迭代法在導管架三維建模中的應用
2015-05-03 02:04:54張建萍艾紹武李世森
船海工程 2015年1期
關鍵詞:程序
許 星,蔣 軍,張建萍,艾紹武,李世森
(深圳赤灣勝寶旺工程有限公司,廣東 深圳 518068)
迭代法在導管架三維建模中的應用
許 星,蔣 軍,張建萍,艾紹武,李世森
(深圳赤灣勝寶旺工程有限公司,廣東 深圳 518068)
針對導管架建模過程中斜拉筋管位置不易確定的問題,在理論分析的基礎上建立相應的數學模型,利用迭代法進行求解定位。利用Autolisp語言進行二次開發,編寫出相應的繪圖程序。結果表明:迭代法能快速準確地定位出斜拉筋的位置,利用相應的繪圖程序能極大地提高建模效率。
導管架;三維建模;迭代法;Autolisp
導管架加工設計是在詳細設計的基礎上進行結構加工設計及建造工藝方案設計[1-3]。在進行結構加工設計時,建立導管架的三維模型是首要步驟,是后續制作料單及單件圖等文件的基礎。在建模過程中,影響效率的主要因素是斜拉筋的定位。因為斜拉筋不同于其他桿件,其中心線的兩端位置并沒有直接給定,而是需要由其與附近拉筋管腳印之間的間隙來確定。當拉筋管兩端連接的管件在同一平面內時,管兩端位置可以利用幾何方法畫出;但若出現異面情形,管的定位就會非常繁瑣,且無法利用幾何方法精確畫出。無論哪種情形,斜拉筋定位都沒有做到快速準確。鑒于目前這方面的研究文獻非常少,針對斜拉筋定位問題,建立相應的數學模型,并通過理論分析結合迭代法提出一種可行的定位方法。同時利用AUTOLISP二次開發語言編寫出相應的程序,從而實現拉筋管的快速定位,節省工作時間,提高工作效率。
1 數學模型
以導管架立片上的斜拉筋為例,見圖1,導管架共有3個水平層,水平層中間依靠斜拉筋支撐。建模時,斜拉筋的定位依靠自身和相鄰支管在主導管腿(主管)上腳印之間距離來確定,該距離用G表示。為簡化問題,選取斜拉筋考慮,見圖2。
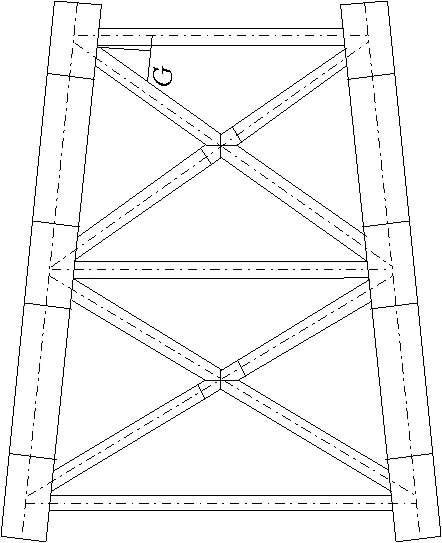
圖1 導管架立片

圖2 斜拉筋模型
斜拉筋右上角主管與水平支管交點設為A,主管上任取一點A1,支管上任取一點A2,主管、水平支管、斜拉筋外徑為DA1、DA2、DAB,主管與支管、斜拉筋的夾角分別為α、α1。左端情形類似。
設斜拉筋中心線兩端與主管的交點分別為A0、B0,令a=AA0,b=BB0。那么,斜拉筋定位等同于求a與b的過程。
由圖2可見,點A0或B0的位置變化都會影響到另一端焊根間隙G的大小,因此a與b并非獨立,求解這兩個未知數至少需要借助于數學模型建立兩個方程聯立求解。
圖2中斜拉筋右上角支管、斜拉筋中心線與主管外皮交點分別設為E、F。則距離EF在主管輪廓線上可以表示為
(1)
分別過E、F作主管中心線上的垂線,則距離EF在主管中心線上可以用下式表示
(2)
合并式(1)、式(2)可得
(3)
同理,斜拉筋左下角有如下方程成立。
(4)
式(3)與(4)中夾角α=∠A1AA2,β=∠B1BB2分別由點A、A1、A2和點B、B1、B2惟一確定;夾角α1=∠A1A0B0,β1=∠B1B0A0依賴于點A0、B0的位置,是關于a和b的表達式。因此,式(3)與(4)就是建立的關于a和b的兩個方程,通過求解由式(3)和(4)所組成的方程組就能得到a、b值。
2 迭代法求解
式(3)與(4)的形式決定了該方程組難以利用解析法求解。觀察式(3)與(4)不難發現,方程右側未知數a和b都單獨作為一項,因此利用數值解法中的迭代法來求解該方程組。將式(3)與式(4)分別表示如下。
(5)
(6)
再將式(5)與式(6)改寫為
(7)
(8)
由以上兩方程就可以進行迭代法求解:選取初值a0和b0,代入式(7)和(8)右端,求出第一次迭代后的結果a1和b1;再將a1和b1作為迭代初值代入公式右端進行迭代計算,如此反復。迭代n次后得到的值為
an=g1(an-1,bn-1)
(9)
bn=g2(an-1,bn-1)
(10)
只要迭代法收斂,那么隨著迭代次數的增加,迭代所得到的值就會不斷接近于方程的真實解。一般來說,為了提高效率,當an和bn在達到一定的精度之后就應該通過設立終止條件來停止迭代過程。例如,若要求a和b的精度均不低于小數點后3位,則迭代終止條件可設置為
max{|an-an-1|,|bn-bn-1|}≤10-4
(11)
當滿足精度要求時,可以認為a=an,b=bn。迭代法的收斂性與初值的選取有關,由于a和b值的大小一般比較小,因此將初值選為0最為合適。經過實際的驗證,在精度要求為小數點后3位時,初值為0的情況下,一般迭代3次就能達到要求,說明該迭代法具有很好的收斂性。
以上的模型及理論分析都是在主管、支管和斜拉筋在同一平面內完成的。事實上,斜拉筋左、右端節點處的分析都是相對獨立的,方程組中單個方程的獲得也不會因為異面而發生變化。惟一有區別的是G值,同一平面情形時,G值即是斜拉筋管與支管腳印之間的最近距離;而異面情形下G值則是斜拉筋管與支管腳印在主管與支管所構成的平面上投影的最小距離,這一距離要比腳印之間的最小距離略大,在規范中一般要求G值不能小于某個值,因此利用該方法定位的異面斜拉筋完全滿足建造規范的要求。
3 AUTOLISP程序實現及討論
將迭代法運用到實際的建模中,還需要借助于相關的編程技術,AUTOCAD軟件本身自帶的AUTOLISP二次開發技術是一種非常好的選擇[4-6]。圖3所示的是該方法的AUTOLISP程序的主要流程。
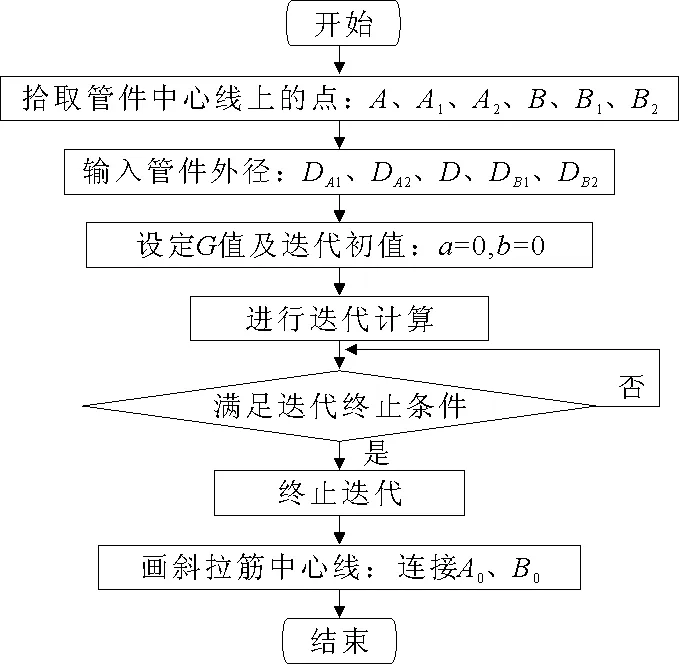
圖3 程序實現流程
程序算法的編寫應能考慮在實際應用中會遇到的各種情形,因此不應局限于前文所給出的單一模型和理論分析。
由于導管架形式的多樣性,有些斜拉筋一端位置已經確定,針對這種情況,編寫算法時僅需求解一端位置。此外程序在執行過程中選取主管上任意點A1、B1時,很難保證每一次都按照數學模型中的相對位置來選取,選取位置不同會導致公式中一些三角函數的正負發生變化。圖2中,若A1點選在A點的上方、B1點選在B點的下方時,α和β由鈍角變為銳角,α1和β1則由銳角變為鈍角。此時,方程(3)與(4)將會變成如下形式。
(12)
(13)
還有一點值得注意,a和b值有正負之分,在選定點A1和B1之后,若a和b值為正,待求點A0、B0和A1、B1在同側,反之在另一側。因此在求得a和b值之后應根據其正負準確地計算出待求點A0、B0的坐標。程序在編寫時應考慮以上情況,確保程序能正確運行并準確畫出斜拉筋的位置。
4 結論
1)數值分析方法在工程建模中的應用非常廣泛,比如插值法、擬合法在船體建模中都起到了至關重要的作用[7-9],但將迭代法應用于結構線模型的定位還鮮有報道。利用迭代法對導管架斜拉筋進行定位,能很好地解決建模過程中出現的桿件不易定位的問題,速度快、精度高,為后面開發導管架加工設計系統軟件打下了基礎。
2)從原理上看迭代法是計算機進行的一次次調試,但效率遠遠高于人工建模,因此在結構設計建模中有很大的應用價值。
3)文中僅針對個例進行理論分析和計算,在實際建模過程中仍有許多情形無法用這一方法解決,因此還需要做進一步的調查和研究。
[1] 孔祥鼎,夏炳仁.海洋平臺建造工藝[M].北京:人民交通出版社,1993.
[2] 安延濤,馬汝建.海洋平臺相似模型設計及模態實驗分析[J].船海工程,2009,38(03):122-127.
[3] 蘇 健,曾令青,高 陽,等.一種海洋鋼結構三維加工設計新策略[J].化學工程與裝備,2014,3:10-112.
[4] 劉 峻,朱敏紅.基于AutoLISP的AutoCAD程序參數化繪圖研究[J].機械制造與自動化,2010,39(5):12-114.[5] 朱曉軍,王 鵬,彭 飛.船體外形的CATIA建模方法[J].船海工程,2013,42(2):13-15.
[6] 陶曉環,白素蘭,陳 凱.VB與AutoCAD二次開發在海工建模中的應用[J].船海工程,2012,41(6):89-93.
[7] 周學軍,王瑛劍,伍先俊,等.一種精確海纜鎧裝鋼絲幾何建模法探討[J].武漢理工大學學報,2009,31(15):80-83.
[8] 李寶清,賈安東.海洋工程結構中多管-板相貫的求交算法[J].中國造船,2000,41(4):52-57.
[9] 陳 軍.海洋石油平臺模型導管架異面直線相關參數的計算[J].中國海上油氣,2004,16(3):203-205.
Application of Iteration Method in 3-D modeling of the Jacket
XU Xing, JIANG Jun, ZHANG Jian-ping, AI Shao-wu, LI Shi-sen
(Shenzhen Chiwan Sembawang Engineering Co. Ltd., Shenzhen Guangdong 518068, China)
For the problem that oblige pipe cannot easily located in jacket 3-D modeling, a mathematic model is built and an iteration method is used for the location of the pipe based on the theoretical analysis. A program is composed using the Autolisp programming languages. The results shows that iteration method locates the position of oblige pipe precisely and the program has greatly improved productivity in jacket 3-D modeling.
jacket; 3-D modeling; iteration method; Autolisp
10.3963/j.issn.1671-7953.2015.01.039
2014-10-21
許 星(1987-), 男, 碩士, 工程師
TG441
A
1671-7953(2015)01-0155-03
修回日期:2014-10-31
研究方向:海洋工程加工設計智能化
E-mail:xux729@163.com
猜你喜歡
電腦愛好者(2020年6期)2020-05-26 09:27:33
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
信息安全與通信保密(2016年3期)2016-08-23 01:23:56
山西省政法管理干部學院學報(2016年2期)2016-07-31 18:19:34
山西省政法管理干部學院學報(2016年2期)2016-07-31 18:19:25
中國衛生(2015年3期)2015-11-19 02:53:32
政治與法律(2014年11期)2014-03-01 02:20:40