一種基于超聲和射頻融合的無線傳感器網絡網格定位方法*
2015-04-08 06:41:19何風行陳文權苑廣欣
傳感器與微系統 2015年3期
姜 華, 何風行, 陳文權, 毛 嘉, 苑廣欣
(中國科學院 上海高等研究院 城市公共安全中心,上海 201210)
一種基于超聲和射頻融合的無線傳感器網絡網格定位方法*
姜 華, 何風行, 陳文權, 毛 嘉, 苑廣欣
(中國科學院 上海高等研究院 城市公共安全中心,上海 201210)
提出了一種基于超聲和射頻融合的網格定位方法。首先對射頻的無線信號強度進行篩選,采用壓縮感知方法進行粗定位。然后基于粗定位結果對超聲測量的計時結果進行評價和加權,以抵抗局部非視距(NLoS)環境影響。之后再迭代時進行進一步精細定位與超聲計時結果的評價加權,直至達到終止條件。測試結果顯示:所提出的融合定位方法的定位精度優于經典的CHAN算法,在實際測試中取得較好的定位性能。
無線傳感器網絡; 融合定位; 壓縮感知; 網格定位
0 引 言
室內復雜場景下的目標定位問題越來越引起學者關注[1,2],由于室內不具有GPS信號覆蓋,基于無線傳感器網絡(WSNs)的系統是解決室內目標定位問題的主要方法[3~5],其中基于射頻的接收信號強度(RSS)[2~5]和超聲波[6,7]是常用的定位手段, RSS定位成本低廉、部署方便,但是定位精度較差,一般在m級;室內超聲定位精度較高,文獻[6]在室內無遮擋的情況下達到了10 cm以內的定位精度,但是由于室內復雜環境的限制,受非視距(NLoS)影響較為嚴重。
本文提出了一種基于超聲和射頻融合定位的方法,以抵抗室內復雜環境的影響。首先將基于RSS的定位問題轉換為壓縮感知問題,得到粗定位結果,然后根據粗定位結果對超聲測量結果進行篩選,消除局部NLoS環境影響,根據優選結果迭代進行超聲網格精細定位。測試結果顯示:本文提出的方法具有較好的定位效果。
1 系統總體設計
1.1 系統模型
系統模型如圖1所示,設需要定位的區域為室內一矩形區域,將此矩形區域劃分為N個網格。此區域中移動目標周期性發射射頻信號和超聲信號,在區域周圍布設M個傳感器節點,可接收超聲和射頻信號,每個傳感器節點的位置為已知。傳感器節點將信號測量結果(RSS值和到達時間(ToA)值)發送給融合中心。融合中心運行網格融合定位算法,計算出目標位置。

圖1 采用超聲和射頻融合的網格定位系統模型
1.2 算法架構
超聲和射頻融合定位算法的整體架構如圖2所示,首先采用Fisher準則進行RSS測量結果篩選,然后壓縮感知方法進行RSS粗定位,根據粗定位結果和ToA結果匹配、評價、加權,進行超聲信號的網格精細定位。

圖2 超聲和射頻融合定位算法的整體架構
2 射頻信號網格粗定位壓縮感知算法
2.1 壓縮感知
假設已知測量矩陣Φ∈RM×N(M?N)和某未知信號X∈RN在采用該測量矩陣時的線性測量值Y∈RM
YM×1=ΦM×NXN×1.
(1)
Y也可以看作信號X在測量矩陣Φ下的線性投影。壓縮感知主要解決的問題是由測量結果Y重構信號X。由于X的維數遠大于Y的維數,這是一個欠定線性方程組求解問題,有無窮多解。但是,壓縮感知理論證明,如果信號X是K稀疏的,并且Y與Φ滿足一定條件,信號X可以由測量值Y通過求解l1范數最小的最優化問題精確重構[8,9]
X=argmin‖X‖1,s.t.ΦX=Y.
(2)
2.2RSS測量結果篩選
由于室內無線信道受多徑等因素影響,空間某一位置的RSS測量結果在一定范圍內波動。為了去除RSS異常值帶來的定位偏差,在離線情況下,采用Fisher準則對RSS結果進行評價[10],排除掉異常傳感器節點帶來的影響
(3)
式中φi,j為傳感器節點i接收到的位于參考點j的目標發射的RSS值,分子的含義為RSS在不同參考點測量值的變化幅度,衡量了傳感器節點區分不同參考點的能力,數值越大區分度越強。Δi,j為傳感器節點在不同時刻接收同一位置參考點RSS值的方差,分母的含義為衡量了傳感器節點RSS的時間穩定性,分母越小表示測量結果在時域上更穩定。
2.3 壓縮感知問題建模
文獻[5]建立了壓縮感知定位模型。系統的壓縮采樣過程可用式(4)描述,xn=0或1(1≤n≤N),當第n個網格中有目標時,xn=1;否則,xn=0。傳感器的測量結果Y為測量矩陣與稀疏向量X的乘積,其物理意義為傳感器節點ym(1≤m≤M)接收到的目標信號強度。
(4)
式(4)簡記為
YM×1=PM×NXN×1.
(5)
根據上面的模型,基于RSS的目標定位問題轉換為壓縮感知問題。可以運用l1范數最小等重構算法求出問題的解。測量矩陣P的生成有兩種辦法:一種方法是采用信號衰減模型生成測量矩陣,適用于室內環境理想的情況;另一種方法是根據實際測試結果得到測量矩陣,適用于室內環境復雜的情況。本文采用后一種方法,根據各網格參考點中的目標信號進行實際測試得到測量矩陣。
2.4 壓縮感知貪婪匹配重構算法
壓縮感知重構算法可分為以下五類[11]:貪婪追蹤法、凸松弛法、貝葉斯法、非凸優化法和窮舉法。貪婪追蹤法和凸松弛法有較完備的理論基礎,成為應用最多的兩種方法。凸松弛法性能比較穩定,但計算量大;貪婪追蹤法實現簡單,運行時間短,但需要一定量的先驗信息。本文采用貪婪匹配算法[12],定位算法設計如下:
輸出:重構信號X
1)初始化,匹配余量y′=y,重構結果X=0,支撐集為全部網格N;
2)求解如下優化問題,其中,z為稀疏度為1的列向量(只有第i個元素的值為zi,其余元素均為0)
3)如果z≠0,則y′=y′-Pz,X=X+z,支撐集減去當前網格,跳轉到第2步;
4)信號重構結束,重構結果為X。
上述算法通過求余量y′與測量矩陣中各原子的相關性進行信號逼近和余量更新,保證了每次迭代的最優性,迭代次數最大為N。
3 超聲信號網格精細定位算法
3.1 對抗局部NLoS影響的超聲節點信號篩選
4.家庭教育方式不當。家長過度的嘮叨、責罵、猜疑、嘲諷甚至動之以拳腳或不切實際的加大學習量,使學生有可能產生抵觸情緒進而演化為厭學情緒。
超聲的傳播速度約為340 m/s,超聲飛行時間(time of flight,ToF)測量精度可以達到μs級,所以,超聲定位精度一般明顯高于RSS定位。但由于室內環境的復雜性,NLoS對超聲定位結果有很大影響。文獻[13]對室內環境下超聲波傳輸特性進行了詳細研究,分類如下:
1)無遮擋情況(視距傳播):如圖3中的目標和傳感器節點B1,這種情況下ToF測量誤差小于0.15 %,主要是溫差對聲速的影響,如果溫度相差5 ℃,誤差約為1 %。
2)輕微遮擋(遠處):如圖3中的目標和傳感器節點B2,這種情況下誤差具有一定的隨機性,最大誤差約為5 %。
3)較嚴重遮擋(近處):如圖3中的目標和傳感器節點B3,這種情況下誤差和遮擋物距離非常相關,最大誤差可能達到10 %~100 %。
4)嚴重遮擋(完全遮擋):如圖3中的目標和傳感器節點B4,這種情況下無ToF測量結果,或為噪聲、干擾觸發的無意義的結果。
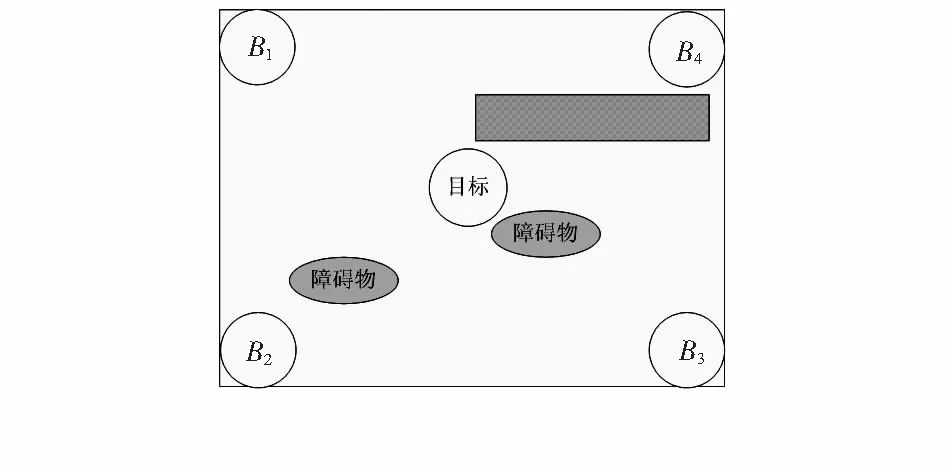
圖3 室內環境對超聲傳輸的影響
本文假設受NLoS影響的是少數傳感器節點,大部分傳感器節點和目標之間是視距路徑。利用RSS粗定位結果,對超聲信號的ToA結果進行評價和加權,對抗局部NLoS影響
(6)
式中 wi為傳感器節點i的權重,x為RSS粗定位結果與傳感器節點i的ToA結果之間的偏差。當偏差小于閾值a(約為網格大小),對應為視距傳播情況,評價結果為“good”,權重為1;當偏差大于閾值b(約為2倍網格大小),對應為嚴重遮擋情況,評價結果為“bad”,權重為0;當偏差介于a~b之間,評價結果為待定,按照式(6)計算權重值,介于0~1之間。
3.2 超聲信號網格定位方法
超聲信號網格定位方法如圖4所示,由粗到精的迭代進行網格定位。網格大小的初值取為RSS粗定位網格大小,面積每次縮小為1/4。

圖4 超聲信號網格定位方法
目標函數為加權的定位偏差最小

(7)
上述目標函數最優化求解迭代進行。初值根據粗定位結果得到,wi為權重值,di為測量結果得到的距離值,d0為根據上次迭代定位結果得到的距離值。終止條件為達到期望精度或目標網格內有效ToA結果小于閾值。
4 實驗驗證
4.1 測試平臺
實驗室環境下基于自研硬件平臺進行了實際測試,圖5(a)為傳感器節點,每個節點包含射頻收發模塊與數據處理模塊,數據處理模塊采用意法半導體ARMCortexM3系列STM32F103VG處理器,射頻模塊采用德州儀器CC1101射頻芯片。每個節點含2只MIC,相距1m。圖5(b)為超聲和射頻發射節點,每個節點含3只超聲揚聲器,互成120°夾角。

圖5 超聲和射頻融合定位硬件平臺
4.2 定位性能
實驗室大小為8m×12m,由于實驗臺、機柜、人員走動,存在NLoS路徑。在墻壁上部署了6個傳感器節點,如圖6。參數設置為:粗定位網格大小為2m。超聲評價閾值的初值a=1.5m,b=3m。人員移動路線和定位結果見圖6。定位偏差最大為50cm左右,原因是由于該處超聲信號被嚴重遮擋。

圖6 超聲和射頻融合定位結果
對本文提出的融合算法和經典的CHAN算法的定位性能進行了對比,如圖7所示。在相同測試環境下(有2個節點存在遮擋),本文算法的定位誤差小于15cm,CHAN算法的定位誤差小于45cm。不同定位環境下的定位效果對比如表1所示。本文算法采用射頻和超聲融合,對超聲信號進行篩選、加權,剔除了局部NLoS影響,取得了更好地定位效果。

圖7 累積誤差分布對比

表1 不同室內環境情況下定位精度對比
5 結 論
室內定位有著重要和廣泛的應用場景。本文利用超聲和射頻融合進行無線傳感器網絡網格定位,系統易于部署,測試結果表明:本文提出的融合定位方法的定位精度優于經典的CHAN算法,在具有局部NLoS路徑的室內實際環境下取得了較好的定位效果。
[1] 高云峰,周 倫,呂明睿,等.自主移動機器人室內定位方法研究綜述[J].傳感器與微系統,2013,32(12):1-6.
[2] Paramvir Bahl,Venkata N Padmanabhan.RADAR:An in-building RF-based user location and tracking system[C]∥Proceedings of INFOCOM 2000,Israel,2000:775-784.
[3] Lee Hojae,Lee Sanghoon,Kim Yeonsoo,et al.Grouping multi-duolateration localization using partial space information for indoor wireless sensor networks[J].IEEE Transactions on Consumer Electronics,2009,55(4):1950-1958.
[4] 孫 妍,陶正蘇,陳德富.基于無線傳感器網絡的室內精確定位算法[J].傳感器與微系統,2009,28(5):99-102.
[5] 何風行,余志軍,劉海濤.基于壓縮感知的無線傳感器網絡多目標定位算法[J].電子與信息學報,2010,23(3):347-353.
[6] 韓 霜,羅海勇,陳 穎,等.基于TDOA的超聲波室內定位系統的設計與實現[J].傳感技術學報,2010,34(3):716-721.
[7] 劉 君,吳建國,褚曦丹.Cricket室內定位系統的研究與改進[J].計算機技術與發展,2011,21(5):206-209.
[8] Donoho D L.Compressed sensing[J]. IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[9] Candes E,Romberg J,Tao T.Robust uncertainty principles:Exact signal reconstruction from highly incomplete frequency informa-tion[J].IEEE Transactions on Information Theory,2006,52(2):489-509.
[10] 馮 辰.基于壓縮感知的RSS室內定位系統的研究與實現[D].北京:北京交通大學,2011.
[11] Tropp J A,Wright S J.Computational methods for sparse solution of linear inverse problems[C]∥Proceedings of the IEEE,2010,98(6):948-958.
[12] Zhang Bowu,Cheng Xiuzhen.Sparse target counting and localization in sensor networks based on compressive sensing[C]∥INFOCOM,Shanghai,China,2011:10-15.
[13] Casas R,Marco A,Guerrero J J,et al.Robust estimator for non-line-of-sight error mitigation in indoor localization[J].European Association for Signal Processing Journal on Applied Signal Processing,2006,6(2):156-163.
A method of grid localization in WSNs using fusion of ultrasonic and radio frequency*
JIANG Hua, HE Feng-hang, CHEN Wen-quan, MAO Jia, YUAN Guang-xin
(Center for Urban Public Safety,Shanghai Advanced Research Institute,Chinese Academy of Sciences,Shanghai 201210,China)
A grid localization method using fusion of ultrasonic and radio frequency is proposed.Firstly,wireless signal strength is screened for coarse localization by compressed sensing model.Then,timing results of ultrasonic measurement are evaluated and weighted based on coarse localization results,to conquer effect of local NLoS environment.Further,fine localization is performed and weighted by evaluation of ultrasonic timing result by iteration algorithm,until the termination condition is reached.Test results show that the proposed method achieves better localization precision than classical CHAN algorithm,and better localization property is achieved in practical test.
WSNs; fusion localization; compressed sensing; grid localization
10.13873/J.1000—9787(2015)03—0024—04
2014—07—09
國家電網公司科技計劃資助項目
TP 393
A
1000—9787(2015)03—0024—04
姜 華(1977-),男,山東威海人,博士,副研究員,研究方向為無線傳感器網絡、物聯網。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
