基于擴展卡爾曼濾波的輪轂電機驅動電動汽車狀態(tài)估計
2015-04-13 09:12:50陳瑤李以農韓家偉
汽車工程學報 2015年1期
陳瑤 李以農 韓家偉
摘 要:以非線性八自由度車輛模型為基礎,利用輪轂電機驅動電動汽車四輪轉矩容易獲得的獨特優(yōu)勢,將車輪轉角、各個車輪驅動力矩、側向加速度及橫擺角速度作為算法輸入,采用擴展卡爾曼濾波(Extended Kalman Filter,EKF)理論設計了輪轂電機驅動電動汽車行駛中狀態(tài)估計算法。CarSim和Matlab/Simulink聯合仿真結果表明,該算法能有效估計輪轂電機驅動電動汽車行駛中的縱向車速、側傾角、側傾角速度等狀態(tài)。
關鍵詞:輪轂電機驅動電動汽車;擴展卡爾曼濾波;狀態(tài)估計;聯合仿真
中圖分類號:U 461.6文獻標文獻標識碼:A文獻標DOI:10.3969/j.issn.2095-1469.2015.01.03
時代飛速發(fā)展,汽車工業(yè)崛起的同時也帶來了環(huán)境污染、噪聲污染和能源危機等系列問題。輪轂電機驅動電動汽車以其高效化、能源利用多元化及對環(huán)境友好且容易實現智能化控制等優(yōu)勢,成為現今的研究熱點。但是,輪轂電機驅動電動汽車本身的一些局限性[1]影響其在行駛過程中的平順性、操縱穩(wěn)定性及安全性,解決這類問題的方法除了改進輪邊驅動系統(tǒng)的本體設計外,還可以開發(fā)一套適合輪邊驅動系統(tǒng)的特殊控制策略。但是進行主動車身控制、主動側傾控制及其它穩(wěn)定性、安全性控制,需要實時獲取車輛在行駛過程中的車身位移及加速度響應、車身側傾等重要信息作為車身姿態(tài)集成控制的反饋信號。
目前針對輪轂電機驅動電動汽車的狀態(tài)估計研究已有多種方法及結果。文獻[2]通過改進的模糊邏輯的方法加權計算得到最終車速,但沒有考慮加速度輸入的誤差累積,車速估計結果曲線不平滑,抖動偏大;文獻[3]以四輪三自由度車輛模型為基礎,設計了基于無跡卡爾曼濾波(Unscented Kalman Filter,UKF)理論的車輛狀態(tài)估計算法,通過HSRI輪胎模型計算輪胎的縱向及側向力,而輪胎模型中的縱滑剛度和側偏剛度通過五組數據擬合得到,不夠精確,且估計模型未考慮側傾運動對車輛行駛的影響。
為了減少加速度誤差及部分參數擬合誤差對估計結果的影響,同時能估計更多的車輛狀態(tài),并且能有效利用輪轂電機驅動電動汽車各個車輪的驅動轉矩、轉速可實時獲知的優(yōu)勢,本文以非線性八自由度車輛模型和“魔術公式”輪胎模型為基礎,設計擴展卡爾曼濾波的狀態(tài)估計算法,通過車輪旋轉模型計算輪胎的縱向力,輪胎的側向力采用“魔術公式”輪胎模型計算,避免HRSI輪胎模型中縱滑剛度和側偏剛度的擬合誤差。
1 車輛狀態(tài)估計模型
1.1 整車模型
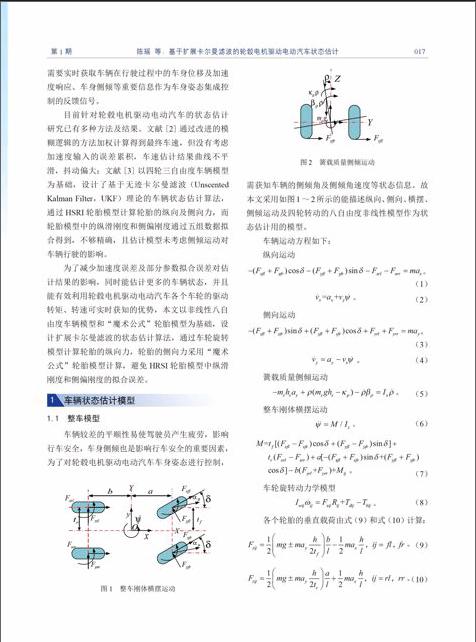
車輛較差的平順性易使駕駛員產生疲勞,影響行車安全,車身側傾也是影響行車安全的重要因素,為了對輪轂電機驅動電動汽車車身姿態(tài)進行控制,需獲知車輛的側傾角及側傾角速度等狀態(tài)信息。故本文采用如圖1~2所示的能描述縱向、側向、橫擺、側傾運動及四輪轉動的八自由度非線性模型作為狀態(tài)估計用的模型。
車輛運動方程如下:
縱向運動
。
。
側向運動
。
。
簧載質量側傾運動
。
整車剛體橫擺運動
。
車輪旋轉動力學模型
。
各個輪胎的垂直載荷由式(9)和式(10)計算:
。
。
各個輪胎側偏角為
。
。
式中,vx,vy分別為整車縱向、側向速度;分別為側傾角及橫擺角;為前輪轉角;tf,tr分別為前后輪距的一半;m,ms分別為整車質量和簧載質量;a,b分別為質心至前后軸的距離;h,hs分別為質心高度和懸掛質心高度;Fxij,Fyij分別為各個輪胎的縱向力和側向力,ij表示4個車輪fl,fr,rl,rr;κρ為側傾剛度;βρ為側傾阻尼;Ix,Iz分別為整車繞x,z軸的力矩; Tdij,Tbij,Mij分別為各個車輪的驅動力矩、制動力矩和回正力矩。
1.2 輪胎模型
輪轂電機驅動電動汽車由驅動電機直接驅動,具有精確和快速的力矩響應,驅動力矩容易獲得且能單獨控制等特點,利用其力矩可以直接測量通過式(8)求得車輛在行駛過程中的縱向力。
本文采用魔術公式[4]來計算車輛行駛過程中的側向力及回正力矩,忽略水平和垂直方向的漂移,計算公式如下:
。
式中,Y表示輸出的側向力及回正力矩,不同輸出量的B,C,D,E表達式見參考文獻[5]。
2 擴展卡爾曼濾波算法
擴展卡爾曼濾波是通過泰勒級數展開,忽略高階分量的方式對非線性系統(tǒng)進行線性化近似,轉換為普通的卡爾曼濾波。由式(1)~(12)構成以下非線性系統(tǒng):
。
。
狀態(tài)變量:
系統(tǒng)輸入:
觀測向量:
式中,w(t)和v(t)為系統(tǒng)噪聲和測量噪聲,假設二者為零均值的白噪聲,且互不相關;f[x(t), u(t)]和h[x(t)]為非線性函數。
通過求解雅可比矩陣對模型進行線性化處理,
, ,采用歐拉算法對系統(tǒng)進行離
散化:
。
狀態(tài)轉移矩陣,
為采樣時間。
擴展卡爾曼濾波算法步驟如下[6-7]。
狀態(tài)預測:
誤差協(xié)方差預測:
計算卡爾曼增益:
狀態(tài)更新:
誤差協(xié)方差更新:
3 仿真驗證
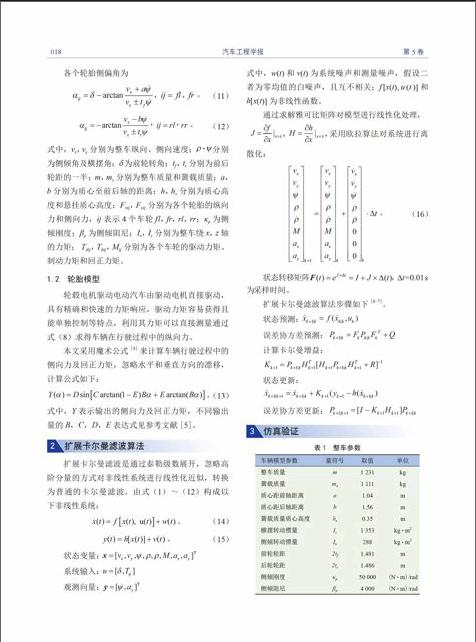
為了驗證本算法的估計精度,通過商用軟件CarSim和Matlab/Simulink聯合仿真驗證。整車參數見表1。
3.1 雙移線工況
估計算法的初始值取,,,采用CarSim中的雙移線工況,其行駛路徑及前輪轉角如圖3所示。
EKF算法的輸入由CarSim的輸出,并疊加零均值的隨機噪聲來模擬傳感器測量噪聲,如圖4所示。
將前輪轉角、各個車輪轉矩Tij、橫擺角速度及側向加速度ay,如圖3(b)、圖4所示,作為EKF算法的輸入,雙移線仿真工況下由EKF算法估計得到輪轂電機驅動電動汽車的縱向車速vx、側傾角、側傾角速度及縱向加速度ax,如圖5所示。
采用EKF算法估計的輪轂電機驅動電動汽車狀態(tài)變量的絕對誤差如圖6所示。
從圖中可以看出,在初始車速為80 km/h的雙移線工況下,除ax外,其它各個狀態(tài)變量的估計絕對誤差值均比較小,均在狀態(tài)幅值的10%以內。vx的估計隨時間的積累誤差越來越大,這是由于沒有縱向信息作為測量量來修正。由圖5(d)和圖6(d)可以看出,在仿真開始時ax的估計值與仿真值相差較大,這都會影響vx的估計。此外,在EKF算法線性化處理過程中忽略了泰勒級數展開式中的高階項,此部分的未建模動態(tài)難以直接補償,導致系統(tǒng)產生較大誤差。
3.2 階躍轉向工況
估計算法的初始值取,,,采用CarSim中的階躍轉向仿真工況,車輛行駛路徑及前輪轉角如圖7所示。
算法的其它輸入量如圖8所示。
該工況下,采用EKF算法估計得到輪轂電機驅動電動汽車的各個狀態(tài)變量如圖9所示。
階躍工況下,采用EKF算法的估計結果的絕對誤差如圖10所示。
階躍轉向工況下,初始車速為60 km/h時,由圖9和圖10可以看出,采用EKF算法能有效估計車輛行駛中的各個狀態(tài)。與雙移線工況類似,vx和 ax的估計誤差要大些。
兩種仿真工況結果表明,利用輪轂電機驅動電動汽車各個車輪的驅動轉矩來計算輪胎縱向力,采用EKF算法估計其行駛中的各個狀態(tài)量,具有較好的估計性能。
4 結論
本文基于EKF理論建立了輪轂電機驅動電動汽車的狀態(tài)估計器。
(1)以八自由度車輛模型和“魔術公式”輪胎模型為基礎,采用EKF算法對輪轂電機驅動電動汽車進行狀態(tài)估計。CarSim和Matlab/Simulink的聯合仿真結果表明,EKF算法能有效估計輪轂電機驅動電動汽車的行駛狀態(tài),估計結果除了ax以外,估計誤差絕對值在狀態(tài)幅值的10%以內。
(2)利用輪轂電機驅動電動汽車各個車輪的驅動力矩容易獲得的優(yōu)勢,直接根據車輪旋轉模型計算輪胎的縱向力,簡化了對輪胎力的估計計算。
(3)進一步研究應進行實車試驗,用于驗證算法的準確性,并為輪轂電機驅動電動汽車主動安全系統(tǒng)的開發(fā)和實際應用提供技術支持。
