MPPT在光伏LED照明系統中的應用
2015-04-14 00:47:26江陰職業技術學院電子信息工程系趙書紅
電子世界 2015年20期
關鍵詞:系統
江陰職業技術學院電子信息工程系 趙書紅
引言
采用太陽能作為一次能源用來照明是光伏發電的一種主要應用形式,而高效運用太陽能是人們一直追求的目標,其中最大功率點跟蹤(MPPT)技術是高效光伏發電系統中的關鍵技術之一。而在光伏電池供電系統中,光伏電池的內阻不僅受日照強度的影響,而且受環境溫度及負載的影響,所以光伏電池是一種極不穩定的電源。在工作時,由于光伏陣列的輸出特性受負載狀態、日照量、環境溫度等因素的影響而大幅變化,在一定的光照強度和環境下,光伏陣列可以工作在不同的輸出電壓下,但是只有在某一輸出電壓值時,光伏陣列的輸出功率才能達到最大,這時光伏陣列的工作點就達到了輸出功率電壓曲線的最高點,稱為最大功率點。因此,在光伏發電系統中,要提高系統的整體效率,一個重要的途徑就是實時調整光伏陣列的工作點,使其工作在最大功率點附近,這一過程就稱為最大功率點跟蹤[1]。
1 光伏LED照明系統
光伏LED照明系統是利用光伏電池將太陽能轉化為電能,再利用LED照明裝置將電能轉化為光能的系統。光伏陣列輸出直流電壓和電流,將電能存儲在蓄電池中,當需要照明時,再通過適當的控制由蓄電池向半導體燈具供電,一般電能需要經過電力電子變換器轉換后才能對LED燈進行供電,圖1為典型光伏LED照明系統框圖。
由圖1可知,光伏LED路燈系統包括太陽能電池板、充放電電路、蓄電池、LED負載以及系統的控制電路等部分。太陽能電池將太陽能轉化為電能并儲存在蓄電池中,充電電路通過控制DC/DC變換電路的開關占空比可以改變光伏陣列的輸出電壓和蓄電池的充電電壓,從而實現光伏電池板的MPPT和蓄電池恒壓充電的結合。同時,DC/DC變換電路將蓄電池的輸出電壓提升到LED的工作電壓,并通過控制開關的占空比調節LED負載的電流,實現LED的恒流控制。LED的驅動電路就是為了使端電壓和導通電流與LED的參數相匹配,既能達到開啟電壓使LED工作在發光狀態,又能對其電流進行嚴格控制,保持在設定的參考值下,從而保證系統能長期運行在可靠穩定的狀態下。
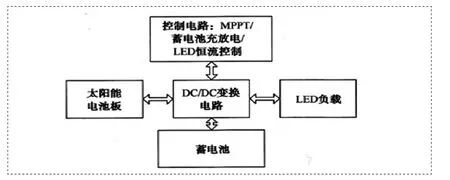
圖1 典型光伏LED照明系統框圖
光伏LED照明系統的綜合控制器是整個系統的核心部分,它能實現光伏陣列MPPT對蓄電池充電和蓄電池向LED放電的獨立控制,并能正確判斷何時需要提供照明,以在蓄電池充放電之間進行正確的切換。控制器不僅控制著整個系統的運行方式,還對蓄電池和LED的使用壽命有著至關重要的影響。
為了保證光伏陣列在任何日照和環境溫度下始終以相應的最大功率輸出工作,控制器需要對光伏電池進行MPPT,同時配合蓄電池的充電策略,為蓄電池提供最佳的充電電流和電壓,快速、平穩、高效地為蓄電池充電,并在充電過程中減少損耗,盡量延長蓄電池的使用壽命,同時還需要保護蓄電池,防止過充和過放現象的發生。
2 光伏LED照明系統的仿真建模
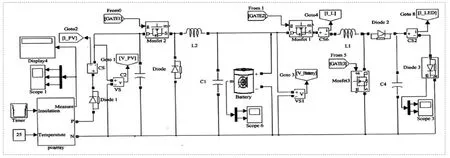
圖2 MATLAB/Simulink光伏LED照明系統的主電路模型
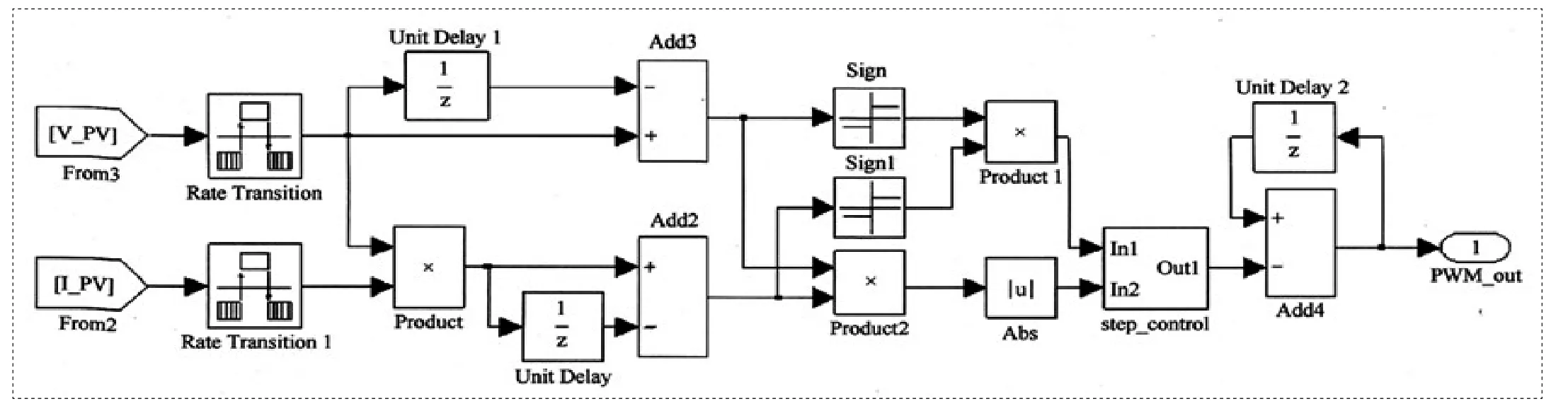
圖4 MATLAB/Simulink變步長干擾觀測法MPPT控制模型

圖5 MPPT控制仿真曲線
對光伏LED照明系統進行仿真建模,按照實際系統參數在MATLAB/Simulink中搭建系統的主電路模型,如圖2所示。圖中以蓄電池為分界點,左邊是光伏陣列輸出Buck電路,其作用是將輸出電壓轉換成能夠給蓄電池充電的適當電壓。右邊是LED驅動Boost電路,其將蓄電池的輸出電壓升高至能驅動LED器件正常工作。
光伏發電系統的最大功率點跟蹤(MPPT)控制方法有很多種,擾動觀察法由于其簡單易行,被測參數小,成本低,對硬件要求相對較低是目前應用和研究較為廣泛的一種MPPT方法[2]。本系統中采用了一種變步長干擾觀測法,其基本思想是加入步長變化的環節,在工作點遠離最大功率點區間內,設定擾動步長相對較大,在工作點接近最大功率點區間時,設定步長相對較小[2]。這樣既能在穩態時減小功率損失,又能在外界條件劇烈變化時提高動態響應和系統的穩定性,從而達到預期的控制效果。
光伏電池板的P-U曲線可以分為三段,如圖3所示。I段可以近似為一斜率為正值的直線,II段可近似為以最大功率點為中心對稱的正弦波,III段近似為一斜率為負的直線。根據變步長干擾觀測法的控制思想,在I段和III段采用大步長,而在II段采用小步長,就可以在跟蹤速度和減小穩態時功率損失之間折中[3]。
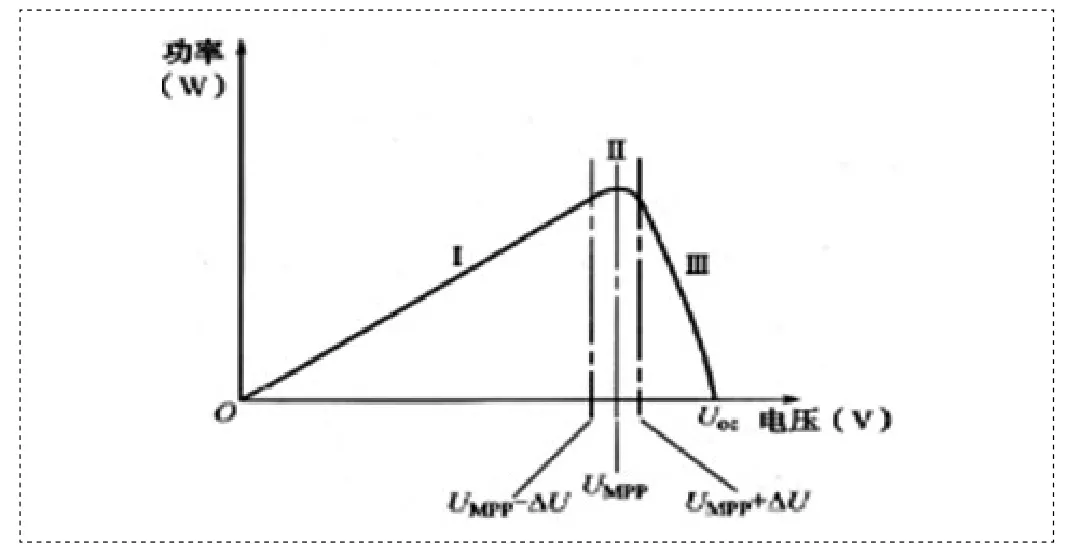
圖3 光伏電池板的三段式P-U曲線
采用變步長干擾觀測法MPPT控制模型如圖4所示。
模型中,控制器根據電壓、電流的采樣數據,換算出當前系統的電壓、電流和功率參數,判斷當前系統運行于I段、III段還是II段,并根據此來設定合適的擾動步長,控制系統的占空比數據,從而實現系統的MPPT控制。基于以上模型,設置PV輸出額定功率為300W,環境溫度為,改變光照強度分別為900W/m2、800W/m2、700W/m2和1000W/m2作為不同時刻的動態光照擾動,仿真波形如圖5所示。
圖5(a)中,在光照強度快速變化時,光伏電池的輸出電壓只有微小的波動,而輸出電流變化比較明顯,與理想MPPT跟蹤效果吻合,而且電流波形動態響應時間段、穩態波動小,體現出很好的控制性能。圖5(b)中,系統從開始運行經過一段時間穩定運行在最大功率點附近,當每次光照強度劇烈變化時,都能快速準確運行在新的最大功率點處,而波形在同一光照強度下的運行點變化范圍較小,在一定程度上解決了干擾觀測法在最大功率點附近
反復振蕩擾動和光照劇烈變化出現誤判的問題。
3 結束語
根據圖4所示模型,集成太陽能電池板、蓄電池組和LED等可構建成光伏LED照明系統。經過系統主電路及控制板的設計與實現,采用嵌入式目標模塊生成控制代碼,并由單片機實現系統控制,最后得到實際系統MPPT運行時的電壓、電流實驗波形,如圖6所示。
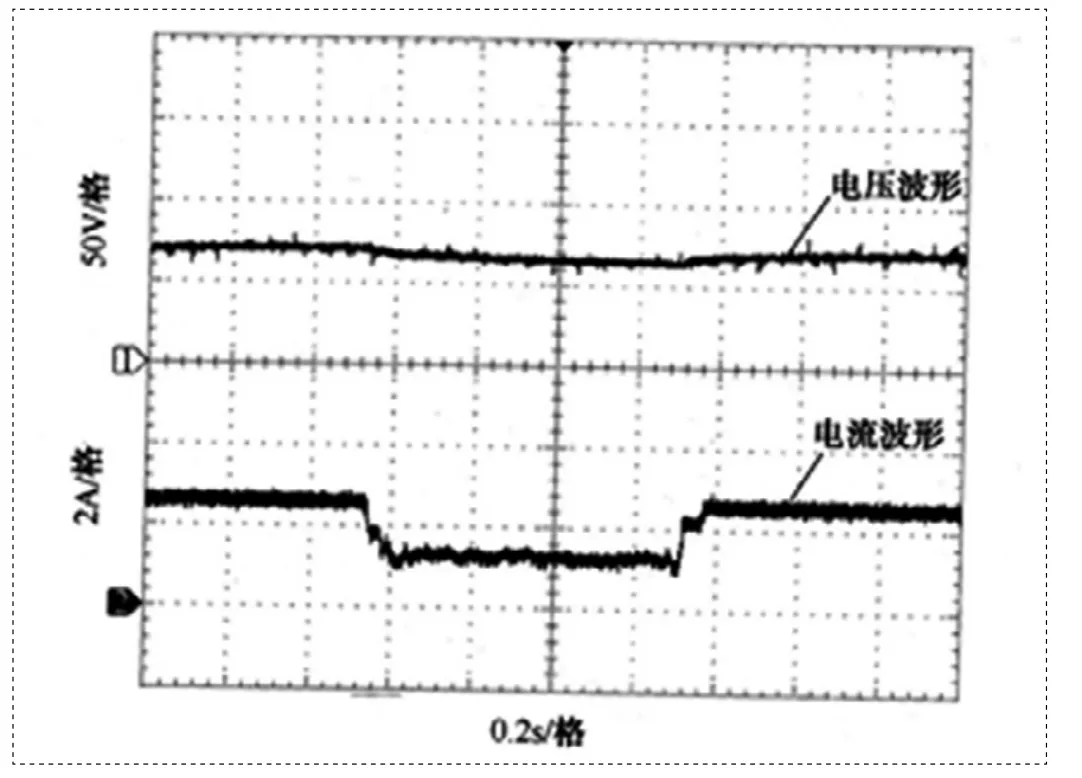
圖6 光伏LED照明系統中的MPPT實際運行時的實驗波形
由圖6可見,當光照強度發生較大變化時,光伏陣列輸出電壓變化較小,但電流變化較大,與理論分析和仿真結果一致。這也說明了,在實際應用中,變步長干擾觀測法的MPPT控制算法在光伏LED照明系統中能有效地進行控制輸出工作點,動態響應快,穩態誤差較小,具有一定的實用價值。
[1]楊晟,鄧峰.太陽能、風能發電技術[M].北京:電子工業出版社,2013,6.
[2]趙爭鳴,陳劍,孫曉瑛.太陽能光伏發電最大功率點跟蹤技術[M].北京:電子工業出版社,2012,4.
[3]李晶晶.光伏系統最大功率點跟蹤算法的研究與實現[D].桂林電子科技大學,2014.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32