三維空管自動(dòng)化系統(tǒng)投影技術(shù)研究
2015-04-16 08:52:52蘇志剛吳仁彪
計(jì)算機(jī)工程與應(yīng)用 2015年19期
關(guān)鍵詞:系統(tǒng)
蘇志剛,聶 瑩,吳仁彪
SU Zhigang1,2,NIE Ying2,WU Renbiao2
1.中國民航大學(xué) 中歐航空工程師學(xué)院,天津300300
2.中國民航大學(xué) 智能信號(hào)與圖像處理天津市重點(diǎn)實(shí)驗(yàn)室,天津300300
1.Sino-European Institute of Aviation Engineering,Civil Aviation University of China,Tianjin 300300,China
2.Tianjin Key Laboratory for Advanced Signal Processing,Civil Aviation University of China,Tianjin 300300,China
1 引言
民用航空運(yùn)輸作為一種快捷安全的交通方式,得到世界各國的高度關(guān)注,世界各主要經(jīng)濟(jì)體的民用航空發(fā)展速度均高于其經(jīng)濟(jì)發(fā)展速度。為確保民航航空的安全性,地面管制人員需要全面掌握所關(guān)注空域內(nèi)全部航班的動(dòng)態(tài)信息及相應(yīng)的管制信息,特別是在航班密集空域。為精細(xì)準(zhǔn)確地確定飛行器在空間的位置,飛行器四維航跡(即用加入時(shí)間約束的三維空間坐標(biāo)表示的飛行器航跡)的研究成為當(dāng)前空中交通管理領(lǐng)域研究的熱點(diǎn)問題,這也是實(shí)現(xiàn)新一代空中交通管理系統(tǒng)(NextGen,SESAR)的關(guān)鍵技術(shù)[1]。國內(nèi)外圍繞四維航跡的預(yù)測(cè)、規(guī)劃、顯示等技術(shù)展開了深入的研究[2-4]。2012 年2 月AirBus 公司完成從圖盧茲到哥本哈根的全球首次基于四維航跡技術(shù)的試驗(yàn)飛行任務(wù)。
傳統(tǒng)空管自動(dòng)化系統(tǒng)采用二維平面綜合顯示地圖輔助管制員了解空域內(nèi)飛行器的動(dòng)態(tài)信息,飛行器的高度信息由相應(yīng)的標(biāo)牌指示。然而,新一代空中交通管理系統(tǒng)中,為提高機(jī)場(chǎng)容量,采用持續(xù)下降進(jìn)近或持續(xù)上升離場(chǎng),傳統(tǒng)的二維平面綜合顯示地圖已經(jīng)無法滿足管理員對(duì)空域中飛行器高度變化的掌控[5]。基于三維地理信息的二維投影技術(shù)成為四維航跡的推薦顯示方式。飛行器四維航跡的動(dòng)態(tài)顯示需利用三維地理信息搭建可投影到二維顯示屏上的三維場(chǎng)景,其支撐技術(shù)為透視投影。20世紀(jì)初,透視基礎(chǔ)理論的兩個(gè)重大成果,Kruppa定理和Beskin 定理,揭示了透視投影問題的基本規(guī)律[6]。文獻(xiàn)[7]給出Kruppa 定理的解析形式,隨后,在此基礎(chǔ)上從[7]射影幾何角度完善了透視投影理論[8-10]。隨著計(jì)算機(jī)圖形學(xué)的發(fā)展,透視投影衍衍生出以物體坐標(biāo)系、視點(diǎn)坐標(biāo)系以及畫面坐標(biāo)系為基礎(chǔ)的透視投影技術(shù)[11-13]。
以物體坐標(biāo)系、視點(diǎn)坐標(biāo)系以及畫面坐標(biāo)系為基礎(chǔ)的透視投影技術(shù),需要建立三個(gè)坐標(biāo)系并且實(shí)現(xiàn)相互之間的轉(zhuǎn)換,難以適用于空管自動(dòng)化系統(tǒng)的顯示要求。因此本文在透視投影的規(guī)律下,利用計(jì)算機(jī)圖形基礎(chǔ)建立三維地理坐標(biāo)系與投影坐標(biāo)系,利用坐標(biāo)的旋轉(zhuǎn)與幾何關(guān)系,分別得到方位角、傾角以及視點(diǎn)、投影平面與地圖基準(zhǔn)面的相對(duì)位置對(duì)投影的影響因子,從而得到透視投影算法。并將所提出的透視投影算法應(yīng)用于三維地圖軟件搭建的三維背景中,實(shí)現(xiàn)三維空間中飛行器標(biāo)牌定位。
2 問題描述
空管自動(dòng)化系統(tǒng)中飛行器的四維航跡顯示平臺(tái)利用三維地理信息數(shù)據(jù),通過對(duì)三維空間的抽象描述,使系統(tǒng)平面位置綜合顯示器上的二維圖像呈現(xiàn)出景深、透視度等三維顯示特征[14-15]。通過三維空間觀測(cè)方位、傾角的變化形成對(duì)關(guān)注空域不同方位、不同傾角的二維多視角顯示[16]。空管自動(dòng)化系統(tǒng)所采用的三維空間顯示通常是基于兩點(diǎn)透視投影形成的,即假設(shè)三維空間為一個(gè)長方體,投影平面與長方體的所有面相交,且至少與長方體的某一條邊平行[17]。
以空管自動(dòng)化系統(tǒng)中心O點(diǎn)的水平面ABCD作為地圖基準(zhǔn)面,并以此點(diǎn)為原點(diǎn)構(gòu)建三維坐標(biāo)系OXYZ,其中平面XOY與水平面ABCD重合。將基準(zhǔn)面ABCD分別沿Z軸和X軸旋轉(zhuǎn)角度α和φ,形成如圖1 所示的三維投影結(jié)構(gòu)。在圖1 中平面X′O′Y′為投影平面,其與平面XOY平行,點(diǎn)P(0,0,zp) 為視點(diǎn),三維空間中點(diǎn)V(xV,yV,zV)是點(diǎn)隨基準(zhǔn)面ABCD旋轉(zhuǎn)后的 位 置。點(diǎn)Vp(x′V,y′V) 是 點(diǎn)V(xV,yV,zV) 在 投 影 平 面X′O′Y′ 上的投影點(diǎn),且(x′V,y′V) 是該點(diǎn)在投影平面的坐標(biāo)。
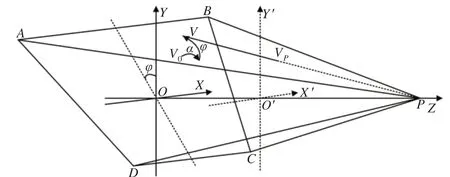
圖1 三維地圖投影示意圖
基于上述假設(shè),空管自動(dòng)化系統(tǒng)中兩點(diǎn)透視投影問題可以描述為點(diǎn)經(jīng)過旋轉(zhuǎn)后的點(diǎn)V(xV,yV,zV)在投影平面上的投影點(diǎn)Vp(x′V,y′V)的坐標(biāo)獲取問題。
3 旋轉(zhuǎn)變換
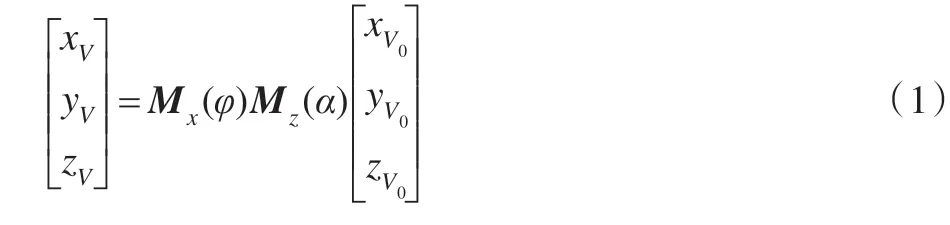
其中,Mz(α)為3×3 的方位旋轉(zhuǎn)矩陣:

用于反映基準(zhǔn)面ABCD繞Z軸旋轉(zhuǎn)角度α的情況,Mx(φ)為3×3 的傾斜旋轉(zhuǎn)矩陣:

用于反映基準(zhǔn)面ABCD繞X軸旋轉(zhuǎn)角度φ的情況。
4 投影變換
投影點(diǎn)Vp(x′V,y′V)與點(diǎn)V(xV,yV,zV)之間的關(guān)系如圖2 所示。
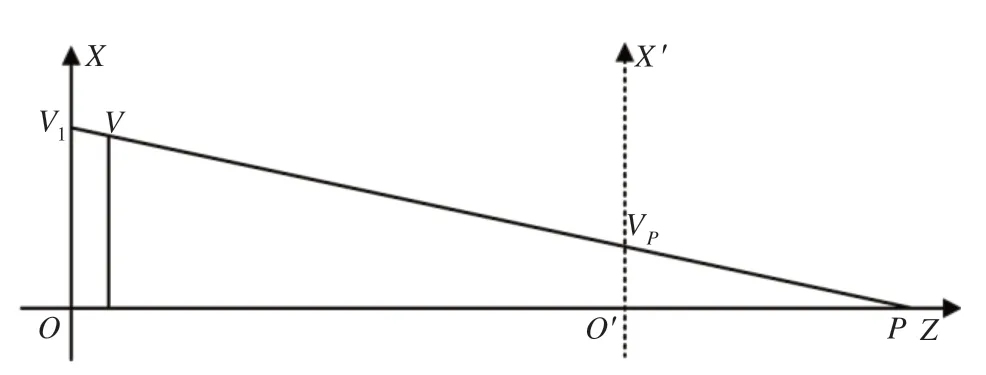
圖2 XOZ 平面投影點(diǎn)與像點(diǎn)位置關(guān)系圖
視點(diǎn)P(0,0,zp)經(jīng)點(diǎn)V(xV,yV,zV)在平面XOY上的投影點(diǎn),根據(jù)幾何關(guān)系可得:
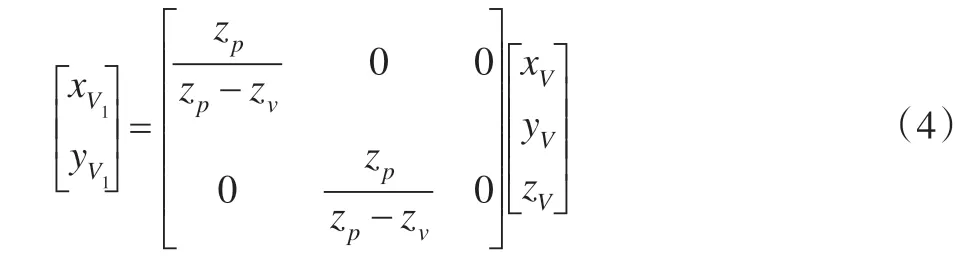
因?yàn)閦p>>zv,式(4)可簡化為:
由于空間信息在平面X′O′Y′上的投影是在平面XOY上投影的等比例縮放,所以假設(shè)縮放因子為k,則
定義

為投影矩陣,其反映了相應(yīng)的三維空間向二維平面的投影關(guān)系。
5 透視投影
如前所述,空管自動(dòng)化系統(tǒng)的三維空間通過旋轉(zhuǎn)變換和投影變換形成二維圖像顯示,所獲得的二維圖像具有景深、透視度等三維特征。因此,當(dāng)對(duì)空間進(jìn)行旋轉(zhuǎn)或縮放操作時(shí),原空間坐標(biāo)變換為投影面上投影點(diǎn)Vp(x′V,y′V)的過程由式(1)與式(6)所確定,即
根據(jù)參數(shù)α、φ及k可以控制三維空間點(diǎn)的投影點(diǎn)位置。
6 實(shí)驗(yàn)結(jié)果
本文利用三維地圖軟件Google Earth 構(gòu)建三維空管自動(dòng)化系統(tǒng)的顯示平臺(tái),以天津空域飛機(jī)的位置信息作為投影映射的實(shí)驗(yàn)數(shù)據(jù),驗(yàn)證本文提出的投影映射方法的有效性。
某一時(shí)刻天津空域內(nèi)飛行器的分布情況如圖3所示,所呈現(xiàn)的是傳統(tǒng)空管自動(dòng)化系統(tǒng)二維顯示模式。飛行器標(biāo)識(shí)旁顯示內(nèi)容為該飛行器對(duì)應(yīng)的標(biāo)牌,飛行器后的曲線為10 s內(nèi)飛行器的歷史位置軌跡。圖中場(chǎng)景信息與飛行器位置信息由Google Earth 形成,而標(biāo)牌位置由外掛系統(tǒng)根據(jù)飛行器三維位置信息變換的投影坐標(biāo)決定。由圖可見,標(biāo)牌與相應(yīng)飛行器的位置對(duì)應(yīng)關(guān)系一致。

圖3 傳統(tǒng)顯示模式下飛行器分布圖
圖4(a)與(b)為同一空域內(nèi),不同方位角及傾角下的飛行器顯示情況。與圖3 相比,圖4(a)與(b)明顯地呈現(xiàn)出透視度和景深等三維顯示特征。由圖4(a)與(b)可見,在非傳統(tǒng)顯示模式下利用本文算法所求得的標(biāo)牌位置仍能與相應(yīng)飛行器位置相匹配,說明本文方法可以有效解決三維場(chǎng)景的透視投影問題。
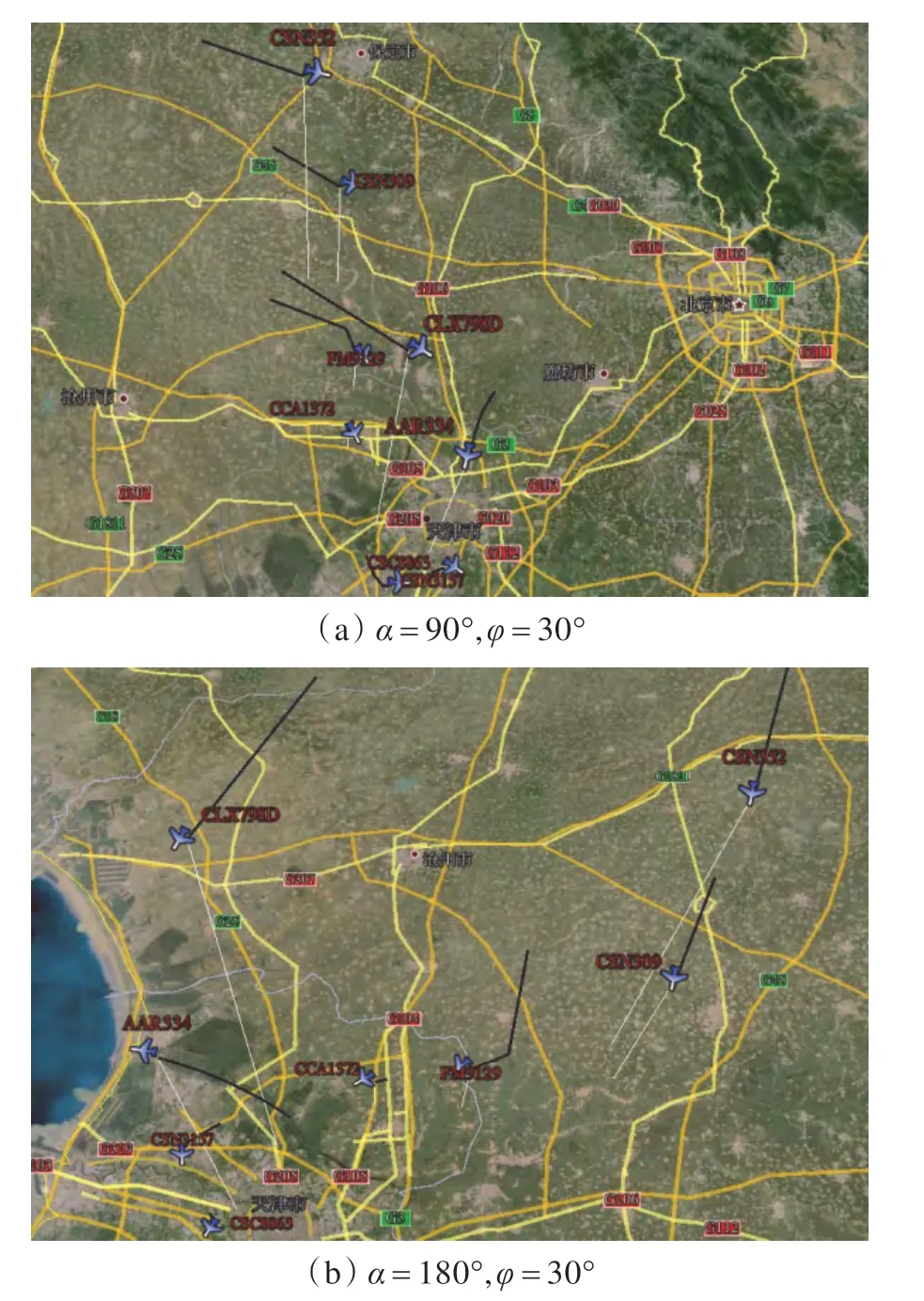
圖4 不同視角下飛行器分布圖
7 結(jié)論
依據(jù)空管自動(dòng)化系統(tǒng)四維航跡有效顯示的需求,針對(duì)三維空間向二維平面透視投影問題,給出適用于空管自動(dòng)化系統(tǒng)三維顯示特點(diǎn)的方位旋轉(zhuǎn)矩陣、傾斜矩陣及投影矩陣。在基于三維地圖軟件Google Earth 構(gòu)建的三維顯示平臺(tái)中,隨著場(chǎng)景旋轉(zhuǎn)與縮放,標(biāo)牌與空域飛行器顯示位置變化一致,表明本文所提出的透視投影算法可以有效地與第三方地圖系統(tǒng)結(jié)合,實(shí)現(xiàn)三維透射投影的操控顯示。
[1] van Marwijk B J A,Borst C,Mulder M,et al.Supporting 4D trajectory revisions on the flight deck:design of a human-machine interface[J].The International Journal of Aviation Psychology,2011,21(1):35-61.
[2] 張險(xiǎn)峰,周其忠,王長青.基于航跡片段樹的快速四維航跡規(guī)劃方法[J].北京航空航天大學(xué)學(xué)報(bào),2013,39(3):310-314.
[3] Porretta M,Dupuy M D,Schuster W,et al.Performance evaluation of a novel 4D trajectory prediction model for civil aircraft[J].The Journal of Navigation,2008,33(3):393-420.
[4] 曲玉玲,韓松臣.四維航跡同一進(jìn)場(chǎng)航線碰撞風(fēng)險(xiǎn)模型[J].南京航空航天大學(xué)學(xué)報(bào),2010,42(5):601-606.
[5] 呂小平.基于GNSS 的終端區(qū)精密進(jìn)近系統(tǒng)應(yīng)用分析[J].中國民用航空,2010,118:70-74.
[6] 陳谷新.論別斯金定理[J].北京農(nóng)業(yè)工程大學(xué)學(xué)報(bào),1990,10(3):89-95.
[7] Odaka S.Fundamental equation of perspective projeetion and its application[C]//Proceedings International Conference on Descriptive Geometry,1978:95-97.
[8] 趙正魁.三維到二維的射影變換與透視投影[J].工程圖學(xué)學(xué)報(bào),1991(2):8-14.
[9] 陳自強(qiáng).透視投影研究[J].華東理工大學(xué)學(xué)報(bào),2000,26(2):201-205.
[10] Guo Yang.A note on the number of solutions of the coplanar P4P problem[C]//Proceedings of the 12th International Conference on Control,Automation,Robotics& Vision,Guangzhou,China,5-7 December,2012.
[11] 吳迪,黃文騫,王瑩.3維地形景觀模擬中的透視投影變換[J].測(cè)繪通報(bào),2003,49(6):27-28.
[12] 王淵,龍華,邵玉斌,等.一種圖形透視投影矩陣的推導(dǎo)及編程實(shí)現(xiàn)[J].甘肅科學(xué)學(xué)報(bào),2011,23(4):127-129.
[13] Hearn D,Baker M P,Carithers W R.Computer graphics with OpenGL[M].4th ed.Beijing:Publishing House of Electronics Industry,2005:303-382.
[14] Singh S P,Jain P K,Mandla Dr V R.Design and calibration of multi camera setup for virtual 3D city modeling[J].International Journal of Engineering Research & Technology,2013,2(5):1373-1376.
[15] Qulasvirta A,Estlander S,Nurminen A.Embodied Interaction with a 3D versus 2D mobile map[J].Personal and Ubiquitous Computing,2009,13(4):303-320.
[16] 任鵬,向南平,胡金星.多視角三維仿真城市地圖的實(shí)現(xiàn)方法[J].地理與地理信息科學(xué),2011,27(3):34-37.
[17] 楊燕燕,茍秉宸,于隋懷,等.基于透視反求的基本體素三維重構(gòu)關(guān)鍵技術(shù)研究[J].計(jì)算機(jī)應(yīng)用研究,2006,12(11):21-24.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
