)在測試與角度無關的項目時,應將監測測向車天線標稱“N”方向(通常是車頭方向)對準信號源系統。
(3)測試前,應將被測系統進行充分預熱,并開啟測向系統設備自檢,驗證硬件狀態正常。
2.4 測試設備技術指標要求
所使用的測試設備均應取得計量合格證書,并在有效期內。
(1)短波信號源系統具有可編程能力;頻率范圍(包含HF頻段)為3MHz~30MHz;功率可調為-60dBm~6dBm;頻率精度為1Hz;頻率穩定度為≤1×10-7;天線極化方式與被測系統天線極化方式一致,架設高度與被測系統相當;具有功率放大模塊,最大輸出功率≥100W。
(2)GPS系統定位精度為1m~3m。
(3)轉臺位置指示器測量誤差≤0.2°。
3 測試方法
3.1 地波測向精度測試
通過測量已知信號源的地波信號,計算移動監測測向系統實際測量示向度與理論示向度之間的角度偏差(均方根值),用以標稱系統地波測向準確度。
3.1.1 測試系統結構
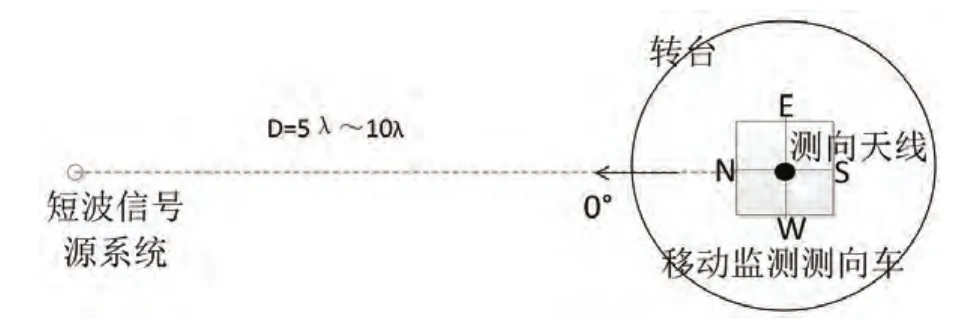
圖1 測試系統結構圖
3.1.2 測試步驟
(1)按1MHz的頻率間隔選取頻率f(避開干擾)共27個,形成測試頻率列表。
(2)選定信號源架設位置,利用GPS準確測量發射天線經緯度。
(3)將被測系統置于轉臺上,將測向天線中心與轉臺中心重合,利用GPS準確測量測向天線中心經緯度。
(4)利用經緯儀觀測,將測向天線的“N”方向與轉臺方位角“0°”調整一致,并對準信號源發射天線方向。
(5)通過2處天線的經緯度,計算出天線之間的距離。
(6)被測系統參數設置建議:自動增益控制AGC為開,設置衰減為0,測向平均時間為1s,測向帶寬設置為3kHz,屏蔽電子羅盤功能。
(7)設置信號源發射頻率為當前測試頻率f,發射輸出為標準單載波信號,當被測系統上監測到地波信號的信噪比≥9dB,且示向度穩定時,記錄信號頻率、時間、示向度θ等數據。
(8)根據測試頻率列表改變頻率,重復(7),直至所有測試頻率測試完畢。
(9)控制轉臺順時針旋轉15°,重復(7)~(8),直至轉臺順時旋轉到345°,記錄在24個方位角上測得的所有數據。
(10)根據監測數據,計算地波測向均方根偏差:
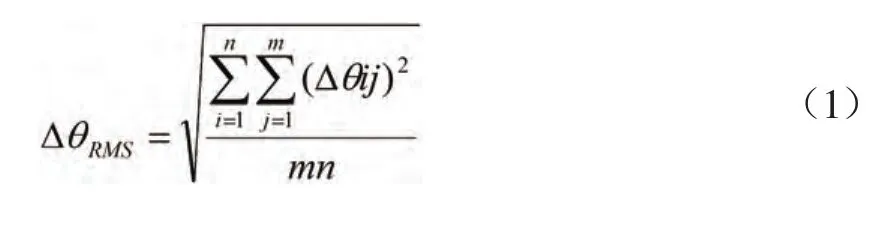
式中,m為轉臺位置數;n為測量頻點數; 為第j個轉臺位置處第i個測量頻點的示向偏差。
3.1.3 測試數據記錄及結果

表1 地波測向精度測試數據表
3.2 系統測向靈敏度測試
通過測試已知信號源的地波信號,在給定的方位波動角度條件下,讀取移動監測測向系統的場強值,用以標稱監測測向車系統整體(包括天線、饋線、測向設備)對小信號穩定測向的能力。
3.2.1 測試系統結構
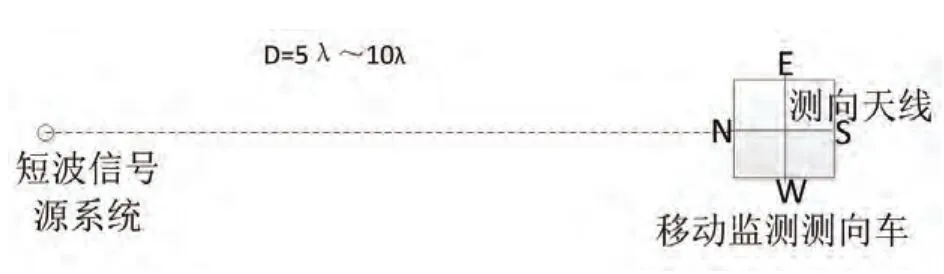
圖2 測試系統結構圖
3.2.2 測試步驟
(1)按1MHz的頻率間隔選取頻率f(避開干擾)共27個,形成測試頻率列表。
(2)被測系統參數設置建議:自動增益控制AGC為開,設置衰減為0,測向平均時間為1s,測向帶寬設置為1kHz,實時中頻帶寬為系統提供的最小值。
(3)設置信號源發射頻率為當前測試頻率f,發射輸出為標準單載波信號,調整其輸出功率,使被測系統監測到的信噪比≥20dB,測向質量精度≥95%,并且示向度穩定,記錄此時的示向度θ。
(4)逐步減小發射系統輸出功率,直到示向度90%偏離θ,且方向波動角度達到б時(б一般取±3°),此時被測系統信號場強值即為系統在該頻點的測向靈敏度,記錄測試數據。
(5)根據測試頻率列表改變頻率,重復(3)~(4),直至完成所有頻率的測試。
3.2.3 測試數據記錄及結果
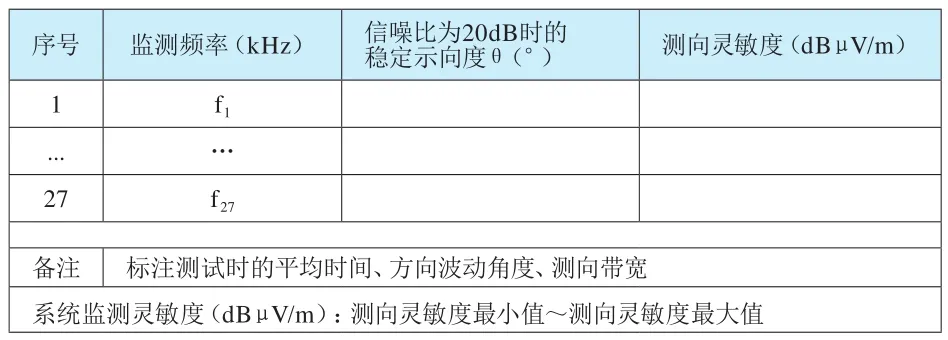
表2 系統測向靈敏度測試數據表
可將表2中的測量數據生成系統監測靈敏度曲線圖,形式如圖3所示:
圖3 系統測向靈敏度曲線圖
3.3 系統測向最小持續時間測試
通過測試移動監測測向系統完成準確測向時所需要的信號最短存在時間,用以標稱系統對瞬時信號的捕獲和測向能力。
3.3.1 測試系統結構(圖2)
3.3.2 測試步驟
(1)按5MHz的頻率間隔選取頻率f(避開干擾)共6個,形成測試頻率列表。
(2)被測系統參數設置建議:自動增益控制AGC為開,衰減為0,測向帶寬為1kHz,實時中頻帶寬為系統提供的最小值。
(3)設置信號源發射頻率為當前測試頻率f,發射輸出為標準單載波信號,調整其輸出功率,使被測系統監測到的信噪比≥20dB,且示向度穩定(測向質量精度≥95%)。
(4)保持發射功率和頻率不變,使用信號源發射脈沖寬度為ι(ι為系統測向最小信號時長標稱值的一半),脈沖周期為10ι的脈沖信號,在保持占空比1∶9的情況下逐步增加信號源脈沖寬度,直到被測系統能夠準確穩定地給出示向度(測向質量精度≥95%),此時脈沖寬度ι′即為系統在此頻率上的測向最小信號時長,記錄測試數據。
(5)根據測試頻率列表改變頻率,重復(3)~(4),直至完成所有頻率的測試。
3.3.3 測試數據記錄及結果
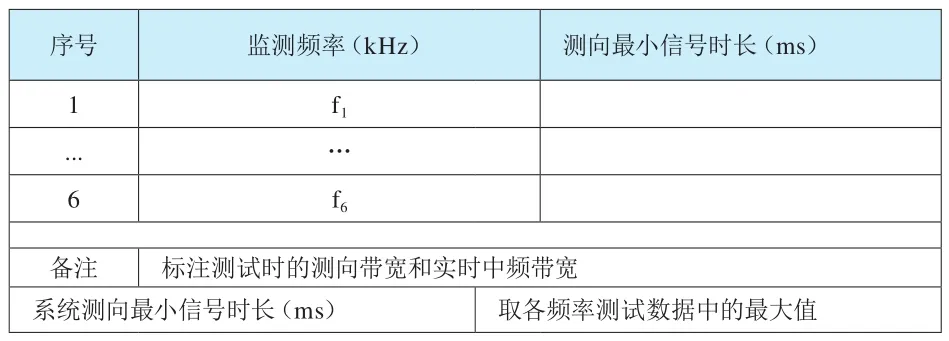
表3 系統測向最小信號時長測試數據表
4 結束語
本文介紹了短波監測測向車測向性能指標的測試方法,可作為監測車改裝驗收、維護檢查、定期校準的技術參考。
[1] 張洪順,王磊.無線電監測與測向定位[M].西安:西安電子科技大學出版社,2011
[2] ITU-R SM.2125-1建議書.高頻/甚高頻/特高頻監測接收機和電臺的參數和測量程序
[3] ITU-R SM.377-4 建議書.國際監測站頻率測量的精確度
[4] 朱慶厚.接收機無互調和無虛假響應動態范圍.中國無線電,2008.11
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
