基于ADAMS和AMESim機液聯(lián)合仿真的電動輪礦用車轉(zhuǎn)向機構(gòu)動力學(xué)研究
2015-04-26 08:24:38姜立標(biāo)程鋮何華劉堅雄
機床與液壓 2015年3期
姜立標(biāo),程鋮,何華,劉堅雄
(華南理工大學(xué)機械與汽車工程學(xué)院,廣東廣州 510640)
0 前言
220 t電動輪礦用自卸車轉(zhuǎn)向系統(tǒng)是全液壓控制系統(tǒng),包含機械和液壓兩大部分。目前針對轉(zhuǎn)向機構(gòu)的研究多數(shù)只是從機械動力學(xué)、運動學(xué)或者液壓建模等方面進(jìn)行獨立仿真,比較缺乏在機液聯(lián)合仿真方面的研究。文中利用ADAMS軟件進(jìn)行轉(zhuǎn)向系統(tǒng)動力學(xué)仿真,建立四輪二自由度動力學(xué)模型分析220 t電動輪礦用自卸車的穩(wěn)態(tài)轉(zhuǎn)向特性;應(yīng)用AMESim軟件建立液壓控制系統(tǒng)模型,分析轉(zhuǎn)向油缸、橫拉桿的受力狀況。運用兩者的軟件接口技術(shù)建立針對220 t電動輪礦用自卸車轉(zhuǎn)向系統(tǒng)的機液聯(lián)合仿真模型,實現(xiàn)液壓控制和機械動力學(xué)仿真的聯(lián)合研究。
1 礦用車轉(zhuǎn)向系統(tǒng)機液聯(lián)合建模
1.1 220 t礦卡全液壓轉(zhuǎn)向系統(tǒng)裝配模型
作者采用CATIA建立轉(zhuǎn)向系統(tǒng)各部件的三維模型,包括轉(zhuǎn)向節(jié)、橫拉桿和轉(zhuǎn)向油缸,在ADAMS/Car模塊中裝配,其裝配模型如圖1所示。
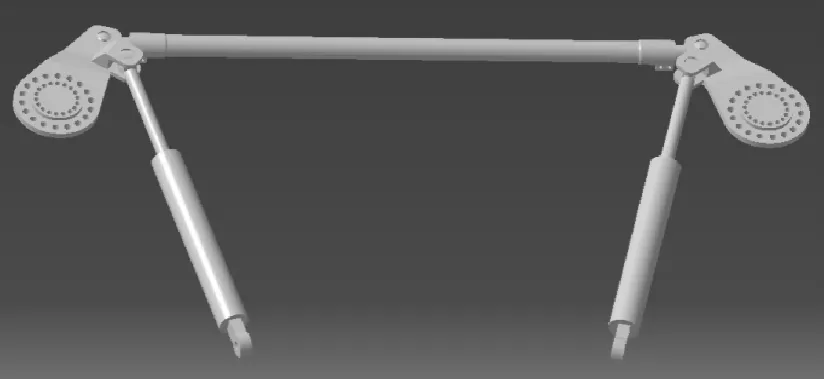
圖1 220 t礦卡全液壓轉(zhuǎn)向系統(tǒng)裝配模型
1.2 220 t電動輪礦用自卸車裝配建模
在ADAMS/Car模塊中建立輪胎UA模型、前懸架-轉(zhuǎn)向系統(tǒng)模板、后懸架系統(tǒng)模板以及車身總成系統(tǒng)模板,并裝配成整車,如圖2所示。
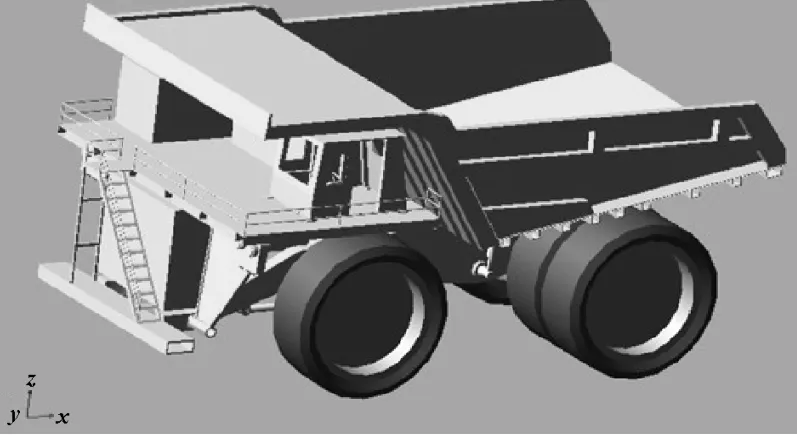
圖2 220 t電動輪礦用自卸車裝配模型
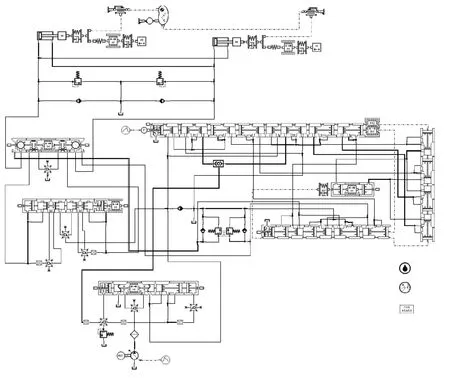
圖3 220 t礦卡全液壓轉(zhuǎn)向系統(tǒng)動態(tài)模型
1.3 220 t礦卡全液壓轉(zhuǎn)向系統(tǒng)動態(tài)建模
轉(zhuǎn)向系統(tǒng)的組成部分除了流量放大器和全液壓轉(zhuǎn)向器外,還有轉(zhuǎn)向泵、管路、油液、轉(zhuǎn)向機構(gòu)、油箱、單向閥、阻尼孔等液壓元件,直接調(diào)用AMESim軟件標(biāo)準(zhǔn)庫中相應(yīng)的液壓元件,并進(jìn)行組裝、設(shè)置參數(shù),得到如圖3所示的220 t電動輪礦用自卸車全液壓轉(zhuǎn)向系統(tǒng)的動態(tài)仿真模型。
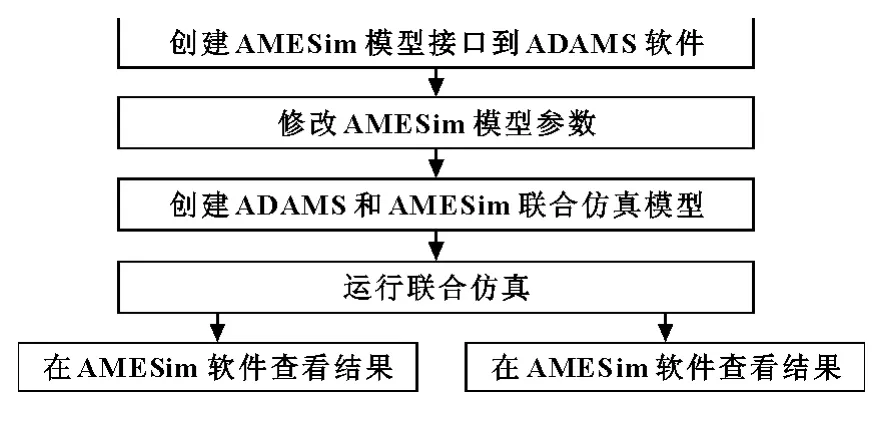
圖4 220 t礦卡全液壓轉(zhuǎn)向系統(tǒng)動態(tài)模型
1.4 220 t礦卡全液壓轉(zhuǎn)向系統(tǒng)機液聯(lián)合建模
將ADAMS機械模型和AMESim液壓控制模型通過接口技術(shù)進(jìn)行無縫整合,實現(xiàn)220 t電動輪礦用自卸車轉(zhuǎn)向系統(tǒng)的機械動力學(xué)模型與液壓系統(tǒng)模型的聯(lián)合數(shù)據(jù)交換,實現(xiàn)數(shù)據(jù)同步交流。聯(lián)合仿真的過程可以用圖4表示。其中,AMESim軟件輸出轉(zhuǎn)向油缸的力作為ADAMS軟件的輸入,ADAMS軟件輸出轉(zhuǎn)向油缸的速度和位移作為AMESim軟件的輸入。
2 四輪車輛二自由度轉(zhuǎn)向模型
轉(zhuǎn)向分析中,著重研究整車橫擺運動以及側(cè)向運動,針對220 t電動輪礦用自卸車的真實情況建立四輪二自由度的轉(zhuǎn)向模型,如圖5所示。
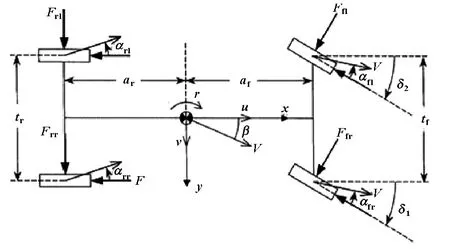
圖5 四輪車輛二自由度轉(zhuǎn)向模型
根據(jù)文獻(xiàn)[1-4],忽略懸架的影響并且將轉(zhuǎn)向中影響較小的后軸做相應(yīng)簡化。該模型與傳統(tǒng)的二自由度“自行車模型”相比,改善了后者忽略同軸車輪具有不同側(cè)偏角的缺陷。速度較低且轉(zhuǎn)向角很小時,同軸車輪的側(cè)偏角可以近似相等,但是在實際轉(zhuǎn)向分析中內(nèi)、外轉(zhuǎn)向輪的轉(zhuǎn)角是有差異的,內(nèi)輪轉(zhuǎn)角要比外輪轉(zhuǎn)角大;在中高速情況下,前軸左右輪胎的側(cè)偏角也不同,兩者的差角隨車速增大而增大[5]。
β為質(zhì)心側(cè)偏角:

質(zhì)心絕對加速度在y軸的分量為:

得到系統(tǒng)運動方程:
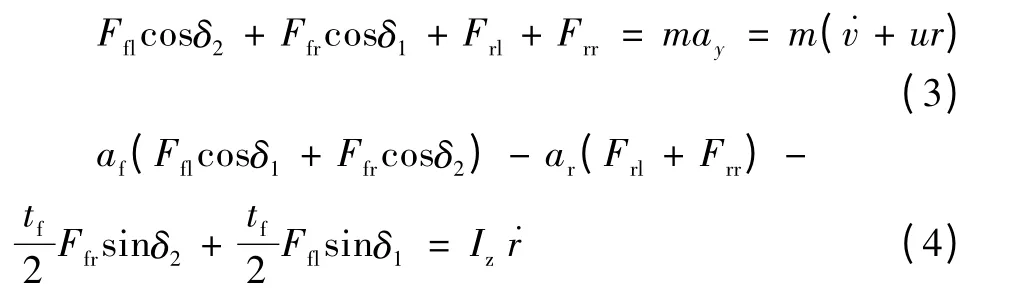
式中:r為質(zhì)心的橫擺角速度;af、ar分別為前、后軸到整車質(zhì)心的距離;F為輪胎側(cè)向力,tf、tr分別為前、后輪距;m、Ⅰz為整車質(zhì)量以及整車轉(zhuǎn)動慣量。
將(3)和(4)改寫成方程如下:

[6],單個輪胎側(cè)偏角的計算公式如下:
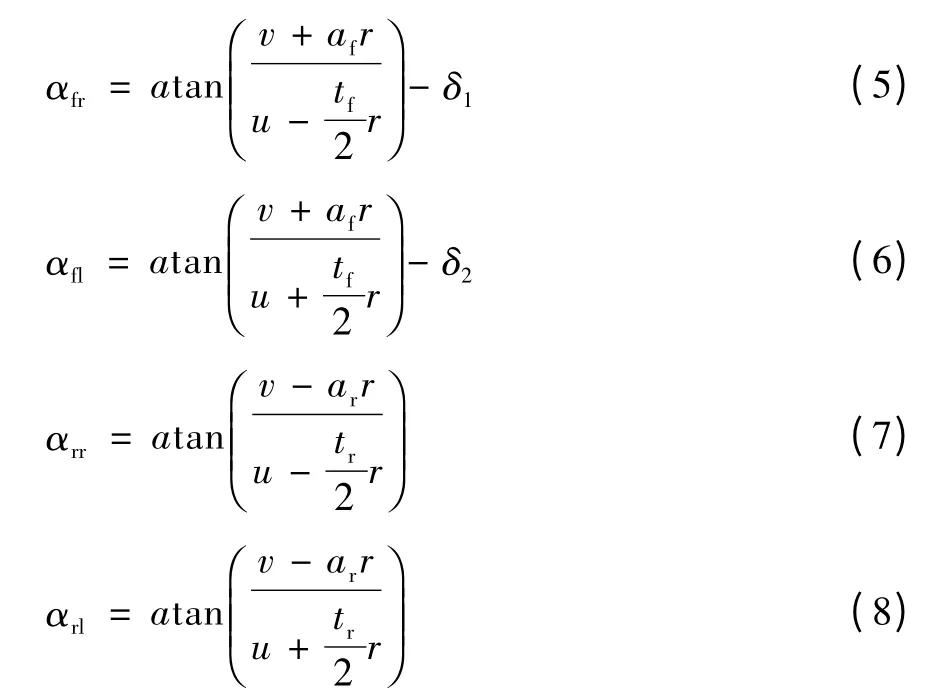
根據(jù)已知的輪胎側(cè)偏剛度與側(cè)偏角的大小,得到前后輪胎側(cè)向力分別為:

3 220 t礦用自卸車穩(wěn)態(tài)轉(zhuǎn)向分析
220 t電動輪礦用自卸車具有非常規(guī)車輛的自身質(zhì)量和規(guī)定載重,并且實際的工作環(huán)境極其惡劣,是搓板路、石子路等多種復(fù)雜路面的混合環(huán)境,對車輛的轉(zhuǎn)向穩(wěn)態(tài)特性要求較高。
3.1 車速和轉(zhuǎn)角階躍綜合影響
轉(zhuǎn)角階躍的主要影響因素包括:載重、車速和轉(zhuǎn)向角。文中將220 t電動輪礦用自卸車的行駛工況設(shè)定為滿載,主要分析車速和轉(zhuǎn)向角兩者對整車質(zhì)心橫擺角速度的綜合影響。將最大轉(zhuǎn)角階躍分為3組:5°、15°和30°,車速為0~18 m/s勻加速。
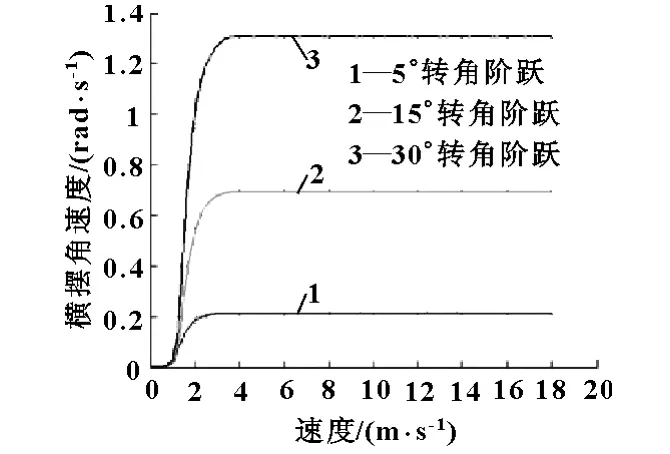
圖6 220 t電動輪礦用自卸車橫擺角速度隨車速關(guān)系
從圖6中可以看出,最大轉(zhuǎn)角階躍分別為5°、15°和30°的3組曲線在車速0~18 m/s范圍內(nèi)均可快速達(dá)到穩(wěn)定狀態(tài)。3條曲線的橫擺角速度達(dá)到穩(wěn)態(tài)值所對應(yīng)的車速分別為3 m/s、3.6 m/s和3.8 m/s,而整車質(zhì)心橫擺角速度穩(wěn)態(tài)值分別為0.21 rad/s、0.68 rad/s和1.32 rad/s。由此可得出以下結(jié)論:最大轉(zhuǎn)角階躍越大,整車質(zhì)心橫擺角速度達(dá)到穩(wěn)態(tài)值所用的時間越長;最大轉(zhuǎn)角階躍越大,系統(tǒng)達(dá)到穩(wěn)定狀態(tài)所對應(yīng)的橫擺角速度峰值也越大。
3.2 220 t礦卡不足轉(zhuǎn)向特性分析
利用1.3節(jié)中建立的220 t電動輪礦用自卸車裝配模型在ADAMS軟件中研究其轉(zhuǎn)向特性。如圖7所示,車輛轉(zhuǎn)向行駛軌跡為逆時針發(fā)散圓,其中設(shè)定車速為10 m/s,轉(zhuǎn)向角階躍為10°,理論穩(wěn)態(tài)轉(zhuǎn)向半徑為40 m。ADAMS軟件中得到的實際穩(wěn)態(tài)轉(zhuǎn)向半徑與理論轉(zhuǎn)向半徑比值如圖8所示,經(jīng)過短暫的過渡狀態(tài)之后比值穩(wěn)定在1.56。
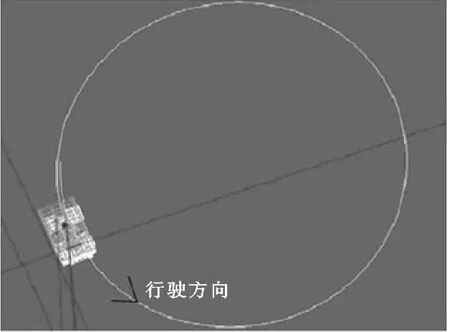
圖7 220 t電動輪礦用自卸車穩(wěn)態(tài)轉(zhuǎn)向行駛軌跡
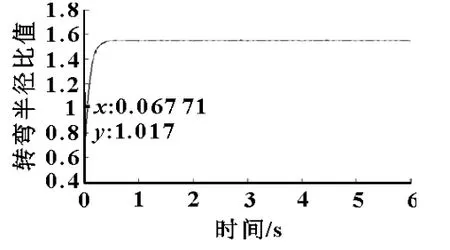
圖8 實際轉(zhuǎn)彎半徑與理論轉(zhuǎn)彎半徑比值
220 t電動輪礦用自卸車的穩(wěn)態(tài)轉(zhuǎn)向行駛軌跡、實際與理論轉(zhuǎn)向半徑比值大于1均可以說明車輛具有不足轉(zhuǎn)向特性。橫擺角速度可以快速地達(dá)到穩(wěn)態(tài)值,有較好的操縱穩(wěn)定性。
4 轉(zhuǎn)向油缸及橫拉桿受力分析
4.1 全液壓轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向油缸受力分析
為了獲取轉(zhuǎn)向油缸的壓力曲線,利用AMESim軟件對220 t電動輪礦用自卸車全液壓轉(zhuǎn)向系統(tǒng)施加方向盤轉(zhuǎn)角位移階躍和轉(zhuǎn)向盤轉(zhuǎn)速階躍并進(jìn)行仿真計算。在ADAMS軟件中測得整車原地轉(zhuǎn)向工況下,左右轉(zhuǎn)向油缸的受力情況如圖9所示,左缸以及右缸的最大受力分別為521 539 N和521 513 N,這一結(jié)果與轉(zhuǎn)向油缸設(shè)計最大推力521 540 N相近。
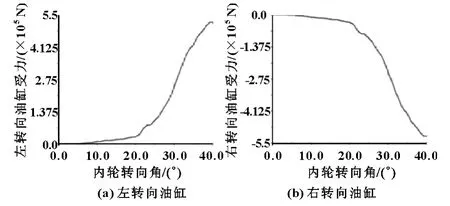
圖9 220 t電動輪礦用自卸車原地轉(zhuǎn)向時左右油缸推力
4.2 原地轉(zhuǎn)向橫拉桿受力分析
220 t電動輪礦用自卸車原地轉(zhuǎn)向橫拉桿受力分析包括兩種工況:空載和滿載。由圖10可看出,滿載和空載兩種狀態(tài)下轉(zhuǎn)向橫拉桿隨轉(zhuǎn)向角變化的趨勢基本相同,只是前者橫拉桿的受力要增加100N左右,詳見圖10中放大圖框,載荷增大導(dǎo)致轉(zhuǎn)向橫拉桿的受力增大與實際情況相符。
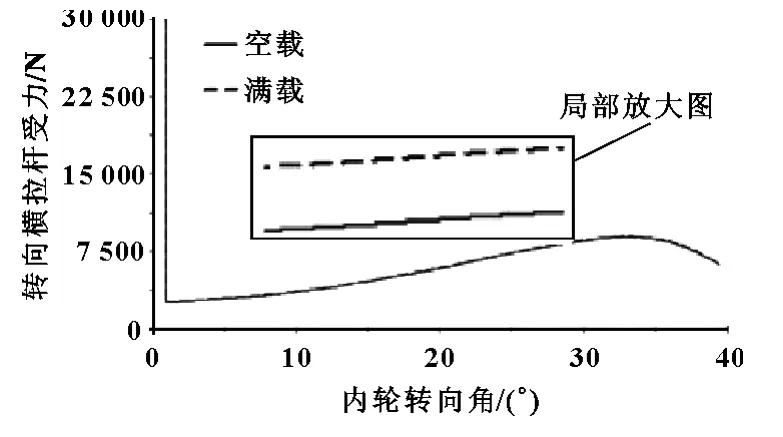
圖10 220 t礦卡滿載和空載原地轉(zhuǎn)向橫拉桿受力
整個轉(zhuǎn)向過程中,橫拉桿受力變化范圍為2 588~8 915 N。初期發(fā)生受力突變、橫拉桿受力產(chǎn)生沖擊的原因有:轉(zhuǎn)向球銷有間隙;轉(zhuǎn)向角階躍使轉(zhuǎn)向輪的轉(zhuǎn)向速度產(chǎn)生突變等。橫拉桿受力隨著轉(zhuǎn)向角的增大而增大,峰值受力發(fā)生在內(nèi)輪轉(zhuǎn)角為32°時,之后橫拉桿受力開始減小。說明內(nèi)輪轉(zhuǎn)向角是32°時轉(zhuǎn)向橫拉桿的轉(zhuǎn)向力臂達(dá)到最小、受力達(dá)到最大。
4.3 滿載行駛轉(zhuǎn)向橫拉桿受力分析
220 t電動輪礦用自卸車滿載轉(zhuǎn)向行駛工況時。轉(zhuǎn)向橫拉桿的受力出現(xiàn)較大波動的情況,如圖11所示。在內(nèi)輪轉(zhuǎn)向角0~40°的變化范圍內(nèi),橫拉桿由于受到地面的沖擊導(dǎo)致受力波動較大,受力值比原地轉(zhuǎn)向大得多,所以轉(zhuǎn)向橫拉桿受力最復(fù)雜最危險的工況是行駛轉(zhuǎn)向,設(shè)計時必須考慮動態(tài)受力。
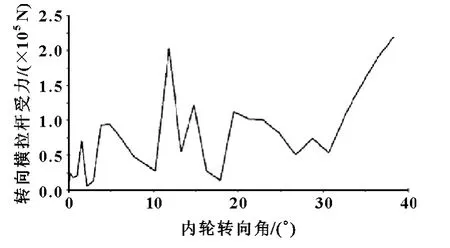
圖11 220 t電動輪礦用自卸車滿載行駛轉(zhuǎn)向橫拉桿受力
5 結(jié)論
在整車全液壓轉(zhuǎn)向系統(tǒng)機液聯(lián)合模型的基礎(chǔ)上,進(jìn)行了動力學(xué)仿真。首先建立了更符合220 t電動輪礦用自卸車實際情況的四輪二自由度模型,分析了220 t電動輪礦用自卸車穩(wěn)態(tài)轉(zhuǎn)向:在轉(zhuǎn)向階躍角變大且車速增加的情況下,整車橫擺角速度隨轉(zhuǎn)向角的增大達(dá)到穩(wěn)定狀態(tài)所對應(yīng)的車速略有增加,符合實際行車狀況;在ADAMS中220 t電動輪礦用自卸車穩(wěn)態(tài)轉(zhuǎn)向行駛軌跡呈現(xiàn)不足轉(zhuǎn)向特性,這與實際轉(zhuǎn)向半徑和理論轉(zhuǎn)向半徑比值大于1的仿真結(jié)果相吻合。仿真結(jié)果驗證了所研發(fā)樣車具有不足轉(zhuǎn)向特性,操縱穩(wěn)定性較好。利用聯(lián)合仿真模型進(jìn)行220 t電動輪礦用自卸車全液壓轉(zhuǎn)向系統(tǒng)的原地轉(zhuǎn)向仿真,轉(zhuǎn)向油缸受力和實際參數(shù)基本吻合,全液壓轉(zhuǎn)向系統(tǒng)的設(shè)計滿足了整車轉(zhuǎn)向時轉(zhuǎn)向油缸的最大推力限制;最后分析了轉(zhuǎn)向橫拉桿在3種不同工況下的受力情況,滿載與空載時的轉(zhuǎn)向橫拉桿受力差值在100 N左右,基本消除了由于載荷變化時轉(zhuǎn)向橫拉桿受力變化較大導(dǎo)致縮短橫拉桿正常使用壽命的現(xiàn)象。綜上所述,文中所設(shè)計的220 t電動輪礦用自卸車全液壓轉(zhuǎn)向系統(tǒng)符合實際要求,并為基于機液聯(lián)合模型的轉(zhuǎn)向系統(tǒng)設(shè)計提了一定的實踐基礎(chǔ)。
參考文獻(xiàn):
[1]GHAFFARI A,AHMADI J,KAZEMI R.Fuzzy Logic Based Vehicle Stability Enhancement Through Active Rear Steering[J].ASME Paper No.DETC2005-85350.
[2]DAI L,HAN Q.Stability and Hopf Bifurcations of a Nonlinear Model for a Four-Wheel-Steering Vehicle System[J].Commun.Nonlinear Sci.Numer.Simul,2004:331-341.
[3]LIU L,PAYREM G.Global Bifurcation Analysis of a Nonlinear Road Vehicle System[J].ASME J.Comput.Nonlinear Dyn,2007,2(4):308-315.
[4]SHEN S,WANG J,SHI P,et al.Nonlinear Dynamics and Stability Analysis of Vehicle Plane Motions[J].Veh.Syst.Dyn,2007,45(1):15-35.
[5]楊啟梁.四輪車輛二自由度轉(zhuǎn)向模型研究[J].機械與電子,2007(8):71-73.
[6]NGUYEN V.Vehicle Handling,Stability,and Bifurcation Analysis for Nonliner Vehicle Models[D].MSthesis,University of Maryland,College Park,MD,2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 機床與液壓的其它文章
- Manufacturing of self-lubricating diamond tools with Ni-Cr alloy adding with Ni/C
- Vibration response analysis of a lathe spindle by using the ANSYS finite element method
- Car following model with consideration of the vehicle’s mechanical inertia effect and its stability analysis
- Software design for spur gear tooth thickness based on MATLAB/GUI
- Dynamic study on ultrasonic horn
- Analysis and research of OPC technology in coal mine monitoring data transmission system