基于MIMO法的行星齒輪減速器的模態試驗
2015-04-26 08:07:51張坤于洋余曉輝
船舶力學 2015年11期
張坤,于洋,余曉輝
(中國船舶重工集團公司第七〇三研究所,哈爾濱150078;2海軍駐哈爾濱七〇三所軍事代表室,哈爾濱150078)
基于MIMO法的行星齒輪減速器的模態試驗
張坤1,于洋2,余曉輝1
(中國船舶重工集團公司第七〇三研究所,哈爾濱150078;2海軍駐哈爾濱七〇三所軍事代表室,哈爾濱150078)
針對行星齒輪減速器,采用MIMO方法進行模態試驗,將方案一(彈性繩懸掛)和方案二(彈性繩和充氣輪胎混合支撐)兩種形式下高頻信號和低頻信號得到的六組試驗數據用LMS模態分析軟件進行處理,得到七階模態頻率及其振型,及各階模態的模態質量、模態剛度和模態阻尼等信息。最后分別對兩種方案進行模態可信度和有效性分析,分析結果表明,兩種方案在模態參數估計上都能取得相對合理的結果,方案二在獲取低頻模態信息方面效果較好,而方案一在獲取高頻模態信息方面效果較好,具體應用時應根據所關心的頻段和模態參數選取不同方案的數據進行參考。
行星齒輪減速器;模態試驗;LMS;最小二乘復指數法
0 引言
模態參數對于機械系統的故障診斷、結構修改及優化設計、振動噪聲控制等領域有著廣泛的應用。目前,模態分析技術已日趨成熟和完善,各種試驗方法和處理手段越來越多,這對保證各種機械產品和工程結構的高性能指標、高使用安全性和高可靠性起著重要作用[1]。常用的試驗模態分析方法有SIMO、MISO和MIMO,其中SIMO為單輸入多輸出,即單點激勵多點響應,MISO為多輸入單輸出,即多點激勵單點響應,MIMO為多輸入多輸出,即多點激勵多點響應[2]。MIMO時域模態分析是測試模態參數比較理想的手段,與頻域模態分析相比,它有計算精度高,且不易丟失模態的優點[3]。為保證能激勵出行星減速器2 000 Hz內的所有固有頻率,試驗決定采用多輸入多輸出的模態參數識別方法,即MIMO方法。對于試驗模態分析,影響因素較多,邊界條件的設定,激勵點數量與布置位置的選擇,響應點數量與分布位置的選擇,激振力大小的確定等,都會給試驗模態帶來一定的難度。本次行星減速器模態試驗采用MIMO方法,在兩種支承形式下共采集到了六組試驗數據,經后續分析得到的模態參數可為行星減速器的應用提供指導,并可為今后的結構動力學改進設計提供參考依據。
1 模態試驗原理
基本原理是人為給機械加激振力,同時測出其響應。接著將信號經數據采集系統進行采樣,然后輸入到計算機,用分析軟件將數據經快速FFT變換,算出激振點與響應點的傳遞函數[4]。
模態分析計算如圖1所示。

圖1 模態分析計算原理圖Fig.1 Principle diagram of modal analysis
2 模態試驗內容
2.1 懸掛條件
使被測設備處于何種狀態是試驗準備工作的一個重要方面,較為常用的一種試驗狀態是自由狀態,即使試驗對象自由懸浮在空中。這種狀態下有六個剛體模態:三個平移模態和三個轉動模態。如有可能,應該使懸掛點盡可能靠近模態變形最小的節點。
為了使各組試驗所測的數據盡可能客觀地反映自由狀態下行星減速器的模態及振型,根據試驗件的結構特點,本試驗共設計兩套方案:
方案一:
采用彈性繩懸掛減速器,同時用尼龍繩對減速器進行保護。本方案沒有限制基座的側向位移,減速器處于完全自由狀態。試驗裝置如圖2,圖3所示。
方案二:
彈性繩和彈性橡膠墊(即充氣輪胎)的混合支承方案。把減速器放置在充氣輪胎上,可充分利用其彈性大并能較好控制重心偏移的優勢,同時采用彈性繩懸掛承載部分拉力,可幫助控制試驗過程中可能出現的減速器重心偏移、側向位移過大等問題。

圖2 懸掛及保護裝置實物Fig.2 Material object of suspension and protective device

圖3 方案一裝置效果圖Fig.3 Device effect picture of scheme 1
2.2 試驗設備
行星減速器頻響函數測量基本框圖如圖4所示。

圖4 頻響函數測量基本框圖Fig.4 Measure elemental box of frequency response function
由于本試驗的頻帶相對較寬,試驗共分低頻和高頻兩組帶寬進行。低頻組測試時帶寬設置為0~512 Hz,分辨率為0.25 Hz;高頻組帶寬設置為2 048~2 560 Hz,分辨率為0.312 5~0.5 Hz。由于試驗過程中主要干擾信號為高頻信號,而高頻組測試的結果同樣包含低頻信號成分,模態分析時可將低頻信號進行分離。本次試驗低頻組針對兩種支承方式各進行一組測試,高頻組針對兩種支承方式共進行四組測試。試驗在兩個激勵點各采用隨機激勵和猝發隨機激勵方式,原理如前所述。選擇保存頻響函數中的動態剛度和相關函數,經系統調試選取好量程后便可開始測量。
2.3 激振點位置選取和激勵方式選取
對于質量大的研究對象,單點激勵不能將完整的結構模態特性激勵出來,而多點激勵才能將結構的模態特性激勵出來[5]。為保證能激勵出2 000 Hz內的所有模態參數,試驗決定采用多輸入多輸出的模態參數識別方法MIMO法。激振器的激振點的選擇應遵循以下兩點:(1)選在剛度較大且便于激勵的地方;(2)應避開結構模態節點或者支撐點,因此不宜選在對稱的平面上[6]。同時試驗應當保證激振器能提供足夠的能量使各測試點所測得的信號有足夠大的信噪比,但又不至于由于激勵力過大而引起局部信號失真;同時還要考慮到激振器的安裝和固定等問題。試驗針對上述要求進行了大量測試,最終的激勵位置示意如圖5,圖6所示。選擇位于不同側的兩個位置進行激勵,可以保證能提供足夠的能量激勵出所有的模態,使各測點所測的信號具有較好的信噪比,又能避免由于激勵位置距離太近而引起靠近激振點位置處振動信號過大,而遠離激振點位置振動信號微弱的問題。同時對試件進行兩個方向的激勵,盡可能避免出現模態丟失現象。本試驗對象質量較大,激振器附加質量的影響可忽略不計。
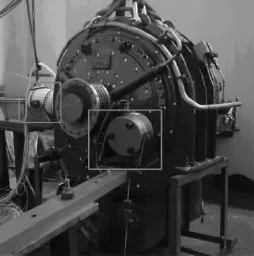
圖5 激振器位置簡圖Fig.5 Position sketch of vibration exciter
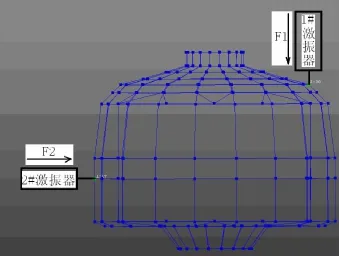
圖6 激振器位置模型示意圖Fig.6 Scheme of vibration exciter position model
2.4 模態試驗
方案一和方案二所采集得到的信號數據如表1和表2所示的結果。
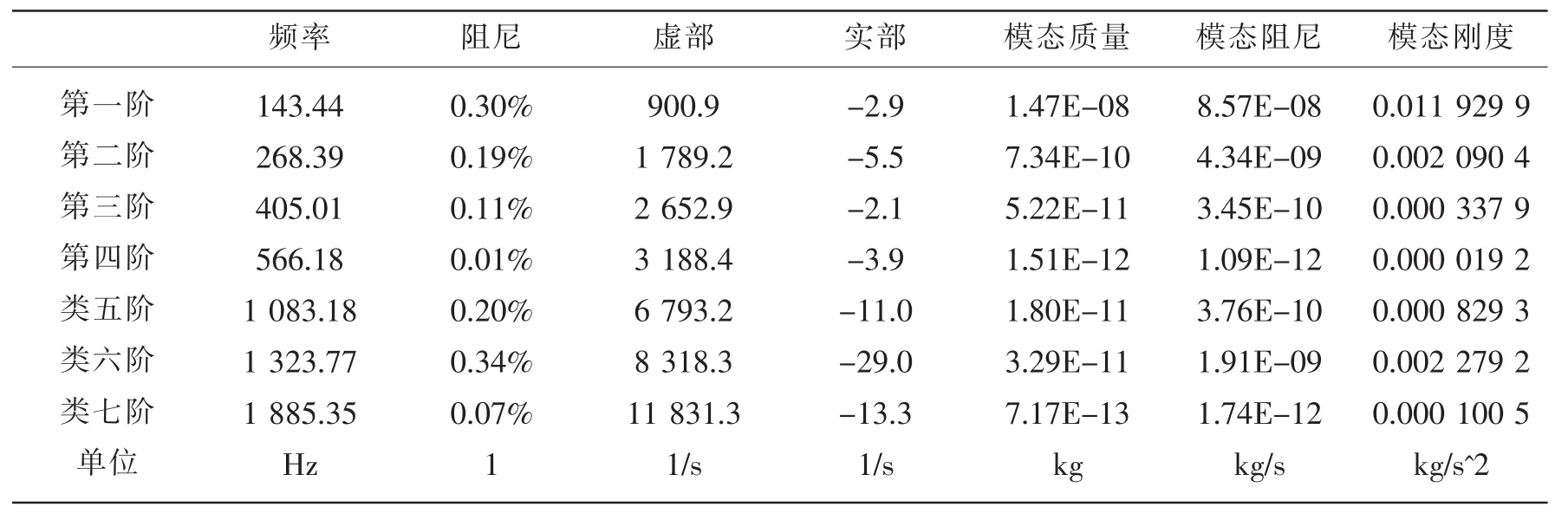
表1 由方案一所得模態參數Tab.1 Mode parameter of scheme 1
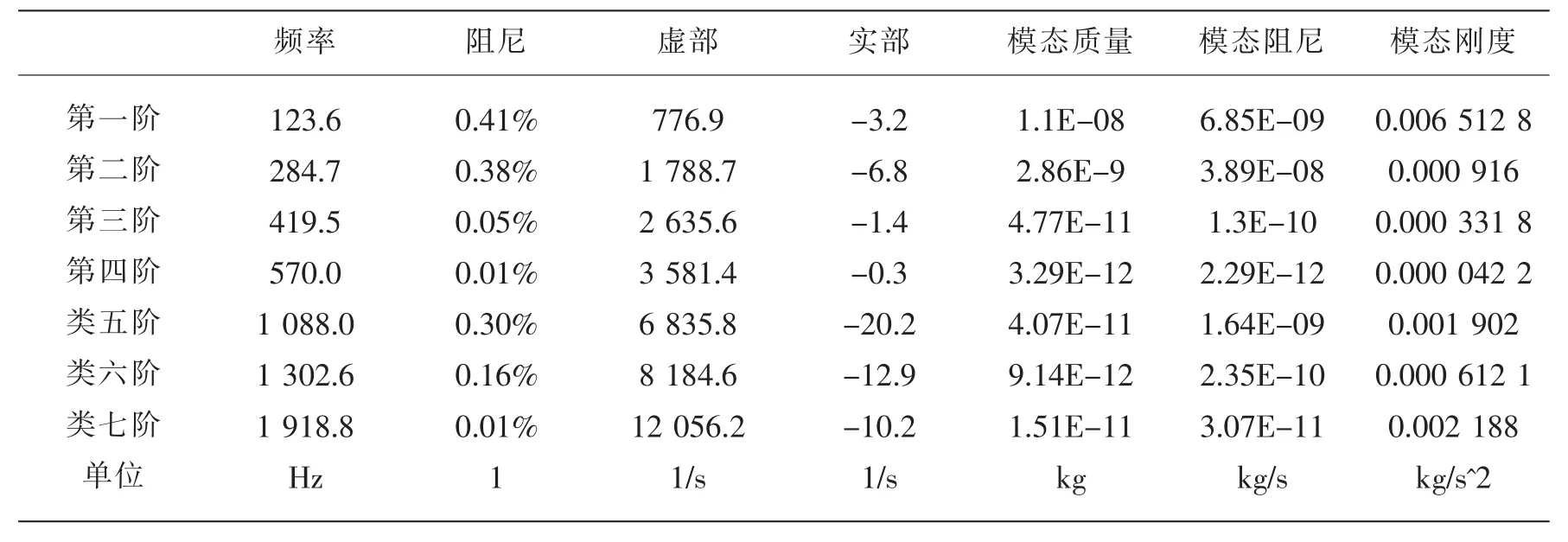
表2 由方案二所得模態參數Tab.2 Mode parameter of scheme 2
將計算得到的所有模態數據采用最小二乘法進行擬合,最終可得到表3-5的模態參數。

表3 行星齒輪減速器整體頻率Tab.3 Frequency of planetary gear reducer

表4 行星齒輪減速器整體阻尼Tab.4 Damp of planetary gear reducer

表5 行星齒輪減速器模態參數Tab.5 Mode parameter of planetary gear reducer
3 兩種方案模態可信度和有效性分析對比
3.1 方案一模態可信度分析
由模態分析理論可知,系統各模態間應相互正交,即任意兩組模態的相關系數為0。但由于試驗過程不可能在理論的假設條件下進行,所采集的信號將不可避免地偏離真實信號,這將直接導致試驗所得的結果與理論出現偏差。經過分析計算,方案一的自相關函數數據如表6所示。柱狀圖中對角線值為各階模態的自相關系數,由于是其自身的比較,故都為100%;柱狀圖各非對角線上的元素為各階模態之間的相關函數值,可以看出,低階模態間相似程度相對較高,高階模態間相似度較差,幾乎可以忽略,低階模態與高階模態間的相似度也很低。總體來說,方案一所得到的各階模態基本符合模態正交理論。
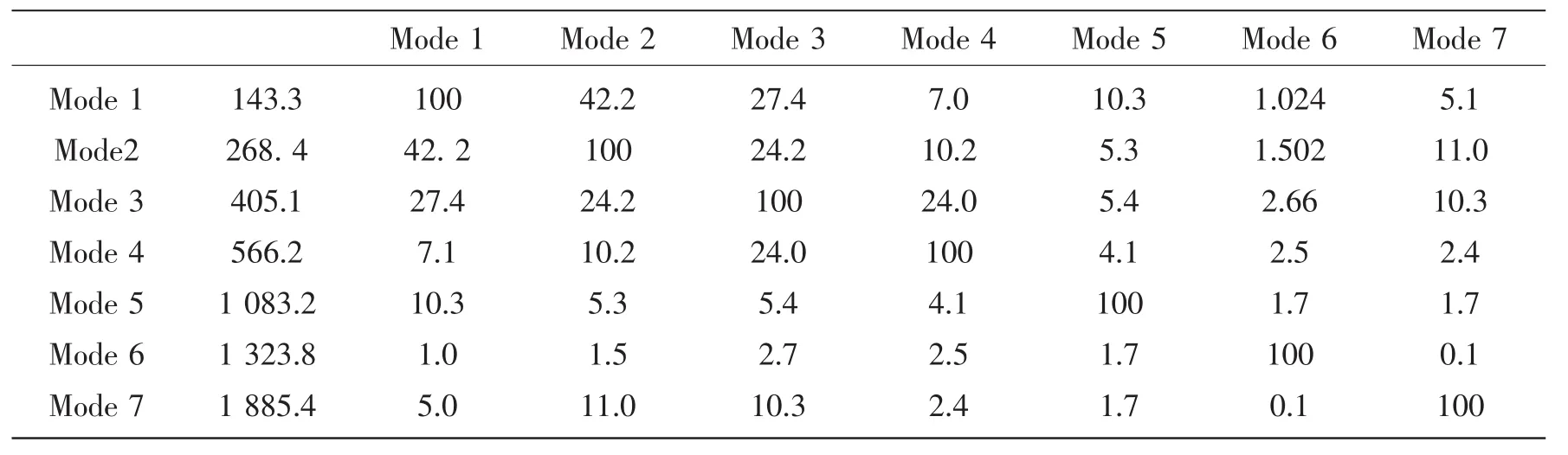
表6 由方案一所得模態自相關函數表Tab.6 Mode autocorrelation function table of scheme 1
3.2 方案一模態有效性分析
在某一測點給結構附加一質量,會降低所有模態的有阻尼固有頻率。這一理論特性構成評價模態振型向量的一個判據。對于每一測點而言,各固有頻率對該測點質量增加的靈敏度是可以求出的,且應該是負值。對應某一階模態(k)的“模態超復性”MOV定義為在該測點附加質量后,固有頻率確實降低的這種測點所占的加權百分比,即:
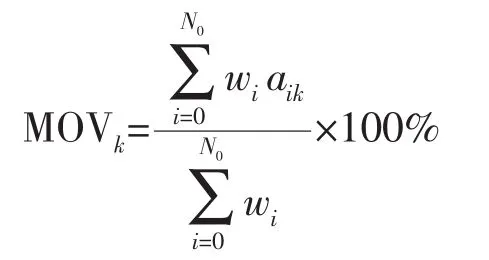
其中:wi為加權因子,取wi=1(不加權)或,若是對于第k階模態而言,在測點i附近附加質量后的固有頻率靈敏度為負值;aik=0其他情況[7]。
經過對方案一中一組低頻信號和三組高頻信號進行分析,并對比各組數據后對模態參數進行了修正,最終得到如表7所示的函數值。
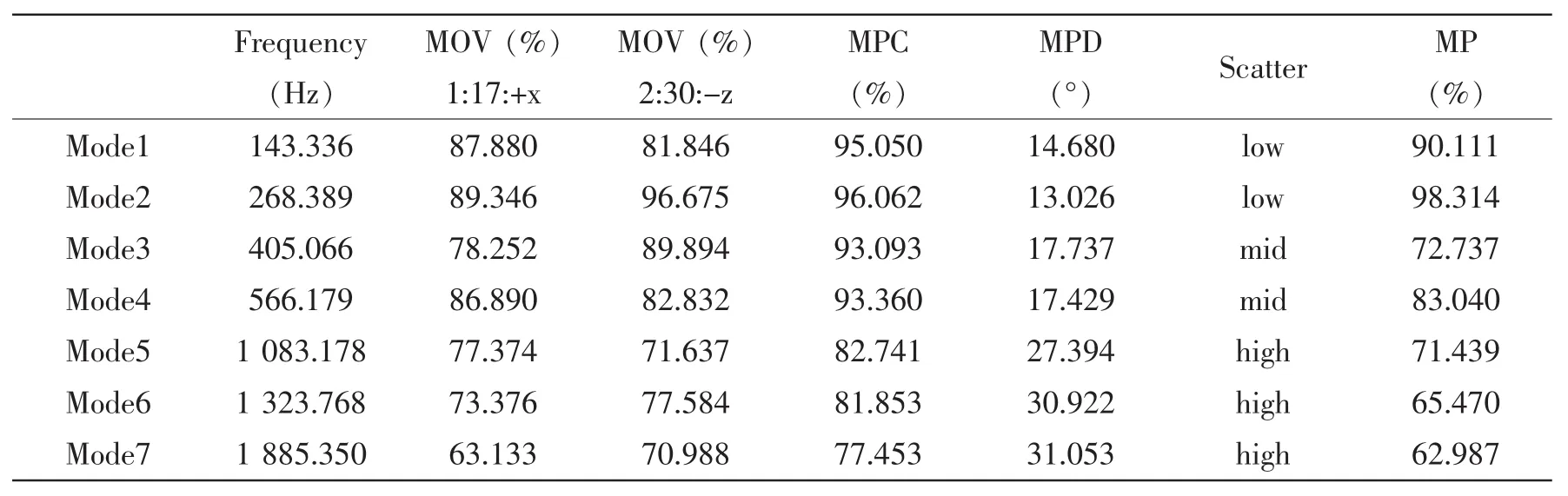
表7 由方案一所得相關函數值Tab.7 Correlation function value of scheme 1
表7中,MOV代表模態超復性,MPC代表模態相位共線性,MPD代表平均相位偏移,MP代表模態參預。
由前述MPC和MPD函數意義可知,方案一所得模態低階部分MPC都具有較高值,前兩階模態MPC值甚至接近100%;同時MPD值也較低,即同一模態各個復數的模態振型系數之間共線性較好,近似同相。這表明低階部分模態清晰,模態置信度很高,且都為實正則模態。而高階部分MPC值明顯較低階部分小,均在80%左右,且MPD值表明各模態振型間共線性相對較差。這主要是因為試驗環境相對較差,高階信號干擾較多,同時高階部分局部模態較為密集,不利于對整體模態進行篩選。
總體講,方案一所得數據在低頻段具有較好的可信度,同時對多組數據分析發現方案一所得模態參數在低頻段具有很高的可重復性。而對于高階頻段部分,由于試驗中不可避免存在各種干擾和誤差,導致方案一高頻段模態數據可信度較低頻段差,不適用于系統的整體模態分析,此處列出主要用于和方案二作對比分析用。
方案二模態自相關函數數據列表如表8所示。

表8 由方案二所得模態自相關函數表Tab.8 Mode autocorrelation function table of scheme 2
3.3 方案二模態可信度分析
由MAC函數可以看出,由方案二所得的自相關函數值低頻部分相對較高,其中所得的第二階模態和第三階模態相似度最高,高達76%。可知第二組試驗進行過程中受到了較強的低頻信號干擾,同時也可能是由于支承方式的改變引起了模態參數的變化和信號的失真。除此之外,其他模態間相似度較低,高階模態之間相似度均在5%之內,說明此時高頻段內受到的干擾信號較小,模態選取時參數設置得當。另外高階模態與低階模態間相似度都在10%以內,即本方案整體講能很好地排除高頻段信號干擾,但由于支承方式的改變同時放大了低頻段的干擾信號。
3.4 方案二模態有效性分析
經過對方案二中一組低頻信號和一組高頻信號進行分析,對比兩組數據后所得到的相關數據對模態參數進行了修正,最終得到如表9所示的MOV值。

表9 由方案二所得相關函數值Tab.9 Correlation function value of scheme 2
由表9可以看出,方案二所得到的模態相位共線性MPC和平均相位偏離MPD平均值相對穩定。低頻部分四階模態MPC值均在90%左右,且平均相位差較小,即低頻部分模態共線性較好。相對低頻部分,高頻段所提取的三階模態整體效果略差,模態相位共線性MPC值均在80%附近,且平均相位偏離較大,表明模態共線性相對較差。表明方案二雖然在處理噪聲干擾方面有較大優勢,但由于近似處于完全自由狀態,在減小高頻段信號干擾的同時低頻段信號的干擾得到了放大。
整體上看,兩種方案在模態參數估計上都能取得相對合理的結果,但方案一整體效果比方案二好。兩種方案在提取系統模態頻率和振型方面差別不大,但在阻尼的方面方案二比方案一所得數據更接近真實值。在模態剛度,模態質量和模態阻尼方面,兩種方案所得結果在數量級上差別不大,都能滿足要求。方案二在獲取低頻模態信息方面效果較好,而方案一在獲取高頻模態信息方面效果較好。具體應用時應根據所關心的頻段和模態參數選取不同方案的數據進行參考。
4 結論
本次行星減速器模態試驗采用MIMO方法,在兩種支承形式下共采集到了六組試驗數據,運用LMS模態分析軟件對所得數據進行分析,共得到七階模態參數。經分析,所得各階模態數據均具有較高的置信度,可為行星減速器的應用提供指導。
[1]Yao C C,Chang K C,Lee C C.Damage diagnosis of steel frames using vibrational signature analysis[J].Engineering Mechanics(ASCF),1992,118(9):1949-1960.
[2]張新玉,張文平,李全,王芝秋.圓柱形薄殼結構的試驗模態分析方法研究[J].哈爾濱工程大學學報,2006,27(1): 20-25. ZhangXinyu,ZhangWenping,Li Quan,Wang Zhiqiu.Experimental modal analysis method of cylindrical thin shell structures[J].Journal of Harbin Engineering University,2006,27(1):20-25.
[3]陳朝陽,石琴,錢鋒,溫千虹,張翔.驅動橋殼多輸入/多輸出時域模態分析[J].合肥工業大學學報,2000,23(4): 468-472. Chen Chaoyang,Shi Qin,Qian Feng,Wen Qianhong,Zhang Xiang.MINO experimental modal analysis in time domain for drive axle housing[J].Journal of Hefei University of Technology,2000,23(4):468-472.
[4]范秀杰,趙宇.某發動機低壓渦輪軸模態試驗研究[J].科技創新導報,2014,32:36. Fan Xiujie,Zhao Yu.Experimental modal analysis for low pressure turbine shaft of engine[J].Science and Innovation Herald,2014,32:36.
[5]焦安超,馮咬齊.‘天宮一號’目標飛行器結構模態試驗方法[J].航天器環境工程,2011,28(6):593-596. Jiao Anchao,Feng Yaoqi.Method of structural modal test for Tiangong-1 target spacecraft[J].Spacecraft Environment Engineering,2011,28(6):593-596.
[6]張華鑫,童敏勇.某轎車白車身模態試驗分析研究[J].機械研究與應用,2014,27(3):107-109. Zhang Hanxin,Tong Minyong,Modal test analysis and research for body-in-white[J].Mechanical Research and Application,2014,27(3):107-109.
[7]傅志方,華宏星.模態分析理論與應用[M].上海:上海交通大學出版社,2000. Fu Zhifang,Hua Hongxing.Modal analysis theory and application[M].Shanghai:Press of Shanghai Jiaotong University, 2000.
Modal test of planetary gear reducer based on MIMO method
ZHANG Kun1,YU Yang2,YU Xiao-hui1
(1.The 703 Research Institute of CSIC,Harbin 150078,China;2.Military Delegate Office in Harbin 703 Research Institute,Harbin 150078,China)
Multiple Input Multiple Output(MIMO)method was applied to experimental modal analysis methods on planetary gear reducer for modal test and analysis.Six groups test data under high frequency signal and low frequency signal in scheme 1(suspension of elastic rope)and scheme 2(mixed supports of inflation tire)two support forms were processed by using LMS test.Lab 10a test software.System seven-order mode frequency and shapes,mode mass,mode stiffness,mode damp,and so on were obtained.Finally, mode reliability and validity were analyzed between scheme 1 and scheme 2.Analysis results show that both scheme 1 and scheme 2 have relatively logical results,scheme 2 has better effect in obtaining low frequency mode information and scheme 1 has better effect in obtaining high frequency mode information.Frequency range and mode parameter should be taken over when applying.
planetary gear reducer;modal test;LMS;the Least Square Complex Exponent method
TH132.4
A
10.3969/j.issn.1007-7294.2015.11.011
1007-7294(2015)11-1377-08
2015-09-24
張坤(1985-),女,工程師,E-mail:zhangkun19851027@163.com;
于洋(1982-),男,工程師。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
山東工業技術(2016年15期)2016-12-01 05:31:22
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
