用于激光測振的聚焦掃描系統(tǒng)
2015-04-13 09:31:08婁鑫鑫李華豐
計(jì)測技術(shù) 2015年2期
婁鑫鑫,李華豐
(中航工業(yè)北京長城計(jì)量測試技術(shù)研究所計(jì)量與校準(zhǔn)技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京100095)
0 引言
我國在激光測振方面,起步較早,研究面涉獵較廣,在理論和技術(shù)實(shí)現(xiàn)上均取得了一定進(jìn)展,但僅限于方法研究和試驗(yàn)系統(tǒng)的搭建,以滿足實(shí)驗(yàn)室校準(zhǔn)和測量應(yīng)用,將這些成果延伸到各種現(xiàn)場結(jié)構(gòu)、動(dòng)態(tài)性能的校準(zhǔn)與分析的研究工作則開展較少,缺乏試驗(yàn)現(xiàn)場復(fù)雜環(huán)境下的振動(dòng)測試能力[1]。由于激光測振儀系統(tǒng)復(fù)雜、技術(shù)含量高、涉及光機(jī)電算多門學(xué)科,因此尚未形成成熟的商業(yè)化產(chǎn)品,已研制的激光測振系統(tǒng)組件繁雜、集成化差、操作專業(yè)化程度高、缺少配套的硬件解調(diào)設(shè)備、系列化和標(biāo)準(zhǔn)化程度低,僅能作為具有研制性質(zhì)的非標(biāo)設(shè)備,用于一些特殊場合,滿足實(shí)驗(yàn)室科研和校準(zhǔn)應(yīng)用[2]。
近年來,單點(diǎn)式激光測振儀在我國已經(jīng)逐漸成型,但是其靈活度很低,測量不同的位置需要不斷移動(dòng)或者轉(zhuǎn)動(dòng)被測物,針對這種情況,本文介紹了一套可以進(jìn)行聚焦掃描的系統(tǒng),在掃描的同時(shí)進(jìn)行聚集以測量面內(nèi)各個(gè)點(diǎn)的振動(dòng)情況,從而改變單點(diǎn)式激光測振儀的測量范圍,達(dá)到更簡單快捷的范圍測量效果。
本系統(tǒng)的指標(biāo)為:掃描速度達(dá)到20 點(diǎn)/s;聚焦范圍≥0.3 m;能夠?qū)崿F(xiàn)對測量范圍內(nèi)高分辨力(與電機(jī)細(xì)分?jǐn)?shù)相關(guān))的測振。
1 掃描方案的比較和確定
根據(jù)掃描原理和各類實(shí)現(xiàn)掃描產(chǎn)品的特性,可以將現(xiàn)有的掃描方法分為兩種:單平面鏡掃描和雙平面鏡掃描[3]。對這兩種方法的優(yōu)缺點(diǎn)所做的總結(jié)分析見表1。
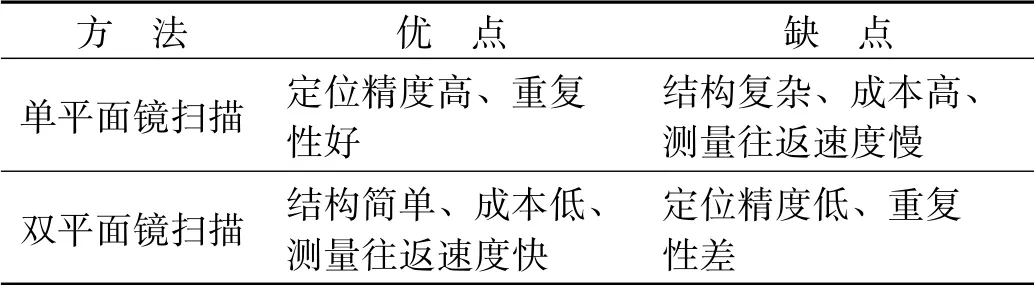
表1 掃描方法比較
單平面鏡掃描利用轉(zhuǎn)臺(tái)以及在轉(zhuǎn)臺(tái)上運(yùn)行軌跡與轉(zhuǎn)臺(tái)垂直的裝置使平面鏡能夠把入射光反射到一定的平面上,因此轉(zhuǎn)臺(tái)的轉(zhuǎn)動(dòng)慣量大。在對一個(gè)范圍內(nèi)多個(gè)點(diǎn)進(jìn)行掃描時(shí),需要裝置往返運(yùn)動(dòng),此結(jié)構(gòu)往返速度慢,達(dá)不到很高的測量速度,但同時(shí)其系統(tǒng)穩(wěn)定,有很好的定位精度與重復(fù)性。
對點(diǎn)的振動(dòng)進(jìn)行測量需要聚集,因此本系統(tǒng)在雙平面鏡掃描的基礎(chǔ)上增加了一個(gè)聚集結(jié)構(gòu)。聚焦掃描系統(tǒng)對掃描速度有一定的要求,測量一個(gè)范圍內(nèi)的點(diǎn)需要不斷往返運(yùn)動(dòng),所以,雙平面鏡掃描法可以作為首選方案。雙平面鏡掃描法裝置結(jié)構(gòu)簡單,通過步進(jìn)電機(jī)控制兩個(gè)空間上相互垂直的平面鏡旋轉(zhuǎn)來實(shí)現(xiàn)掃描,如圖1所示,兩個(gè)平面鏡的運(yùn)動(dòng)方向相互垂直。
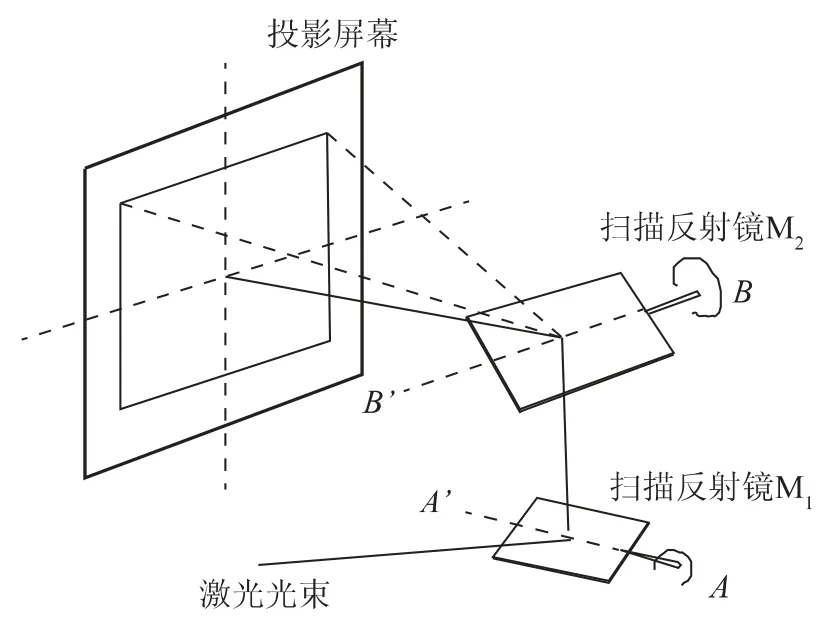
圖1 雙鏡掃描法
由圖1 可以看出,掃描反射鏡M1上的光斑位置不會(huì)變化,而掃描反射鏡M2上的光斑位置會(huì)有一定范圍的變化,因此M2的面積大于M1的面積,假設(shè)兩平面鏡軸向垂直距離為30 mm,掃描角度為±20°,由三角關(guān)系可知,反射鏡M2的長度至少為21.8 mm。最后選擇反射鏡尺寸為30 mm×40 mm×2 mm。
轉(zhuǎn)動(dòng)慣量公式[4]為
式中:J 表示轉(zhuǎn)動(dòng)慣量;m 表示反射鏡質(zhì)量;l 表示垂直于軸向的反射鏡長度。由轉(zhuǎn)動(dòng)慣量公式可以算出平面鏡及其固定裝置的轉(zhuǎn)動(dòng)慣量為J=3.77 g·cm2。根據(jù)最短加速時(shí)間30 ms 和最大轉(zhuǎn)速100 r/min,求出其最大角加速度β=348.889 rad/s2。
轉(zhuǎn)矩公式[5]為
T=Jβ
由轉(zhuǎn)矩公式可算出總轉(zhuǎn)矩T=3.77×10-7kg·m2×348.889 rad/s2=1.315 g·cm,據(jù)此選擇符合要求的28 兩相混合步進(jìn)電機(jī)。
2 光路的設(shè)計(jì)
本系統(tǒng)中的光路需要經(jīng)過聚焦系統(tǒng)與掃描系統(tǒng),考慮到整體的美觀性與光的出射位置,在聚焦系統(tǒng)與掃描系統(tǒng)中加了一塊反射鏡,不僅方便了光路的調(diào)試也使系統(tǒng)的整體布局更加合理。
根據(jù)激光的走向,可以設(shè)計(jì)出反射結(jié)構(gòu)的具體模型,如圖2所示。激光器與反射鏡之間的位置用來放置聚焦系統(tǒng),此系統(tǒng)不會(huì)改變激光的走向。
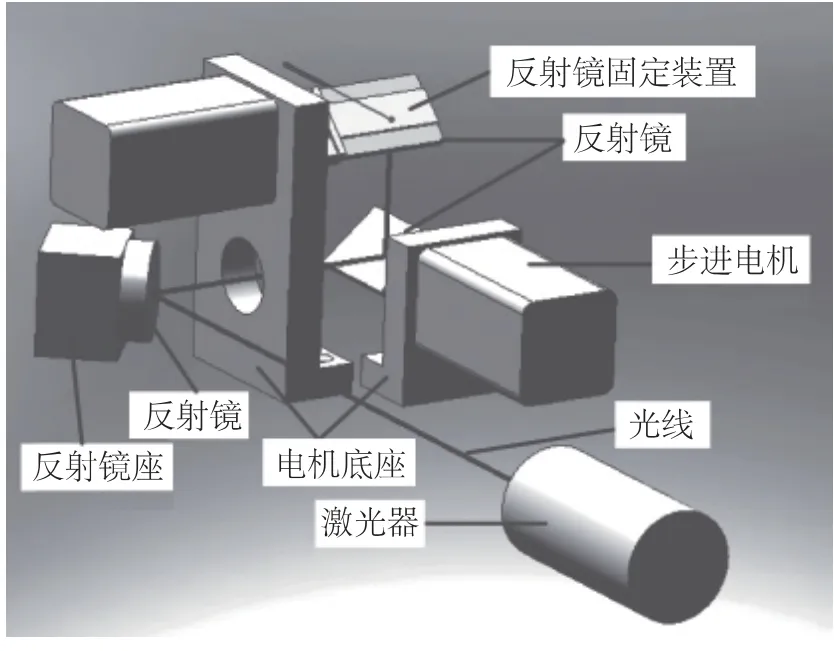
圖2 反射結(jié)構(gòu)及光路示意圖
在圖2所示的反射結(jié)構(gòu)的光路圖中,激光從激光器射出,第一個(gè)反射鏡的角度可以調(diào)節(jié),從而改變光的出射角度,使其能夠經(jīng)過兩個(gè)電機(jī)軸的軸線位置。此部分結(jié)構(gòu)的設(shè)計(jì)需要保證光線的高度,為了和單點(diǎn)式激光測振儀配合,設(shè)計(jì)的光線高度為47 mm,與單點(diǎn)式激光測振儀的激光高度等高,在設(shè)計(jì)步進(jìn)電機(jī)支撐座時(shí)使其垂直度在0.04 mm 內(nèi),以保證電機(jī)軸的水平度。
3 聚焦結(jié)構(gòu)的設(shè)計(jì)
本文所設(shè)計(jì)的聚焦系統(tǒng)聚焦范圍大于等于0.3 m。系統(tǒng)的聚焦部分由一個(gè)凹透鏡和一個(gè)凸透鏡組成的透鏡組來構(gòu)成,如圖3所示。透鏡1 選擇直徑為12.7 mm、焦距為-50.8 mm 的凹透鏡;透鏡2 和透鏡1 之間的最近距離設(shè)為a,透鏡2 能夠在導(dǎo)軌上移動(dòng)。
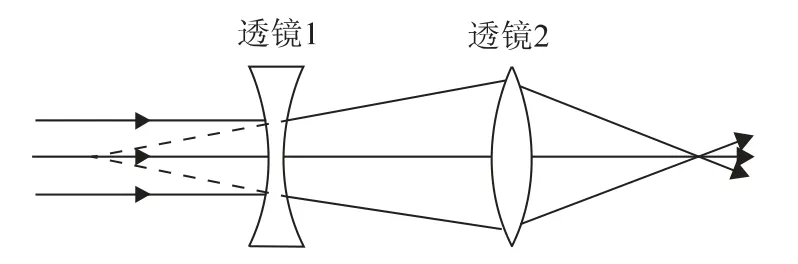
圖3 聚焦透鏡組
對于透鏡移動(dòng)部分的設(shè)計(jì)如圖4所示。此部分依靠步進(jìn)電機(jī)來實(shí)現(xiàn),步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)帶動(dòng)與聯(lián)軸器相連的絲杠轉(zhuǎn)動(dòng),從而帶動(dòng)滑塊部分做水平運(yùn)動(dòng)。由于滑動(dòng)部分是直線移動(dòng),因此對絲杠與導(dǎo)軌之間的平行度要求較高,保證平行度在0.04 mm 內(nèi)。
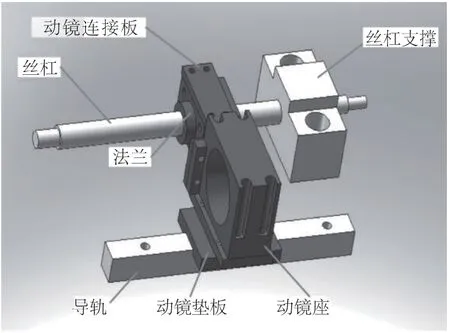
圖4 聚焦結(jié)構(gòu)的設(shè)計(jì)
根據(jù)透鏡成像的物像位置關(guān)系可列出方程組:
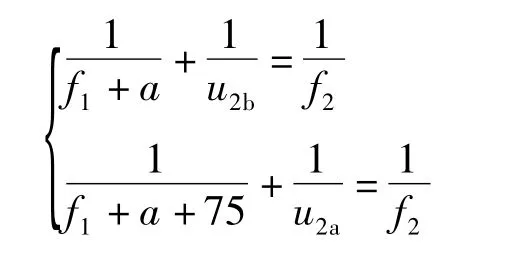
式中:f1為凹透鏡的焦距,f1=-50.8 mm;f2為凸透鏡的焦距;u2b為凸透鏡移動(dòng)前的像距;u2a為凸透鏡移動(dòng)后的像距。第一個(gè)式子中,透鏡的物距為凹透鏡的焦距與兩塊透鏡之間的最近距離之和f1+a,這個(gè)時(shí)候像距應(yīng)該為無窮大;在第二個(gè)式子中,設(shè)透鏡2 移動(dòng)了75 mm,這時(shí)應(yīng)該聚焦在盒體外0.3 m 處,因?yàn)楣馐枰?jīng)過反射鏡和透鏡,像距取500 mm。所以解得動(dòng)鏡座內(nèi)的透鏡焦距f2≈150 mm,兩塊透鏡之間的距離a≈100 mm。
整個(gè)聚焦部分的驅(qū)動(dòng)是靠步進(jìn)電機(jī)帶動(dòng)絲杠轉(zhuǎn)動(dòng)產(chǎn)生的,圖4 中深色部分為移動(dòng)部分,根據(jù)絲杠的轉(zhuǎn)動(dòng)而移動(dòng),在動(dòng)鏡座當(dāng)中放置所選透鏡,透鏡移動(dòng)使焦距發(fā)生變化。
4 總體結(jié)構(gòu)的設(shè)計(jì)
將所應(yīng)用的掃描方式和設(shè)計(jì)的聚焦結(jié)構(gòu)相結(jié)合,給出了聚焦掃描系統(tǒng)的總體結(jié)構(gòu)設(shè)計(jì)方案,如圖5所示。
5 V 的電源用于對電路進(jìn)行供電,12 V 的電源用于對步進(jìn)電機(jī)控制器進(jìn)行供電,總共有三個(gè)步進(jìn)電機(jī)控制器分別控制三個(gè)步進(jìn)電機(jī),步進(jìn)電機(jī)依靠固定裝置固定在底座上,固定裝置所用材料為45 號(hào)鋼。本系統(tǒng)的總體尺寸為292 mm×182 mm×131 mm。
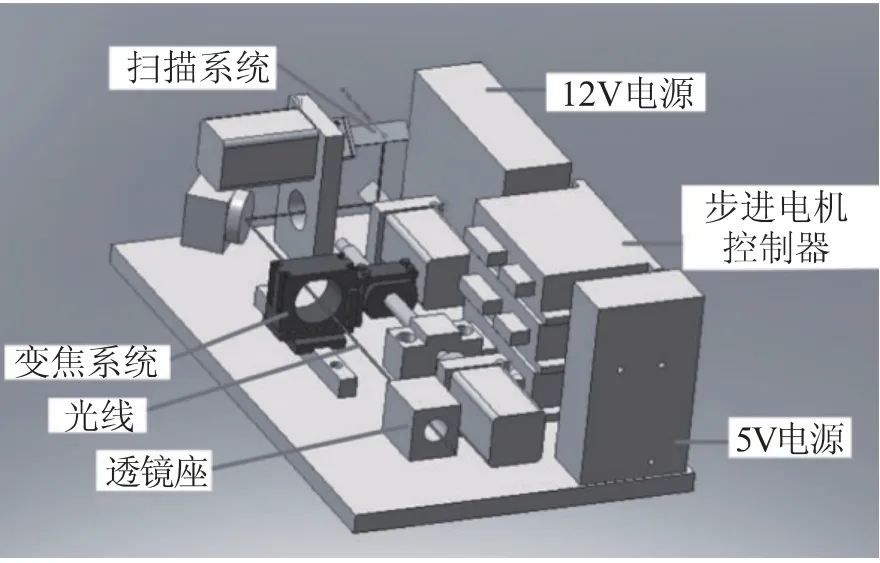
圖5 總體結(jié)構(gòu)示意圖
設(shè)計(jì)總體結(jié)構(gòu)時(shí),選擇了128 細(xì)分的步進(jìn)電機(jī)控制器,可以使步進(jìn)電機(jī)運(yùn)行一步的轉(zhuǎn)動(dòng)角度為0.84',在測量距離較近(小于3 m)的情況下,可以看做能夠?qū)y量范圍內(nèi)每一點(diǎn)的振動(dòng)進(jìn)行測量。
5 掃描步驟
用聚集掃描系統(tǒng)掃描的同時(shí)需要保證能夠聚焦,因此在使用軟件控制時(shí)需至少確定三個(gè)點(diǎn),通過三次選擇光點(diǎn)位置并聚焦來確定掃描平面及其平面方程。其掃描步驟如圖6所示。
根據(jù)三點(diǎn)確定平面方程并通過求解方程得到當(dāng)控制光點(diǎn)位置的電機(jī)移動(dòng)時(shí)控制焦距的電機(jī)相應(yīng)移動(dòng)的步數(shù),在掃描時(shí)光點(diǎn)每移動(dòng)一次同時(shí)調(diào)節(jié)焦距,這樣能夠在進(jìn)行掃描的同時(shí)達(dá)到聚焦。
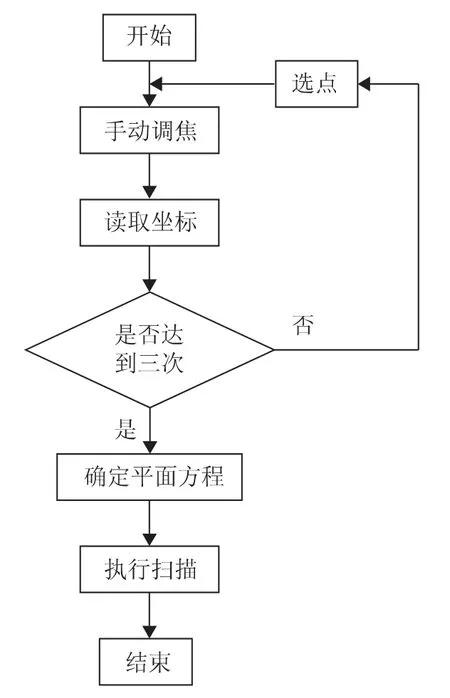
圖6 掃描系統(tǒng)流程圖
6 實(shí)驗(yàn)
6.1 焦距的測量
圖7 為驗(yàn)證聚焦范圍的裝置,實(shí)驗(yàn)選用JDSU 的He-Ne 激光器,其激光束直徑為3 mm,近似準(zhǔn)直光,對測定的實(shí)驗(yàn)結(jié)果影響微弱。在進(jìn)行實(shí)驗(yàn)時(shí)調(diào)節(jié)透鏡2 的位置,當(dāng)光束聚集時(shí),用光束分析儀測量光斑直徑為50 μm,動(dòng)鏡再往任何一個(gè)方向移動(dòng)光斑都會(huì)變大,根據(jù)此方法可以確定本裝置的聚焦范圍大于等于0.3 m。
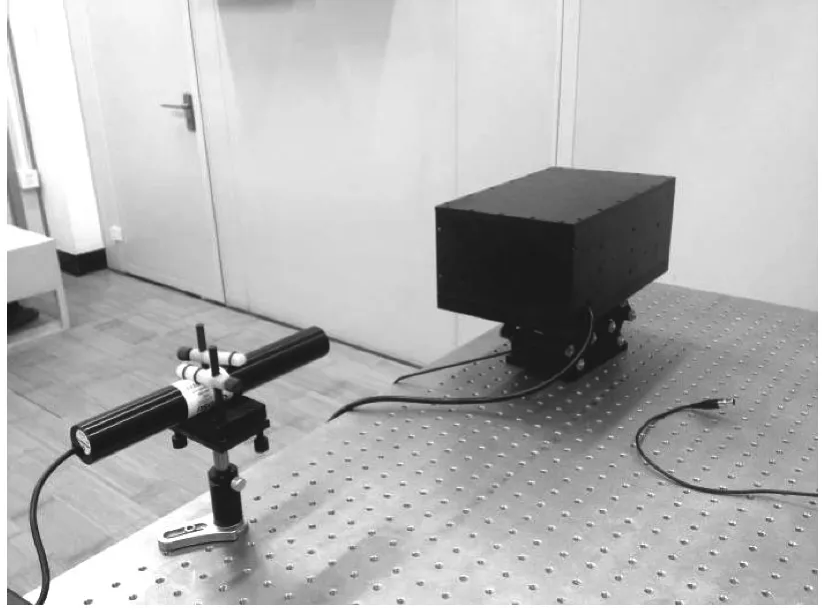
圖7 實(shí)驗(yàn)裝置
6.2 掃描速度的測量
本系統(tǒng)的掃描速度指標(biāo)為20 點(diǎn)/s。實(shí)驗(yàn)采用的方法是根據(jù)多次測量掃描總體時(shí)間來計(jì)算其掃描速度。多次測量的情況如表2所示。
在編寫的程序中設(shè)定的掃描點(diǎn)數(shù)為橫軸和縱軸各40 個(gè)點(diǎn),總共一次掃描1600 個(gè)點(diǎn)。根據(jù)表2 可以得出掃描速度平均為20.3 點(diǎn)/s,因此能夠達(dá)到提出的20點(diǎn)/s 的指標(biāo)。
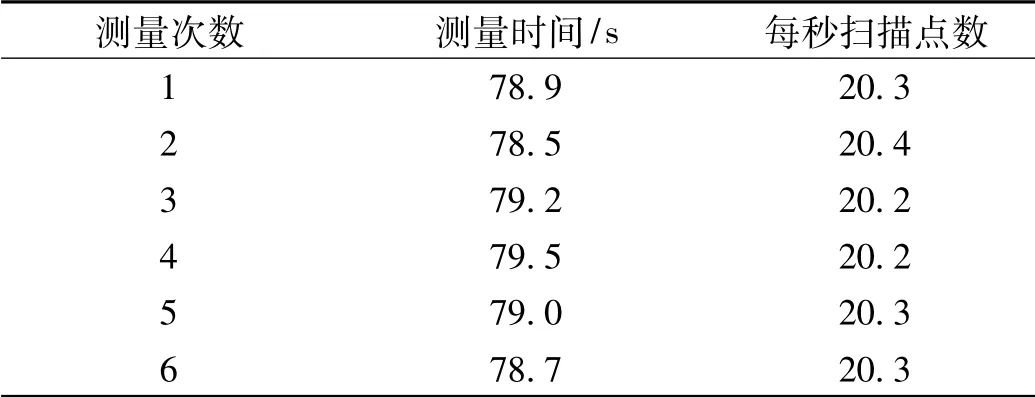
表2 掃描速度的統(tǒng)計(jì)時(shí)間表
6.3 與單點(diǎn)式激光測振儀配合測量
本系統(tǒng)主要應(yīng)用于單點(diǎn)式激光測振儀,因此需要與激光測振儀配合進(jìn)行實(shí)驗(yàn)。圖8所示為搭建的實(shí)驗(yàn)裝置,其中主要包括單點(diǎn)式激光測振儀、聚焦掃描系統(tǒng)、示波器和反射鏡。實(shí)驗(yàn)中用反射鏡模擬被測物,把它分別放在不同距離的各個(gè)位置,在距離系統(tǒng)0.1,0.3,0.5 m 的位置進(jìn)行測量,都可以得到如圖9所示的波形,且經(jīng)過一定的調(diào)整之后可以調(diào)節(jié)到與之接近的幅值。此即為單點(diǎn)式激光測振儀接收到的波形,其幅值表示接收到的信號(hào)強(qiáng)度,測振儀出射的激光頻率為40 MHz,在經(jīng)過物體表面反射后,根據(jù)被測物的振動(dòng)速度接收到的光頻會(huì)發(fā)生相應(yīng)變化,再通過解調(diào)系統(tǒng)便可以得出物體的振動(dòng)參數(shù)。
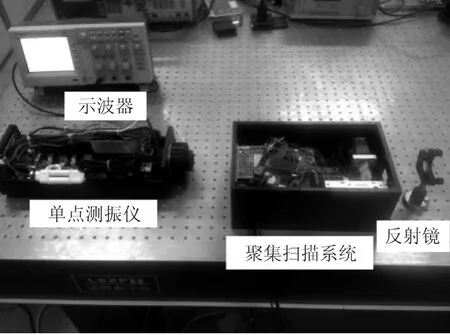
圖8 與測振儀配合測量示意圖
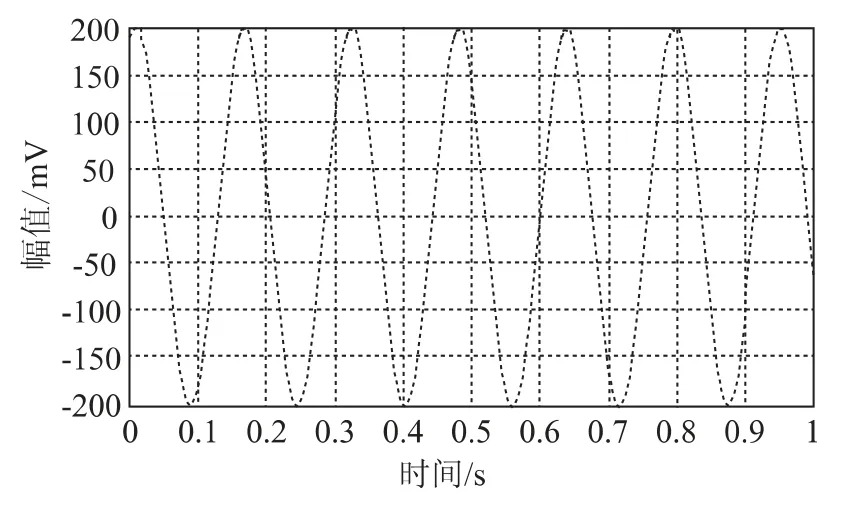
圖9 示波器接收到的波形
7 結(jié)論
通過對聚焦掃描系統(tǒng)的分析和設(shè)計(jì),構(gòu)建了一套完整的用于激光測振的聚焦掃描系統(tǒng);設(shè)計(jì)了系統(tǒng)機(jī)械構(gòu)架,通過預(yù)留尺寸和手動(dòng)調(diào)整保證光路在經(jīng)過聚焦系統(tǒng)時(shí)的直線度,并通過實(shí)驗(yàn)驗(yàn)證了該系統(tǒng)的可行性。本文設(shè)計(jì)的聚焦掃描系統(tǒng)成本低、操作簡便,能夠改變?nèi)肷錅y振光光線的角度并聚焦,具有很好的實(shí)用性。
[1]孫太東.激光掃描技術(shù)的發(fā)展及其應(yīng)用[J].光機(jī)電信息,2000,17(5):1-8.
[2]張合富,朱振宇,朱國勤.激光測振儀校準(zhǔn)技術(shù)評述[J].計(jì)測技術(shù),2014,34(6):5-8.
[3]張會(huì)霞,朱文博.三維激光掃描數(shù)據(jù)處理理論及應(yīng)用[M].北京:電子工業(yè)出版社,2012.
[4]吳柏師.大學(xué)物理學(xué)[M].北京:高等教育出版社,2012.
[5]湯蘊(yùn)璆,羅應(yīng)立,梁艷萍.電機(jī)學(xué)[M].北京:機(jī)械工業(yè)出版社,2008.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45