運載火箭姿態(tài)的自抗擾控制器設計*
2015-04-17 02:15:31程昊宇
彈箭與制導學報 2015年4期
王 曄,程昊宇
(1 湖北工業(yè)大學電氣與電子工程學院,武漢 430068;2 北京宇航系統(tǒng)工程研究所,北京 100076;3 北京航空航天大學航空科學與工程學院,北京 100191)
運載火箭姿態(tài)的自抗擾控制器設計*
王 曄1,2,程昊宇3
(1 湖北工業(yè)大學電氣與電子工程學院,武漢 430068;2 北京宇航系統(tǒng)工程研究所,北京 100076;3 北京航空航天大學航空科學與工程學院,北京 100191)
為了抑制運載火箭自身結構參數(shù)變化和內外擾動對姿態(tài)控制精度和姿態(tài)穩(wěn)定性的影響,設計了自抗擾控制器。通過跟蹤微分器為期望姿態(tài)安排過渡過程,并提取其微分信號,然后利用擴張狀態(tài)觀測器,采用復合量測信息對系統(tǒng)的不確定項進行估計;設計姿態(tài)反饋控制器,利用擴張狀態(tài)觀測器估計的信號對不確定項進行實時補償,實現(xiàn)對運載火箭的姿態(tài)控制。最后通過仿真說明了自抗擾控制器可以獲得良好的動態(tài)性能、抗擾性和較強的魯棒性。
運載火箭;姿態(tài)控制;自抗擾控制器;擴張狀態(tài)觀測器;魯棒性
0 引言
隨著航天技術的發(fā)展,運載火箭的構造越來越復雜,性能要求也越來越高,而姿態(tài)控制技術是確保運載火箭飛行成功的關鍵技術,傳統(tǒng)的運載火箭姿態(tài)控制技術是采用比例微分+校正網(wǎng)絡的控制方式[1],通過改變動靜態(tài)增益和校正網(wǎng)絡對火箭進行控制,但是火箭的模型一般是不能確切獲知的,具有參數(shù)不確定性,而且火箭在飛行過程中普遍存在的內部結構干擾、風干擾等內外擾動會影響姿態(tài)控制系統(tǒng)的控制精度和性能,采用PD控制不易滿足系統(tǒng)高性能的要求,因此,設計滿足運載火箭的性能要求,能夠解決非線性、強耦合特性問題,且對系統(tǒng)存在的內外不確定性具有魯棒性的姿態(tài)控制器,成為運載火箭姿態(tài)控制研究的重要內容。
近年來,許多學者對火箭的姿態(tài)控制進行了研究[2-4],文獻[3]采用自適應方法研究了火箭的姿態(tài)控制問題;文獻[4]采用二階滑模實現(xiàn)了運載火箭的姿態(tài)控制,在保證系統(tǒng)魯棒性的前提下,有效的削弱了抖振現(xiàn)象,但是以上方法都依賴于火箭的精確模型,由于火箭模型復雜,在實際工程中很難獲得精確的數(shù)學模型。
自抗擾控制器包括跟蹤微分器(tracking differentiator, TD)、擴張狀態(tài)觀測器(extended state observer, ESO)、非線性反饋(nonlinear feedback, NF)等技術,具有不依賴于被控對象的精確模型、魯棒性強、精度高、抗干擾能力強和算法簡單等優(yōu)點[6],在航空航天領域獲得了廣泛的應用[7-11]。文獻[8]研究了航天器的高度控制問題,將滑模控制與自抗擾控制結合起來設計控制器,并與自適應滑模控制算法進行比較,仿真表明,自抗擾滑模算法具有較高的控制精度和較強的魯棒性;文獻[9]針對無人直升機航向通道擾動大的問題,設計了自抗擾算法來實現(xiàn)其高性能控制,并與常見的串級控制方法進行了對比分析。
由于運載火箭模型復雜,在飛行過程中會受到各種內外不確定性的影響,文中針對運載火箭姿態(tài)設計問題,設計了自抗擾控制器。首先以縱向通道為例建立了運載火箭小偏差姿態(tài)動力學模型,通過跟蹤微分器安排過渡過程,柔化程序角信號并提供其微分信號,然后通過擴張狀態(tài)觀測器[11-13]對內外干擾進行估計,采用非線性姿態(tài)反饋控制器對干擾進行實時補償,從而實現(xiàn)對火箭姿態(tài)的控制,最后通過仿真將文中設計的控制器與傳統(tǒng)的PD控制進行對比,說明了自抗擾控制具有較強的魯棒性和較高的控制精度。
1 模型描述
火箭動力學模型是在將火箭視為一維梁模型的基礎上推導而來的。推導火箭動力學方程的文獻較多,從建模原理和方法上看主要有兩類,一類是牛頓-歐拉矢量力學方法,另一類是以拉格朗日方程為代表的分析力學方法。火箭姿態(tài)控制系統(tǒng)主要考慮的是姿態(tài)角偏差的消除,并使箭體按照選定的軌道和給定的程序角飛行,可以近似認為箭體姿態(tài)角偏差暫態(tài)過程中方程系數(shù)是固定不變的,可以采用“固化系數(shù)法”對火箭進行建模和分析。文中以某型火箭為例,給出俯仰通道剛體與彈性運動方程,其中,剛體運動方程為:
(1)
(2)
Δφ=Δα+Δθ
(3)
彈性振動方程為:
(4)
慣組和速率陀螺測量方程為:
(5)
(6)
其中:b3為控制力矩系數(shù);b″3為擺動發(fā)動機慣性力矩系數(shù);i=1,2,…,n為彈性振動階次,D3i為廣義控制力系數(shù),D″3i為擺動發(fā)動機廣義慣性力系數(shù);δφ為俯仰通道綜合控制擺角,其余參數(shù)和定義可參考文獻[14]。
注:偏航通道控制器設計和滾動通道控制器設計與俯仰通道控制器設計類似,這里不再贅述。
2 自抗擾控制器設計
文中提出的自抗擾控制器由跟蹤微分器、擴張狀態(tài)觀測器和非線性反饋控制器三部分組成。自抗擾控制對模型依賴程度較低,并且對于系統(tǒng)中的內外干擾具有較好的抑制作用,非常適合運載火箭這類動態(tài)特性復雜,且存在各種不確定性的非線性系統(tǒng),因此,文中以俯仰通道為例,設計自抗擾控制器,需要指出的是,火箭3個通道之間雖然存在耦合,但是自抗擾控制器可以完全解決耦合的問題,將耦合項當作系統(tǒng)的內部擾動,同環(huán)境干擾力矩一起,均作為對整個系統(tǒng)的擾動,利用ESO進行實時估計并補償。整個系統(tǒng)的結構圖如圖1所示。
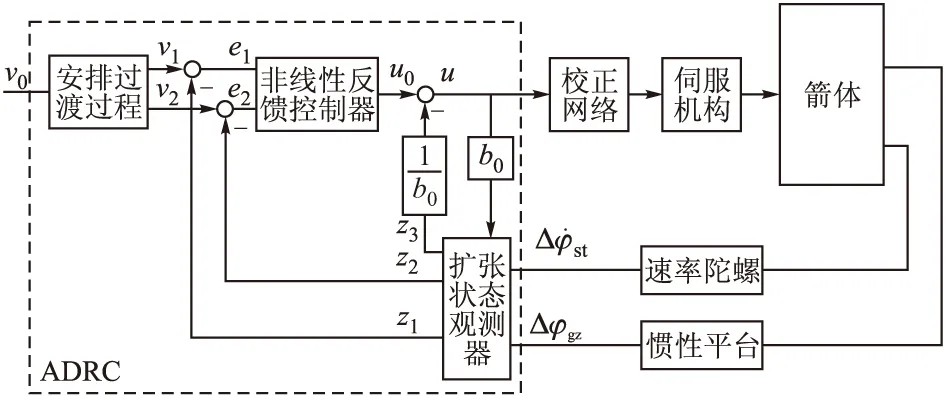
圖1 火箭自抗擾控制系統(tǒng)結構
2.1 安排過渡過程
事先安排過渡過程是解決超調與快速性矛盾的一種很有效的辦法,還可以使給定的反饋增益所能適應的對象參數(shù)范圍擴大,文中采用如下所示跟蹤微分器[15]實現(xiàn)安排過渡過程,柔化程序角信號,減小其突變量:
(7)
式中:非線性函數(shù)fhan(·)為最速控制綜合函數(shù),其算法公式如下所示:
(8)
其中:v0為控制輸入,v1為控制輸入v0的跟蹤信號,v2為v1的微分信號,可近似當做v0;fhan(·)函數(shù)的主要作用是在給定加速度上限的條件下,讓v1最快且無抖振的跟蹤程序角信號v0,包含r和h兩個參數(shù),其中,h為系統(tǒng)的采樣周期,r為可調參數(shù),若r越大,則v1跟蹤v0越快,因此把r稱為“快速因子”,可以根據(jù)過渡過程的快慢以及系統(tǒng)的承受能力來決定。
通過式(7)所示的跟蹤微分器來安排過渡過程,可以用較為光滑的信號v1代替突變的程序角信號v0,并且得到其微分值,然后與反饋信號作差,進而得到較為柔和的誤差及其微分信號。
2.2 擴張狀態(tài)觀測器設計
由于系統(tǒng)的模型不可避免的存在偏差,而且火箭在飛行過程中由于飛行高度、飛行速度、大氣環(huán)境的變化以及火箭內部結構干擾的影響,導致箭體姿態(tài)動力學模型參數(shù)存在很大程度的不確定性,而且柔性火箭的姿態(tài)控制系統(tǒng)設計需要考慮箭體彈性振動的影響,而彈性振動頻率也具有不確定性。文中綜合利用慣組和速率陀螺的測量信息,采用復合誤差對狀態(tài)和干擾進行估計和補償,簡化了設計。定義復合觀測誤差為:
(9)
設計擴張狀態(tài)觀測器如下:
(10)
其中:z1、z2分別為俯仰角和俯仰角速率的估計;z3為內外不確定項的估計;κ、λ為適當選取的大于零的常數(shù);βi(i=1,2,3)為ESO的參數(shù),可以根據(jù)觀測效果進行調整;b0是決定補償強弱的“補償因子”,作為可調參數(shù)來使用;fal(·)為非線性函數(shù),δ1為設定值,μ1、μ2為其參數(shù),可以根據(jù)誤差大小來調整控制增益,其表達式為:
(11)
利用擴張狀態(tài)觀測器可以對系統(tǒng)中的擾動進行很好的估計,然后反饋至控制器進行補償。
2.3 姿態(tài)反饋控制器設計
將跟蹤微分器輸出的程序角及其微分信號與擴張狀態(tài)觀測器輸出的俯仰角和俯仰角速率的估計信號作差,并對擴張狀態(tài)觀測器估計的不確定項進行實時補償,實現(xiàn)自抗擾的功能,因此設計如下形式的誤差反饋律:
其中:誤差信號e1=v1-z1;誤差微分信號e2=v2-z2;kp、kd分別為控制律的比例增益和微分增益,為可調參數(shù);fal(·)函數(shù)如前所述,當0<μ3<1,u0中的比例環(huán)節(jié)fal(e1,μ3,δ2)是控制工程界的一個經(jīng)驗知識:“大誤差,小增益;小誤差,大增益”的數(shù)學擬合,采用一個簡單的非線性結構fal(·)描述了這一經(jīng)驗知識,對于微分環(huán)節(jié)fal(e2,μ4,δ2)則要求微分誤差小時微分增益也小,微分誤差大時微分增益也大,因此取μ4>1,這樣使得接近穩(wěn)態(tài)時微分作用變小。
3 仿真結果與分析
文中以某型號火箭發(fā)射過程中相關秒點的系統(tǒng)參數(shù)為例,考慮一階彈性振動,即i=1,對系統(tǒng)進行仿真,標稱模型的參數(shù)取值如下所示:
c1=0.163;c1p=0.001 3;c2=0.093;c3=0.04;c″3=4.937×10-5;c4=-5×10-4;b1=0.046 5;b2=-0.042 1;b3=0.567 4;b″3=0.567 6;b11=6.812×10-4;ζ1=0.005;ω1=8.5;D11=-1.912 1;D21=7.235 7;D31=16.428 6;D″31=0.021 7。
自抗擾控制器參數(shù)為:β1=5.2,β2=40,β3=1.9,kp=0.7,kd=1.8,μ1=0.25,μ2=0.25,μ3=0.35,μ4=1.1,δ1=0.06,δ2=0.05,b0=0.8。
分別在以下兩種情況下對系統(tǒng)進行仿真,并將傳統(tǒng)的PD控制與自抗擾控制進行對比:
情況1:標稱情況下,俯仰角存在5°度的初始偏差;
通過圖2~圖5所示的仿真可以看出,在存在內外干擾的情況下,采用自抗擾控制器,比傳統(tǒng)動態(tài)增益+靜態(tài)增益的控制方法具有更強的抗擾性,說明了自抗擾控制器有效地對干擾進行了實時補償,滿足了系統(tǒng)性能的要求。
情況1的仿真結果如圖2~圖3所示。
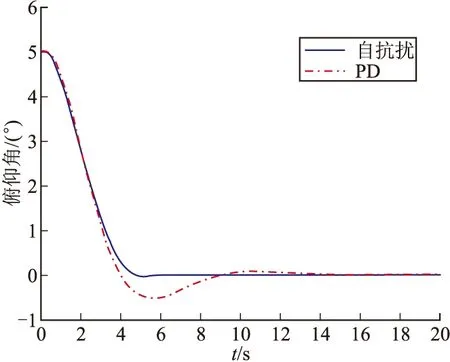
圖2 情況1俯仰角響應曲線

圖3 情況1俯仰角速率響應曲線
存在不確定情況下的仿真曲線如圖4~圖5所示。
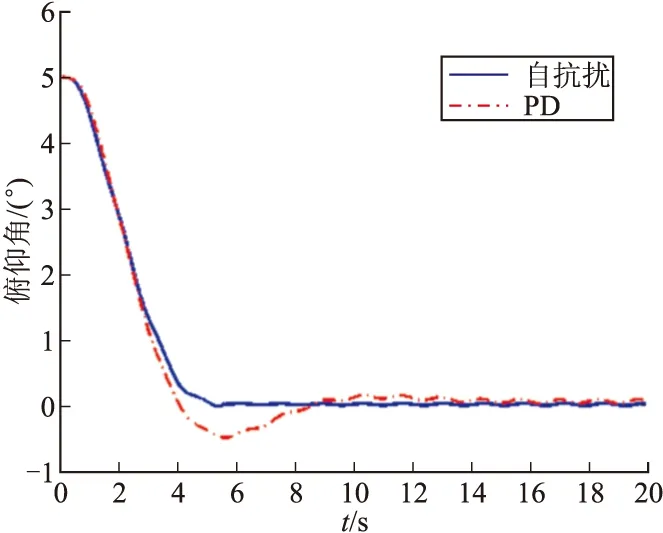
圖4 情況2俯仰角響應曲線
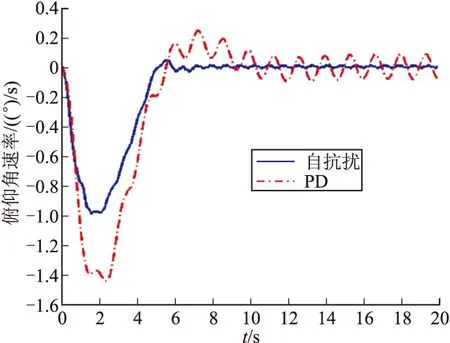
圖5 情況2俯仰角速率響應曲線
4 結論
1)采用擴張狀態(tài)觀測器有效估計了系統(tǒng)受到的內外擾動,且不依賴于精確的運載火箭模型。
2)利用非線性反饋技術對擴張狀態(tài)觀測器估計的擾動信息進行實時補償,并采用跟蹤微分器柔化了程序角信號。
3)充分利用了慣組和速率陀螺的信息,通過復合量測信息,設計了單回路姿態(tài)控制系統(tǒng),簡化了系統(tǒng)的結構。
4)通過仿真與傳統(tǒng)PD控制進行對比,說明了自抗擾控制器具有魯棒性好,控制精度高的優(yōu)點。
[1] 徐延萬. 液體導彈與運載火箭系列: 控制系統(tǒng)(上冊) [M]. 北京: 宇航出版社, 2005.
[2] Roshannian J, Saleh A R, Jahed-Motlagh M R. On the design of adaptive autopilots for a launch vehicle [J]. ImechE Part I: J System and Control Engineering, 2007, 221: 27-38.
[3] Choong-Seok Oh, Hyochoong Bang, Chang-Su Park. Attitude control of a flexible launch vehicle using an adaptive notch filter: ground experiment [J]. Control Engineering Practice, 2008, 16: 30-42.
[4] 王青, 王昭, 董朝陽. 一種基于二階滑模的柔性運載火箭姿態(tài)控制 [J]. 系統(tǒng)仿真學報, 2009, 21(7): 2006-2009.
[5] Han Jingqing. From PID to active disturbance rejection control [J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[6] Li Shunli, Yang Xu, Yang Di. Active disturbance rejection control for high pointing accuracy and rotation speed [J]. Automatica, 2009, 45(8): 1854-1860.
[7] Wang Chunming, Xia Yuanqing, Fu Mengyin, et al. Application of active disturbance rejection control in tank gun control system [J]. Journal of The Franklin Institute, 2014, 351(4): 2299-2314.
[8] Xia Yuanqing, Zhu Zheng, Fu Mengyin, et al. Attitude tracking of rigid spacecraft with bounded disturbances [J]. IEEE Transactions on Industrial Electronics, 2011, 58(2): 647-659.
[9] 方勇純, 申輝, 孫秀云, 等. 無人直升機航向自抗擾控制 [J]. 控制理論與應用, 2013, 31(2): 238-243.
[10] 康瑩, 李東海, 老大中. 航天器姿態(tài)的自抗擾控制與滑模控制的性能比較 [J]. 控制理論與應用, 2013, 30(12): 1623-1629.
[11] Zheng Zhu, Dong Xu, Liu Jingmeng, et al. Missile guidance law based on extended state observer [J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5882-5891.
[12] Guo Baozhu, Zhao Zhiliang. On the convergence of an extended state observer for nonlinear system with uncertainty [J]. Systems & Control Letters, 2011, 60(6): 420-430.
[13] Guo Baozhu, Zhao Zhiliang. On convergence of non-linear extended state observer for multi-input multi-output system with uncertainty [J]. IET Control Theory and Applications, 2012, 6(15): 2375-2386.
[14] 徐延萬. 彈道導彈、運載火箭控制系統(tǒng)設計與分析 [M]. 北京: 宇航出版社, 1999: 63-65.
[15] Guo Baozhu, Zhao Zhiliang. On convergence of tracking differentiator [J]. International Journal of Control, 2011, 84(4): 693-701.
Active Disturbance Rejection Control of Attitude for Launch Vehicle
WANG Ye1,2,CHENG Haoyu3
(1 School of Electrical and Electronic Engineering, Hubei University of Technology, Wuhan 430068, China;2 Beijing Institute of Astronautical Systems Engineering, Beijing 100076, China;3 School of Aeronautic Science and Technology, BUAA, Beijing 100191, China)
A novel active disturbance rejection controller(ADRC) of attitude was designed to attenuate effect of parameter variation and disturbances of launch vehicle on attitude control accuracy and stability. A tracking differentiator was proposed to arrange transient dynamics of desired attitude and provide differential signal of the attitude, then an extended state observer was designed to estimate and compensate impact of parametric uncertainties and disturbances by taking full advantage of information of gyros and attitude sensors. An attitude feedback controller was designed to realize attitude control by compensating the disturbances from the extended state observer. Simulation results show that ADRC exhibits better dynamic performance, higher ability and stronger robustness against external disturbance and parameter uncertainty.
launch vehicle; attitude control; active disturbance rejection control; extended state observer; robustness
2014-07-07
國家自然科學基金(61273083)資助
王曄(1970-),男,北京人,碩士研究生,研究方向:魯棒控制,自抗擾控制。
O232;V448
A
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
