基于多體動力學的4WID-4WIS電動車運動學建模與逆運動學仿真*
2015-04-12 05:32:57董鑄榮任少云李占玉胡松華
汽車工程 2015年3期
關鍵詞:模型
董鑄榮,任少云,賀 萍,李占玉,胡松華
(1.北京交通大學機電控制工程學院,北京 100044; 2.深圳職業技術學院汽車與交通學院,深圳 518055)
?
2015045
基于多體動力學的4WID-4WIS電動車運動學建模與逆運動學仿真*
董鑄榮1,2,任少云2,賀 萍2,李占玉2,胡松華2
(1.北京交通大學機電控制工程學院,北京 100044; 2.深圳職業技術學院汽車與交通學院,深圳 518055)
基于多體動力學理論和集成建模方法,建立了14自由度的四輪驅動、四輪轉向電動車運動學模型。基于所建模型,進行典型工況的運動學仿真和車輛運動的參數化分析,仿真結果可以建立所設計制造的電動車各個車輪協調的基準數據庫。
電動汽車;四輪驅動;四輪轉向;逆運動學;多體動力學
前言
在四輪獨立驅動四輪獨立轉向(4WID-4WIS)電動車輛發展過程中,相似車型和先期類型車輛得到了研究和發展,例如具有兩個獨立輪轂電機車輪的前驅或后驅車輛(2WD)和4個獨立輪轂電機的四驅車輛(4WD)。
文獻[1]中對具有保留傳統轉向系統的獨立輪轂電機驅動車輪的車輛提出了一種控制策略和算法,該算法得到了實車測試驗證,所建立的控制算法能改進車輛的駕駛性能;文獻[2]中對4WD車輛提出了3個層次的控制策略,建立了針對駕駛靈活性、側向穩定性和防側滾的車輛驅動控制算法;文獻[3]中對輪轂電機車輪失效的冗余控制算法進行了分析;文獻[4]中分析和建立了針對4WIS車輛轉向模型,并對轉向的協調與控制算法進行研究;文獻[5]中運用矢量場方位理論分析了具有四輪驅動四輪轉向的農用車輛的協同控制;文獻[6]中針對前軸驅動的機器人的運動軌跡跟蹤和定點目標跟蹤分析得到了一種統一控制算法;文獻[7]中基于系統識別理論針對兩輪摩托車運動軌跡跟蹤開展了研究;文獻[8]中針對理論驅動輪轂電動汽車不同電機控制算法的優缺點,提出了一種多模式電機控制算法;文獻[9]中針對有人駕駛AWID-AWIS車輛中的整車動力學控制問題,對不同駕駛意圖下的車輛運動進行控制仿真;文獻[10]中提出了一種針對自適應巡航控制的遺傳算法。
本文中通過對4WID-4WIS車輛結構的描述和拓撲構型的研究,建立了基于多體動力學理論和集成建模方法的整車正逆運動學模型。在模型基礎上,對典型運動工況進行了仿真分析,進一步完成模型車輛參數化運動分析。仿真結果可以建立所設計制造的電動車各個車輪和車身之間完成準確協調控制的基準數據。
1 4WID-4WIS電動車運動學建模
在多體系統理論中,針對4WID-4WIS電動車可以定義從輪轂電機車輪運動引起到車身運動為正運動學研究,反之為逆運動學研究[11]。多體運動學建模可以提供統一的正逆運動學分析。仿真結果對于車輪協同控制、整車運動軌跡跟蹤和定點運動跟蹤控制等都是必要的研究內容。
1.1 4WID-4WIS電動車多體運動學分析
圖1所示為研究的4WID-4WIS電動車。用OXYZ表示大地慣性坐標,O0X0Y0Z0表示固結在整車質心位置的車身坐標,OiXiYiZi(i=1,2,…,22)表示固結在各運動零部件質心位置的本體坐標。在模型中各類運動鉸的存在決定了整車模型運動特性。表1為運動學整車模型中各零部件定義。
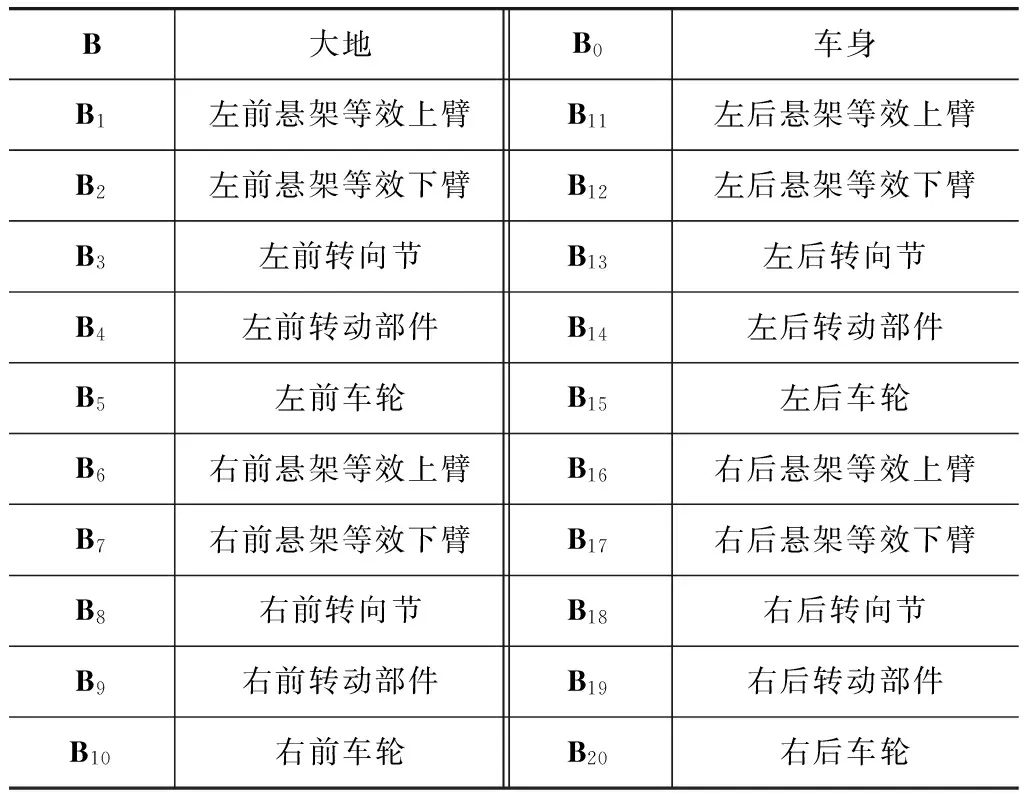
表1 模型中各零部件定義
4WID-4WIS電動車拓撲結構如圖2所示,模型中包括了轉鉸、球鉸和一般鉸3類運動鉸約束(H1,H2,…,H28)。4WID-4WIS電動車運動模型自由度(DOF)為
δ=6×n-5×nj1-3×nj2-0×nj3=14
式中:n為整車模型零部件數;nj1為整車模型轉鉸數;nj2為整車模型轉球數;nj3為整車模型一般鉸數。
1.2 1/4整車建模
所研究的4WID-4WIS電動車底盤結構左右對稱,前后懸架采用相同結構,可以取整車1/4部分進行建模,首先選取左前輪部分1/4整車建模。
在多體理論中,兩零部件Bα和Bβ之間轉鉸Hj可以表達為
(1)
(2)
(3)
選取左前輪1/4整車模型坐標陣為
約束坐標陣為
(4)

1.3 整車運動學模型集成

組集的整車主約束陣用帶下標K字母表示為
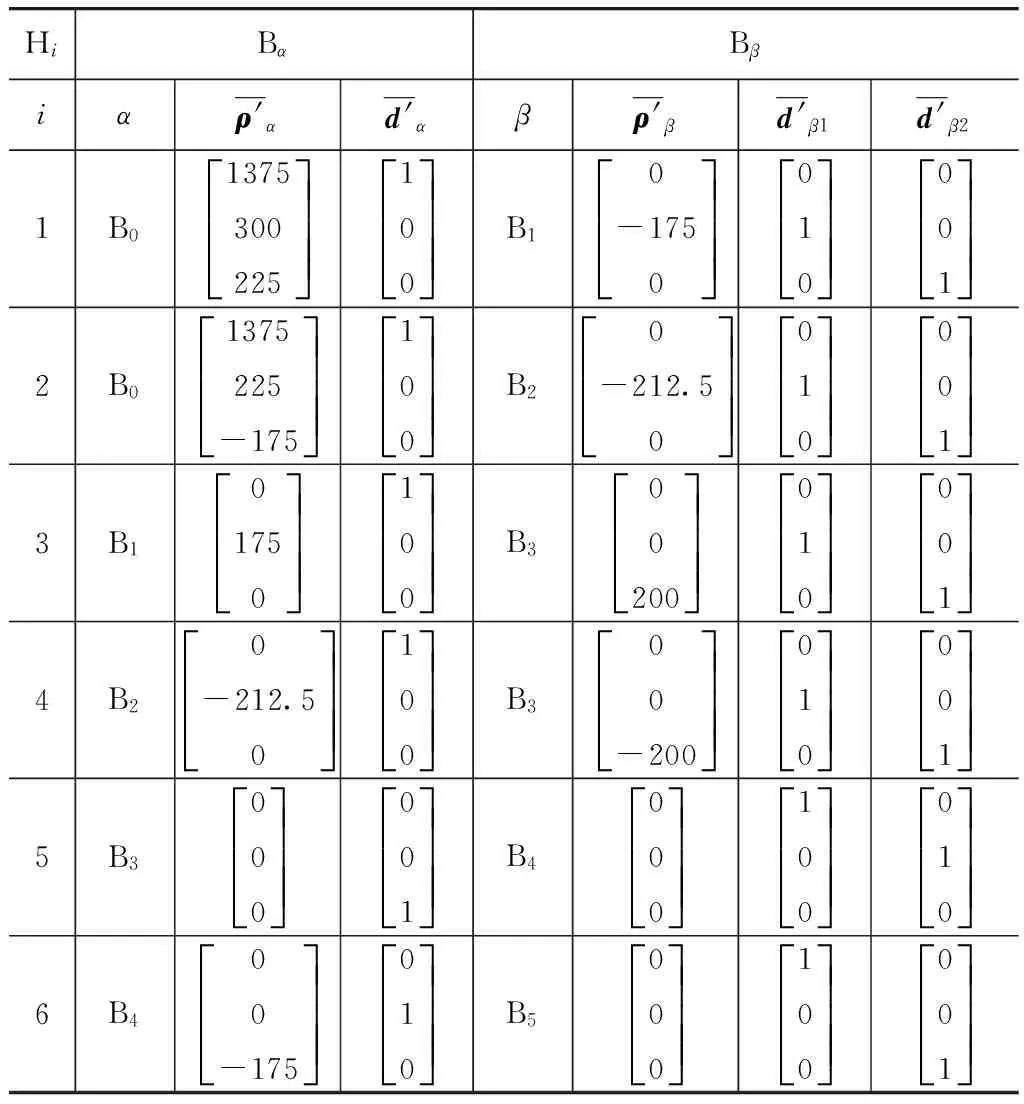
表2 1/4整車模型參數值
(5)
1.4 整車運動學模型求解
在整車逆運動學分析中,通過給定車輪滑轉率,得到反映輪轂驅動電機轉角的車輪轉角變量θi(i=5,10,15,20)矩陣為
(6)
反映轉向電機轉鉸變化的各轉向節轉角應無幾何干涉,無干涉約束陣為
(7)
假定整車運動軌跡,即整車運動軌跡坐標陣為
(8)
式(6)~式(8)給出了驅動約束子陣,共包含14個解析方程,驅動約束用帶下標D字母表示,集成為
(9)
式(5)和式(9)組集可以得到整車約束陣為
(10)
(11)
(12)
4WID-4WIS電動車逆運動學數值迭代流程圖如圖3所示,計算流程如下。
步驟4:通過設定運算時間T和迭代步長Δt,t1=t0+Δt,t2=t1+Δt,…,ti=T,通過上述步驟的循環迭代計算,可以完成4WID-4WIS電動車逆運動學數值迭代計算。
2 4WID-4WIS電動車逆運動學仿真分析
利用Adams及其solver完成軌跡跟蹤的4WID-4WIS電動車仿真,仿真結果能為整車子控制系統研究提供基礎數據。過曲線和直線行駛是車輛行駛的常用典型工況,理想的車輪純滾動驅動行駛要求車身與驅動和轉向電機之間精確協調。在不同車速和轉彎半徑下,只有車輪運動協調的準確仿真計算才能為滿足整車各子系統控制算法要求提供可能。
2.1 典型工況仿真分析
選取4WID-4WIS電動車勻速6km/h通過半徑為5m的曲線行駛工況,仿真運動軌跡如圖4所示。在過曲線行駛末端,左前驅動輪偏離質心軌跡最大值為139.58mm。在進入曲線行駛初期,左后驅動輪偏離質心軌跡最大值為146.06mm,而右后驅動輪偏離質心軌跡值為113.26mm。在車輛行駛通過半圓曲線15.96°~63.88°之間即在1 413.84~4 717.92mm整體坐標X方向上,整車狀態變量變化緩慢,表明各車輪滑轉率是很小的常值,整車行駛處于穩定狀態。
圖5為整車質心和各車輪運動速度。在過曲線行駛始端,各車輪運動速度相對整車質心速度變化劇烈,在某些極端工況下,此時可能引起車輪滑轉顯著。在過曲線行駛過程中,各車輪需要的平均車速不同。右后驅動輪在1 666.67~1 831.96mm/s間變化,左后驅動輪在1 666.67~1 588.69mm/s間變化。圖6為各車輪運動速度相對整車質心速度變化量。
通過給定各車輪滑移率值和滾動半徑值,可計算在該典型過曲線工況下驅動輪轂電機轉角和角速度時間歷程,如圖7所示。由圖可見:在4個驅動車輪中,右后驅動輪平均驅動角速度變化最大,從4.76到5.23再回到4.76rad/s,左后驅動輪平均驅動角速度變化最小,從4.76到4.53再回到4.76rad/s。
所建仿真模型同樣可以計算出轉向電機控制的車輪轉角的變化歷程,如圖8所示。由圖可見:在過曲線行駛始端,各車輪轉角變化劇烈,左后輪從0變化到-0.479 8rad或27.49°,右后輪從0變化到-0.338 8rad或19.41°,左前輪從0變化到0.450 7rad或25.82°,右后輪從0變化到0.317 4rad或18.19°;相對車身的轉角變化分別為從0變化到-0.316 6,-0.244 3,0.295 1和0.233 3rad。在行駛過程中前后左側車輪轉角值都大于對應右側車輪轉角值,在仿真行駛時間t=5.32s時,相對轉角變化值為0,車輛完成了過曲線行駛工況。圖7和圖8的逆運動學模型仿真結果可以提供完成該過曲線行駛工況下電機的追蹤控制目標值。
2.2 4WID-4WIS電動車運動參數化分析
通過對4WID-4WIS電動車勻速6km/h通過半徑為5m的曲線行駛工況的仿真,得到圖5~圖8結果。該仿真結果可以提供完成該過曲線行駛工況下電機的追蹤控制目標值。通過參數化選取不同車速,通過模型同樣仿真出上述狀態變量變化歷程。通過運動參數化仿真分析可以得出以下結論。
(1) 無論如何改變行駛車速,為了能完成規定的5m半徑過曲線運動,各車輪都必須保持各自轉角和相對轉角為常值,如圖9所示。
(2) 當選取車速等幅值數增加時,如取6、10、14、18、22和26km/h,可得到各車輪相對整車質心速度也按各自的等幅值數增加,右后輪幅值絕對值最大,所以在某種極端轉彎工況下,4WID-4WIS電動車外側后輪最容易出現顯著滑轉現象。
(3) 隨著車速等幅值數增加時,完成過曲線行駛工況時間也相應減少。通過計算過曲線工況所需時間的加速遞減趨勢,可得出極限點在0.85s,此時車速為47.3km/h。如果車速超出47.3km/h,車輛不能完成5m半徑勻速過曲線行駛工況,這種現象說明車輛動能過大,須制動才能降低整車動能,保證完成期望的勻速過曲線行駛工況,如圖10所示。本模型的仿真為冗余整車能量的回收提供了一種控制可能策略。
當4WID-4WIS電動車制造完成,在非載荷情況下整車質心位置不變。由于乘客和貨物的負荷不同,整車質心位置會有所變化。通過4WID-4WIS電動車質心位置參數化仿真計算,得到各車輪相對整車質心的相對速度和相對轉角時間歷程,在此不再累牘。
3 結論
通過運用多體理論和集成建模方法,建立了4WID-4WIS電動車運動學模型。通過仿真計算得到很多明確結論。
給定車輪滑轉率,在典型過曲線和直線行駛工況下,所建模型可以仿真計算軌跡跟蹤4WID-4WIS電動車軌跡跟蹤的動態特性。
運用模型參數化分析方法,通過對在典型過曲線不同車速參數化分析,仿真計算結果能為實現車輪驅動、車輪轉向和整車運動之間精確協同控制提供跟蹤目標。模型也可以預測過曲線最大穩定車速,為冗余能量回收提供一種控制策略。
本文是有關4WID-4WIS電動車運動軌跡跟蹤、定點運動等整車控制的前期研究。選取不同曲線半徑和不同行駛車速,模型仿真計算結果可以生成4WID-4WIS電動車驅動數據庫即驅動MAPS圖,通過數據擬合和查表方式,可為車輛運動精確協同控制提供跟蹤目標。
[1] Kim J, Park C. Control Algorithm for Independent Motor-Drive Vehicle[J]. IEEE Transactions on Vehicular Technology,2010,59(7):3213-3221.
[2] Kang J, Yoo J. Driving Control Algorithm for Maneuverability, Lateral Stability and Rollover Prevention of 4WD Electric Vehicles With Independently Driven Front and Rear Wheels[J]. IEEE Transactions on Vehicular Technology,2011,60(7):2987-3001.
[3] Wang R, Wang J. Fault-Tolerant Control with Active Fault Diagnosis for Four-Wheel Independently Driven Electric Ground Vehicles[J]. IEEE Transactions on Vehicular Technology,2011,60(7):2987-3001.
[4] Lam T L, Qian H. Omnidirectional Steering Interface and Control for a Four-Wheel Independent Steering Vehicle[J]. IEEE/ASME Transactions on Mechatronics,2010,15(3):329-338.
[5] Liu C, Wang M. Coordinating Control for an Agricultural Vehicle with Individual Wheel Speeds and Steering Angles[J]. IEEE Control System Magazine,2008,57(5):21-25.
[6] Dao T, Chen C K. A Unified Approach to Inverse and Direct Kinematics for Four Kinds of Wheeled Mobile Robots and Its Applications[J]. In Proceedings of the 1996 IEEE International Conference on Robotics and Automation Minneapolis,1996,45(3):3458-3465.
[7] Dao T K, Chen C K. Path Tracking Control a Motorcycle Based on System Identification[J]. IEEE Transactions on Vehicular Technology,2011,60(7):2927-2935.
[8] 盧東斌,李建秋,等.四輪輪轂電機驅動電動汽車無刷電機控制算法的研究[J].汽車工程,2012,34(10):871-893.
[9] 阮久宏,李貽斌,等.有人駕駛AWID-AWIS車輛動力學控制研究[J].山東大學學報(工學版),2010,40(1):10-14.
[10] 裴曉飛,劉昭度,等.一種汽車巡航控制的分層控制算法[J].北京理工大學學報,2012,32(5):479-483.
[11] 洪嘉振.計算多體系統動力學[M].北京:高等教育出版社,2009.
Kinematics Modeling and Inverse Kinematics Simulation ofa 4WID/4WIS Electric Vehicle Based on Multi-body Dynamics
Dong Zhurong1,2, Ren Shaoyun2, He Ping2, Li Zhanyu2& Hu Songhua2
1.SchoolofMechanical,ElectronicandControlEngineering,BeijingJiaotongUniversity,Beijing100044;2.SchoolofAutomotiveandTransportationEngineering,ShenzhenPolytechnic,Shenzhen518055
Based on the theory of multi-body dynamics and integrated modeling method, a 14 DOF kinematics model for a four-wheel drive/four-wheel steering electric vehicle is built. On the basis of the model built, a kinematics simulation and a parametric analysis on vehicle movement in typical conditions are conducted. With the results of simulation, a baseline database can be established for the coordination between wheels of electric vehicle designed and produced.
electric vehicle; four wheel drive; four wheel steering; inverse kinematics; multi-body dynamics
*廣東省自然科學基金(S2013010013931)和深圳市基礎研究項目(JCYJ20120617135920233)資助。
原稿收到日期為2014年3月4日,修改稿收到日期為2014年5月23日。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19