有色噪聲條件下的子空間辨識改進方法及應用
2015-04-14 12:28:06羅小鎖陳學昌曹保山
計算機工程與應用 2015年1期
羅小鎖 ,陳學昌 ,曹保山
1.重慶電子工程職業學院,重慶 401331
2.重慶大學 自動化學院,重慶 400044
1 引言
傳統的工業控制模型都是采用輸入輸出模型,包括參數模型和非參數模型。但是為了進一步提高控制性能和控制精度,學術界和工業界普遍認為應該采用狀態空間模型,這樣近些年所發展起來的現代濾波理論和控制器設計方法就可以發揮作用[1]。子空間辨識方法是一類狀態空間模型的系統辨識方法,該方法徹底將控制工作者從繁瑣的機理建模中解脫出來,只要具有足夠多的過程輸入輸出數據就可以通過辨識方法得到過程的狀態空間模型[2-3]。子空間辨識方法綜合了系統理論、線性代數和統計學三方面的思想,相比于傳統的辨識方法,諸如預報誤差法和輔助變量法,它有如下優點:(1)不需要參數化;(2)不需要迭代優化;(3)算法實現僅依賴于一些簡單可靠的線性代數工具,如QR分解、SVD分解等;(4)直接估計狀態空間模型,適用于多變量系統辨識[4]。
工業生產過程中普遍存在著噪聲情況,且基本上都是有色噪聲[5]。傳統的子空間辨識方法解決的是白噪聲問題,導致辨識模型誤差較大,控制效果不佳[6]。文獻[7]提出一種利用加權頻域子空間辨識方法來解決噪聲問題,但僅考慮了白噪聲問題。文獻[8]提出一種閉環有色噪聲系統的子空間辨識方法,但有色噪聲僅局限于零均值、穩態、高斯有色噪聲,本文所選有色噪聲更為廣義。文獻[9]提出一種基于輔助變量的子空間辨識方法來處理有色噪聲,將系統分解為確定性部分和隨機性部分,推導過程比較復雜,而且由于眾多參數的影響會導致辨識精度下降。
基于此,本文在文獻[10]基礎上提出一種有色噪聲條件下的子空間辨識改進方法,通過變換系統模型形式將有色噪聲轉變成白噪聲,克服了有色噪聲對系統的影響。將此方法應用于CSTR的過程辨識,獲得了良好的辨識效果。
2 狀態空間模型描述
系統的狀態空間模型方程有多種形式,其中在工業過程中最常用的為隨機性形式:

其中u(k)∈m為系統的輸入測量值,y(k)∈l為系統的輸出測量值,x(k)∈n為系統的過程狀態。w(k)∈n為系統的過程噪聲,v(k)∈l為輸出的測量噪聲,兩者均為零均值白噪聲;(A,B,C,D)為相對應維數的系統矩陣。
3 改進前的子空間辨識方法
假設k為當前時刻,f為未來時刻長度,對(1)通過適當變換可得:

其中棧向量 yf、uf、wf、vf,廣義可觀測矩陣 Γf和Toeplitz矩陣 Hf、Gf為:

同樣定義過去時刻長度p的棧向量狀態空間方程:

其中棧向量 yp、up、wp、vp,廣義可觀測矩陣 Γp和Toeplitz矩陣Hp、Gp定義與前面相似。
將式(2)和(3)寫成Hankel矩陣形式:

為了能夠得到系統矩陣,子空間辨識方法一般由兩步組成:(1)確定廣義可觀測矩陣Γf或者估計出系統的狀態序列;(2)計算系統矩陣。
需要注意的是,從式(2)可知系統模型階次將和f成正比,f選擇過大,會導致高階系統,而高階系統會導致計算的復雜度增加,為此采用奇異值分解法來求解系統的最優模型階次,根據系統奇異值信息的范圍來確定模型階次,具體方法可參考文獻[11-12]。
3.1 確定 Γf或者
考慮矩陣等式(4),采用正交投影方法,利用線性代數工具QR分解、SVD分解等,獲取等式的ΓfXf部分。
將Yf行子空間投影到Uf行子空間的正交補子空間:

根據噪聲與輸入不相關且由投影定理可得到:

在投影左右兩邊分別加入加權矩陣W1和W2并引入中間矩陣οf,通過合適變換可得:

對上式進行SVD分解得:

對于合適的加權矩陣W1,廣義可觀測矩陣滿足:

對于合適的加權矩陣W2,矩陣滿足:

可以作為狀態序列Xf的估計值,而且對于特定的加權矩陣W2,矩陣為 Xf的Kalman估計。
3.2 計算系統矩陣

根據式(1),可得到如下關系式:

其中 ρw和 ρv為殘差矩陣,使用最小二乘法,得到:

其中‖‖·F指矩陣的Frobenius范數。這樣系統的狀態空間矩陣(A,B,C,D)就被估計出來。
4 有色噪聲的處理方法
在實際的工業過程中,噪聲往往是有色噪聲,所謂有色噪聲是指噪聲序列中每一時刻的噪聲和另一時刻的噪聲相關。給定一個高斯白噪聲信號e(k),則有色噪聲ξ(k)可表示為:


給定如下的帶有色噪聲系統狀態空間方程:

其中wns(k)和vns(k)為有色噪聲序列。
將式(15)中狀態空間模型變換得到:

由式(14)可知:

所以可將式(16)寫成:

其中w(k)和v(k)均為零均值白噪聲序列。定義新的狀態空間方程狀態變量xˉ、輸入變量uˉ、輸出變量yˉ:
變換后的系統狀態空間方程為:

這樣就達到了通過變換系統模型形式來處理有色噪聲的目的,主要是讓系統噪聲變為一個零均值白噪聲,雖然不能徹底消除噪聲,卻大大降低了噪聲對系統的影響。然后,在辨識時直接利用變換系統模型后的數據得到系統的狀態空間模型。
5 系統仿真
CSTR即連續攪拌反應釜,是過程控制中經常用到的系統模型,其原理為:兩種不同的化學物質在反應釜中攪拌形成一種濃度為Ca的化合物A,其反應釜溫度為T[13-14]。因為釜內是放熱反應,反應速度會受到影響,因此必須通過引入流量為Qc的冷卻劑,用來冷卻釜內溫度,保證產品的濃度得以控制。CSTR系統如圖1所示。

圖1 CSTR系統圖
CSTR為一個單輸入兩輸出系統,輸入為冷卻劑流量Qc,輸出為產品的濃度Ca和混合溫度T。系統用非線性微分方程組可表示為:
其中q為進料流量,Caf為進料濃度,Tf和Tcf分別為進料溫度和冷卻劑溫度,k0、E R、V、k0、ρ、ρc、Cp、Cpc和hA為化學反應系數,具體參數見表1。

表1 CSTR參數表
為了驗證算法,直接采用CSTR工業對象辨識得到的數據[15],取前1 000個數據用于模型辨識及驗證。其中輸入Qc的數據如圖2所示。
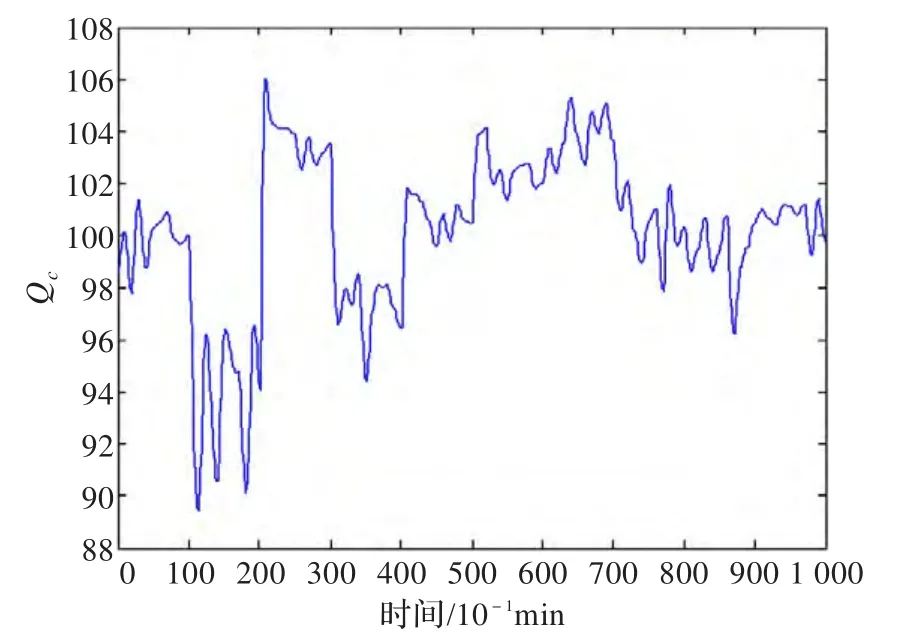
圖2 辨識數據圖
通過子空間辨識獲得系統模型,改進前的系統與模型輸出如圖3所示,其中p和f均為10,采樣時間為10-1min,采樣數N為1 000。從圖2和圖3可以看出,CSTR辨識數據中包含著較強的有色噪聲序列。

圖3 改進前CSTR系統數據(實)和預測輸出(虛)匹配驗證
為了克服有色噪聲數據對系統辨識的影響,引入第4章節中處理有色噪聲的方法,通過變換系統模型形式將有色噪聲轉變為白噪聲,α=0.2,使用 和 的數據進行辨識,改進后的系統與模型輸出如圖4所示。
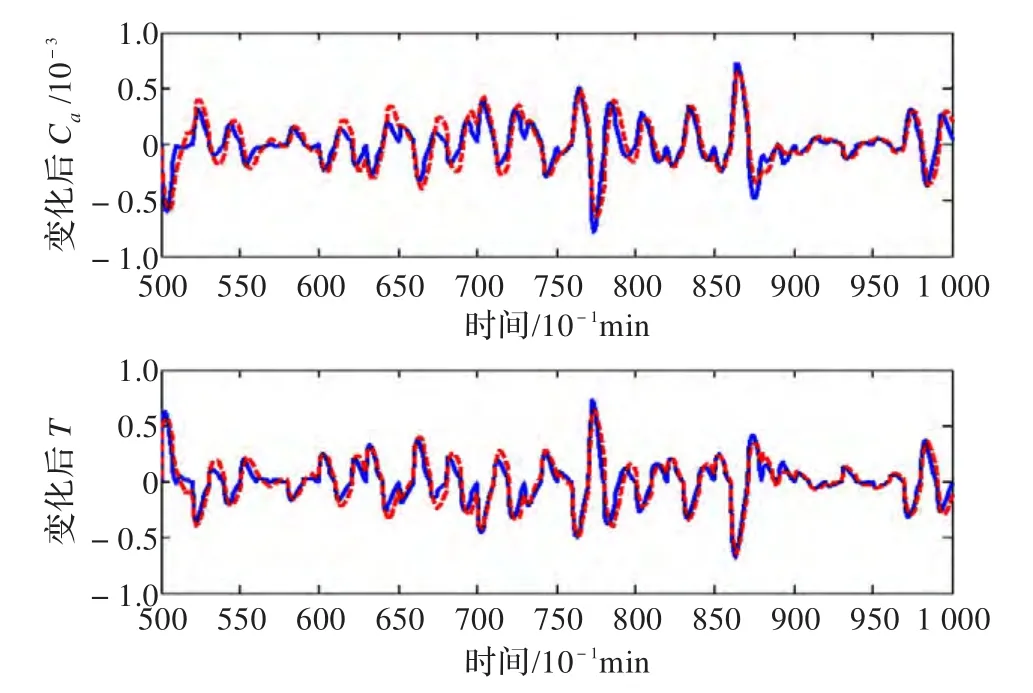
圖4 改進后CSTR系統數據(實)和預測輸出(虛)匹配驗證
為了進一步驗證改進前和改進后子空間辨識方法的辨識精度,引入預測誤差ε:
其中N為采樣數,j代表第j個系統輸出,yij和分別表示系統和模型的第j個系統輸出在第i時刻的值。改進前、改進后及利用文獻[9]方法得到的預測誤差見表2。
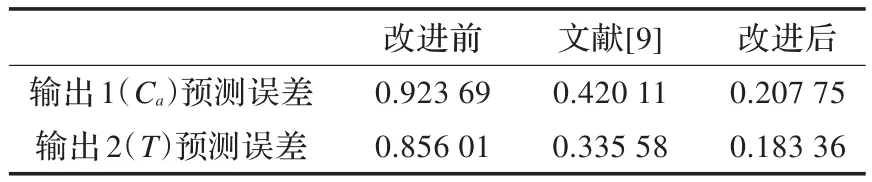
表2 改進前、改進后及文獻[9]方法的預測誤差比較
從表2中可以看出,相比改進前和文[9]方法得到的預測誤差,改進后的模型匹配誤差較小,辨識模型對系統輸出有著良好的預測能力。
6 結論
以CSTR系統為研究對象,以變換系統模型形式為基礎,提出了一種有色噪聲條件下的子空間辨識改進方法。該方法有效地克服了有色噪聲對系統的影響,減小了預測誤差。仿真結果表明,本文方法顯著提高了CSTR的辨識精度。
[1]羅小鎖,周國清,鄒濤.基于子空間辨識的狀態空間模型預測控制[J].計算機工程與應用,2012,48(19):234-237.
[2]Qin S J.An overview of subspace identification[J].Computers and Chemical Engineering,2006,30(10/12):1502-1513.
[3]Kameyama K,Ohsumi A.Subspace-basedpredictionof linear time-varying stochastic systems[J].Automatica,2007,43(12):2009-2021.
[4]李幼鳳,蘇宏業,褚健.子空間模型辨識方法綜述[J].化工學報,2006,57(3):473-479.
[5]鄒濤,丁寶蒼,張端.模型預測控制工程應用導論[M].北京:化學工業出版社,2010.
[6]Huang B,Kadali R.Dynamic modeling,predictive control and performance monitoring:a data-driven subspace approach[M].[S.l.]:Springer,2008.
[7]李永軍,馬立元,王天輝,等.一種加權頻域子空間模態參數辨識方法的改進[J].中國機械工程,2013,24(6):89-93.
[8]黎康,張洪華.基于高階累積量的閉環子空間辨識算法研究[J].宇航學報,2005,26[4]:415-419.
[9]竇偉,張湜,蔣楠,等.基于子空間方法的精餾塔系統辨識建模研究[J].計算機仿真,2009,26(4):109-112.
[10]Mardi N A,Wang L.Subspace-based model predictive control in a noisy environment[J].InternationalJournal of Process System Engineering,2009,2(1/2):61-69.
[11]羅小鎖.基于子空間辨識的預測控制方法研究[D].重慶:重慶大學,2011.
[12]吳平.基于子空間的系統辨識及其應用[D].杭州:浙江大學,2009.
[13]丁香乾,楊曉黎,楊華.非線性CSTR過程預測控制器設計[J].控制工程,2009,16(2):145-147.
[14]張輝,柴毅.一種改進的RBF神經網絡參數優化方法[J].計算機工程與應用,2012,48(20):146-149.
[15]Lu M,Jin C,Shao H.An improved fuzzy predictive control algorithm and its application to an industrial CSTR process[J].Chinese Journal of Chemical Engineering,2009,17(1):100-107.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
