基于遺傳算法的3-DOF并聯機床機構的結構參數優化
2015-04-26 08:24:08張虎郭志飛張錚徐安林
機床與液壓 2015年3期
關鍵詞:優化
張虎,郭志飛,張錚,徐安林
(1.無錫職業技術學院機械技術學院,江蘇無錫 214121;2.江蘇大學機械工程學院,江蘇鎮江 212013)
0 前言
并聯機床具有結構緊湊、動態特性好、剛度大等優點,其中三自由度并聯機床應用最為廣泛[1-3]。并聯機床機構的設計中,一般以機床的結構對稱性、工作空間、靈活度、速度與承載能力等作為評價指標。依據機構學相關理論,機床結構參數(如桿長、機床床身尺寸)直接影響上述指標,因此在選型結束后,需要對機床結構參數的進行優化[4-6]。
要獲得較大的工作空間、高靈活度等多個優化目標時,可將這一問題轉化成多目標優化問題。遺傳算法[7]非常適用于解決復雜非線性和多維空間最優解等問題,在計算科學、模式識別等方面有著廣泛應用。
本文作者是在選定3-P-(2U-2S)這一并聯機構構型后,以工作空間、運動特性作為評價指標,將機床床身半徑R、連桿桿長L作為優化設計參數,應用遺傳算法來實現3-P-(2U-2S)機床機構的優化設計。
1 并聯機床機構基本特征介紹
并聯機床機構結構簡圖如圖1。移動副作為機床的驅動副,通過伺服電機驅動3個滑塊沿導軌直線移動,進而帶動動平臺實現三自由度平動,從而改變激光光頭的位置參數,與激光系統配合后,可實現三自由度平動激光加工(激光切割或焊接)。

圖1 機床結構簡圖
2 并聯機床機構的位置方程
設定機架定平臺OPi=R,O'Ai=r桿長為L,機床位置結構簡圖如圖2所示。設定動平臺中心O'在靜坐標系O-XYZ下的坐標為(x,y,z),各滑塊點Bi在{O}坐標系內的坐標:
[Bi]o=(R cosαi-R sinαiZi)T
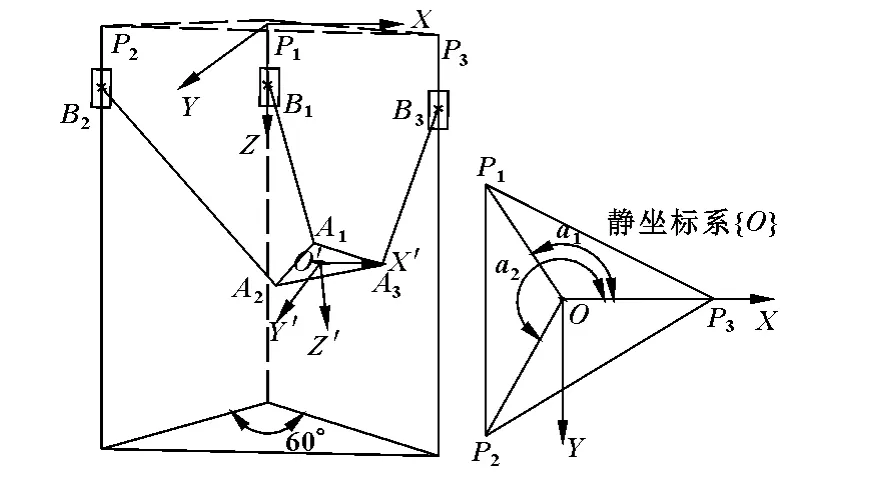
圖2 機床位置結構簡圖
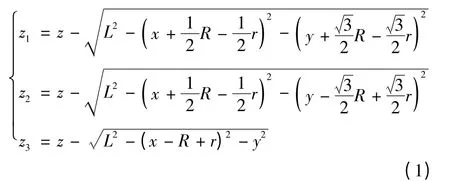
根據桿長約束方程可得到機床機構位置反解方程如下:
3 機床機構工作空間求解
并聯機床的工作空間求解,通用的方法一般可分為幾何解法和數值分析法。
數值分析法是根據約束條件(比如桿長約束、轉角約束),利用位置逆解來搜索邊界和工作空間的內部點集的方法。該方法得到的工作空間是空間點的集合,一般是通過計算機計算獲得,其優點在于程序化、可以通過改變相關參數,得到不同參數下的工作空間。取表1中的機床參數進行計算。
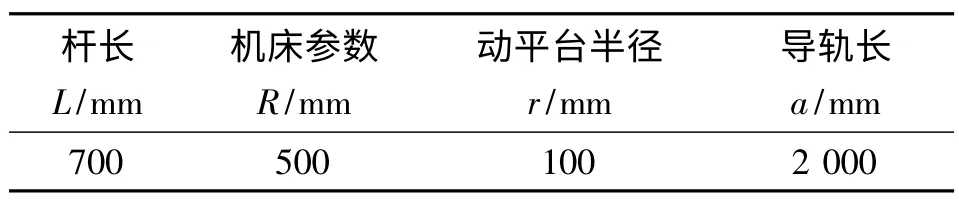
表1 機床結構參數
利用MATLAB計算得到工作空間和XOY方向投影的最大截面如圖3。

圖3 并聯機床工作空間與最大截面
同時,工作空間最大截面與機床結構參數的關系分析如下。
根據運動學原理,3個支鏈末端最大回轉工作空間的交集,即為工作空間的最大截面如圖4,3個圓的方程如下:
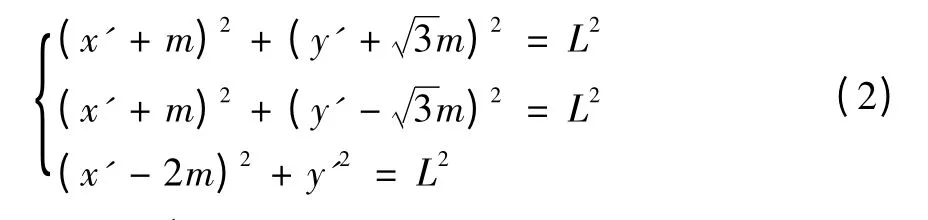
圖4 工作空間最大截面
最大截面面積Smax,經計算可得:
導軌長度一定時,Smax與工作空間大小成正相關。
4 機床機構運動學特性求解
由于機床機構具有三平動自由度,輸入與輸出均為線速度。設定輸入輸出速度矢量分別為vin,vout,得Jvin=vout,雅克比矩陣J反映了機床滑塊輸入運動與動平臺輸出運動的映射關系。
由式(1)可得到雅克比矩陣J如下:

得到:
設定κ(J)=cond(J)=‖J‖·‖J-1‖稱為雅克比矩陣條件數,反映了速度傳遞時的相對誤差可能的放大率[8]。
條件數的倒數,η(J)=1/κ(J),稱為線速度傳遞各向同性(LCⅠ),其值越大,則各項同性越好,速度傳遞性能在該點的傳遞性能越好,η(J)≤1,當η(J)=1,則各向同性處于最佳狀態。
應用MATLAB軟件求解η(J)=1/κ(J),得到LCⅠ。圖5是在LCⅠ在工作空間XOY面上的分布云圖與等高線圖。
從圖5中可以直觀地看出動平臺在機床中心附近時,機床的LCⅠ較高,沿中心向外圍擴散,即傳遞性能在機床機構中心最好,沿直徑方向逐漸變差。在中心區域300 mm×300 mm(XOY平面)內LCⅠ值較大,同時中心點與邊緣點的差值較小、分布均勻,說明機床加工工件時,運動的穩定性好。
另一方面,對于在規定工作空間W下的綜合運動學性能,可通過全局條件指標GCⅠ來表示:
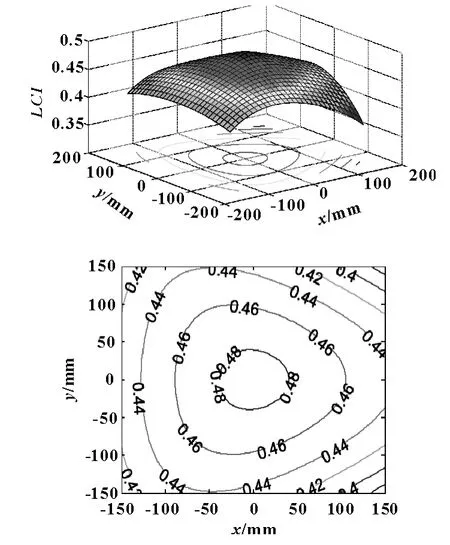
圖5 LCⅠ在分布云圖與等高線圖(R=500,L=700)
5 基于遺傳算法的機床機構參數優化
5.1 基本原理
遺傳算法[9]基于自然進化規則搜索和計算問題,能夠收斂得到全局最優解,基本操作包括選擇、交叉和變異。BP神經網絡算法有很強的映射能力,常常用于函數逼近、模式識別等。將遺傳算法與BP網絡算法結合,可以充分發揮神經網絡的泛化的映射能力。通過BP網絡算法構建目標函數模型,來作為遺傳算法的尋優函數。
5.2 具體步驟
設定機床機構參數半徑R、桿長L為變量,分別取范圍為L∈[700,800],R∈[500,600](單位:mm)。
通過求解規定的工作空間(300 mm×300 mm×Z)的全局條件指標GCⅠ值,比較優化機床機構參數。通過求解可以到不同組合L、R得到的離散點(L,R,GCⅠ),應用BP網絡算法構建映射關系構造目標函數,因此GCⅠ作為機床機構運動特性的評價指標;另一方面,取工作空間最大截面Smax可以作為工作空間的評價指標。
將上述兩種指標,構建評價函數通過“加權”的方式,來轉換成單目標優化問題,通過遺傳算法訓練,得到一組工作空間與GCⅠ值較好的組合解,從而將多目標優化轉換成單目標優化問題[97,104],其數學模型如下:

其中ω1、ω2是賦給工作空間與GCⅠ的權值,f1、f2是參照滿意度函數法[10]構造的對應于工作空間與GCⅠ的子函數,稱為評估函數。由于兩者均期望為最大值,函數定義的方法如下。
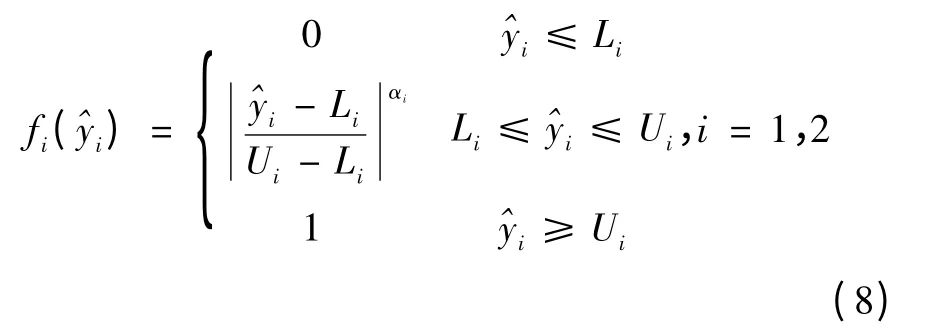
其中,是響應^yi是經GCⅠ或Smax得到的一個任意值,Ui對應最大值,Li對應最小值,αi是常數。這樣經過上述數值轉換后,工作空間與GCⅠ對應的的評估函數f1、f2的任意數值是fi(^yi),其大小在一個數量級,從而不會使工作空間與GCⅠ本身數值大小影響優化效果。設權值與參數值ω1=ω2=1,α1=α2=1。
采用MATLAB遺傳算法GAOT工具箱,作為求解最優值的求解工具。通過ga()相關語句,進行求優計算。經過100代的進化之后,得到最優值收斂于1.259 7。
5.3 優化結果
圖6是GCⅠ與工作空間在遺傳算法下的尋優性能跟蹤圖,圖中虛線代表適應度函數的最佳值(Best fitness)和實線代表平均值(Mean fitness)。
最優參數值為:L=796.56;R=570.57
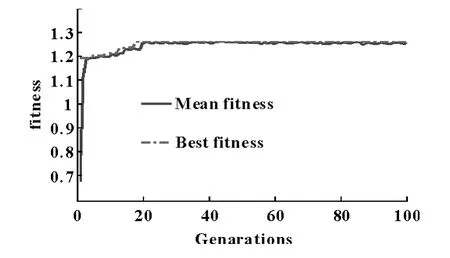
圖6 遺傳算法下的尋優性能跟蹤圖
將上述優化的機床機構參數尺寸代入到式(3),求解得到優化后的工作空間最大截面,如圖其面積為4.219 7e+005 mm2,優化后的LCⅠ在工作空間的分布如圖8。
分析圖3、5與圖7、8,說明優化后機床機構在保證工作空間下,運動特性條件指標得到了提高,這樣既能使并聯機床在工作空間上滿足加工要求,又能保證機床機構的運動學性能。綜上,文中的機床機構的參數優化基本完成,優化結果令人滿意。
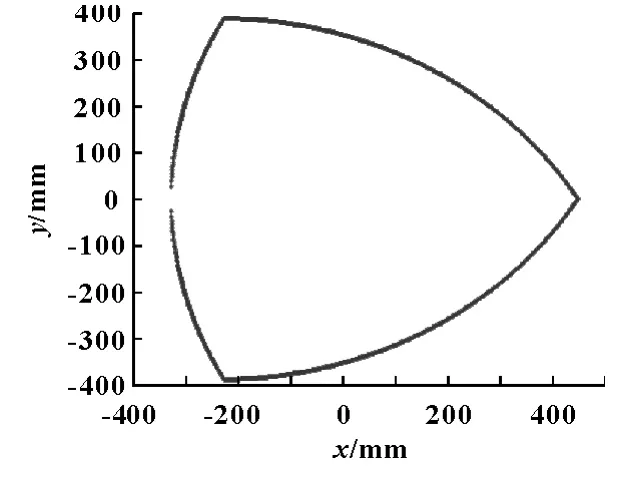
圖7 優化后,最大工作空間截面圖
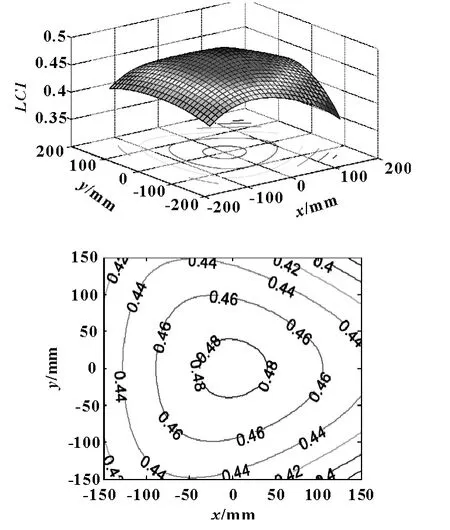
圖8 LCⅠ在優化后分布云圖與等高線圖
6 結論
通過計算給出了并聯機床機構3-P-(2U-2S)的反解方程,應用邊界搜索的方法得到機床機構的工作空間,接著通過雅克比矩陣的求解得到并聯機床機構的條件數方程。最后,應用BP網絡算法構建映射函數,通過遺傳算法對機床機構的結構參數(機床半徑R與桿長L)進行了尺寸優化。通過優化,并聯機床在工作空間和全局運動條件指標GCⅠ兩個綜合性能得到了提高。
[1]張曙,HEISEL U.并聯運動機床[M].北京:機械工業出版社,2003.
[2]COMPANY O,PIERROT F.Modelling and Design Issues of a 3-axis Parallel Machine-tool Original[J].Research ArticleMechanism and Machine Theory,2002,37(11):1325-1345.
[3]HUANGZ,LI QC.On the Type Synthesis of Lower-mobility Parallel Manipulators[C].Proceedings of workshop on fundamental issues and future research directions for parallel mechanisms and manipulators.Canada:Quebec,2002.
[4]ALTUZARRA Oscar,PINTO C,SANDRU B,et al.Optimal Dimensioning for Parallel Manipulators:Workspace,Dexterity,and Energy[J].Journal of Mechanical Design,2011(7):133-141.
[5]JAMWAL Prashant Kumar,XIE Shengquan,AW Kean C.Kinematic Design Optimization of a Parallel Ankle Rehabilitation Robot Using Modified Genetic Algorithm[J].Robotics and Autonomous Systems,2009,57(10):1018-1027.
[6]STOCK Michael,MILLER Karol.Optimal Kinematic Design of Spatial Parallel Manipulators:Application to Linear Delta Robot[J].ASME J,2003,125:292-301.
[7]高振.空間三自由度并聯,混聯機構構型、性能與若干應用研究[M].合肥:中國科學技術大學,2009.
[8]于靖軍,劉辛軍,丁希侖,等.機器人機構學的數學基礎[M].北京:機械工業出版社,2008.
[9]王小平,曹立明.遺傳算法—理論、應用與軟件實現[M].西安:西安交通大學出版社,2002.
[10]蒙哥馬利.驗設計與分析[M].傅玨生,等譯.北京:人民郵電出版社,2009.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45

- 機床與液壓的其它文章
- Manufacturing of self-lubricating diamond tools with Ni-Cr alloy adding with Ni/C
- Vibration response analysis of a lathe spindle by using the ANSYS finite element method
- Car following model with consideration of the vehicle’s mechanical inertia effect and its stability analysis
- Software design for spur gear tooth thickness based on MATLAB/GUI
- Dynamic study on ultrasonic horn
- Analysis and research of OPC technology in coal mine monitoring data transmission system