基于GT的鐘差預(yù)測(cè)模型輔助GPS定位算法研究
2015-03-28 06:11:44劉伯鴻靳文軍徐志奇
測(cè)繪工程 2015年5期
關(guān)鍵詞:模型
劉伯鴻,靳文軍,徐志奇
(蘭州交通大學(xué) 自動(dòng)化與電氣工程學(xué)院,甘肅 蘭州730070)
GPS定位系統(tǒng)是一種高精度、快速度的連續(xù)定位系統(tǒng)。目前該系統(tǒng)已經(jīng)在車(chē)輛定位、地殼運(yùn)動(dòng)監(jiān)測(cè)、變形監(jiān)測(cè)等諸多領(lǐng)域得到了廣泛應(yīng)用[1]。利用GPS系統(tǒng)進(jìn)行定位時(shí),用戶接收機(jī)只有接收到至少4顆以上的衛(wèi)星時(shí)才能實(shí)現(xiàn)定位解算。而在峽谷或城市樓群環(huán)境中信號(hào)易受到遮擋而只接收到3顆衛(wèi)星時(shí),利用傳統(tǒng)的定位算法無(wú)法實(shí)現(xiàn)接收機(jī)的定位解算[2]。通常都是利用慣性導(dǎo)航系統(tǒng)、虛擬衛(wèi)星以及地圖匹配等輔助GPS定位,在一定程度上解決了3顆衛(wèi)星無(wú)法定位的問(wèn)題,但是以上方法需要額外增加 硬 件 設(shè) 備,增 加 了 定 位 成 本[3-5]。本 文 利 用GPS接收機(jī)在定位時(shí)提供的接收機(jī)鐘差數(shù)據(jù)輔助GPS定位,該方法只需要在接收機(jī)的內(nèi)部嵌入相應(yīng)的算法而不需要增加額外的硬件設(shè)備。在受到強(qiáng)烈的環(huán)境干擾的情況下依然可以實(shí)現(xiàn)接收機(jī)的定位解算功能。
灰色系統(tǒng)是用來(lái)解決信息不完備系統(tǒng)的數(shù)學(xué)方法[5],本文將GPS接收機(jī)鐘差序列的變化過(guò)程看做是一個(gè)灰色系統(tǒng),利用灰色理論對(duì)衛(wèi)星鐘差進(jìn)行預(yù)測(cè);并在GPS衛(wèi)星受到干擾的條件下利用預(yù)測(cè)的鐘差值輔助GPS接收機(jī)進(jìn)行定位。
1 灰色理論的鐘差預(yù)測(cè)模型
灰色理論研究的是一種對(duì)貧信息的建模,它提供了在貧信息的情況下如何解決系統(tǒng)問(wèn)題的新途徑[6-8]。通常情況下系統(tǒng)的原始數(shù)據(jù)都不具備規(guī)則性,而可以通過(guò)利用累加生成的方法去逼近系統(tǒng),對(duì)系統(tǒng)進(jìn)行累加處理之后,生成有規(guī)律的數(shù)據(jù),從而降低數(shù)據(jù)的隨機(jī)性[9-10]。
對(duì)序列Z = [Z(1),Z(2),…,Z(L)]建立灰色模型的過(guò)程如下:
1)首先需要對(duì)系統(tǒng)原始的序列Z進(jìn)行一次累加,生成新的序列Z(1)。

2)對(duì)序列Z(1)的指數(shù)規(guī)律性進(jìn)行檢驗(yàn)。()

當(dāng)t>3時(shí),如果1<σ(t)<1.5,則新生成的序列Z(1)具有指數(shù)規(guī)律,可以對(duì)其建立灰色模型。
3)對(duì)新生成序列Z(1)建立微分方程

4)將式(3)寫(xiě)成矩陣形式

其中,

5)依據(jù)最小二乘法的方法,對(duì)a和u參數(shù)進(jìn)行估計(jì)

6)通過(guò)利用a和u的估計(jì)值~a和~u,計(jì)算新生成序列Z(1)的預(yù)測(cè)序列如式(7)所示。

7)對(duì)預(yù)測(cè)序列~Z(1)進(jìn)行一次累減操作,將得到原始序列Z的預(yù)測(cè)序列~Z如式(8)所示。

基于灰色理論的接收機(jī)鐘差預(yù)測(cè)模型,其對(duì)系統(tǒng)原始的鐘差序列不需要做出任何的統(tǒng)計(jì)規(guī)律的假設(shè)[3],故其具有廣泛的適應(yīng)性。
2 鐘差預(yù)測(cè)模型輔助定位
2.1 GPS偽距定位原理
當(dāng)GPS接收機(jī)可以觀測(cè)到N顆衛(wèi)星時(shí),則GPS的偽距方程為

式中:ρi為第i顆衛(wèi)星的偽距測(cè)量值;Ri為第i顆衛(wèi)星到用戶接收機(jī)的幾何距離;b為接收機(jī)與衛(wèi)星的鐘差;εi為系統(tǒng)的測(cè)量誤差。
將式(9)在接收機(jī)的概略坐標(biāo) (x0,y0,z0)處進(jìn)行泰勒級(jí)數(shù)展開(kāi),并且忽略掉二階以上的高次項(xiàng),得到線性化觀測(cè)方程

式中:L∈RN×1為偽距差向量;H∈RN×4為系數(shù)矩陣;X ∈R4×1包含了 GPS接收概略坐標(biāo) (x0,y0,z0)的改正數(shù)δx,δy,δz。
式(10)中含有4個(gè)未知的參數(shù),所以需要至少4顆衛(wèi)星數(shù)據(jù)才能進(jìn)行解算。當(dāng)在復(fù)雜環(huán)境的情況下,由于GPS衛(wèi)星信號(hào)受到遮擋,接收機(jī)只能接收3顆有效衛(wèi)星。此時(shí),系統(tǒng)只能提供3個(gè)觀測(cè)方程,故無(wú)法對(duì)4個(gè)未知數(shù)進(jìn)行解算,以至于GPS接收機(jī)無(wú)法正常定位。
2.2 鐘差輔助GPS接收機(jī)的定位解算
為了解決GPS接收機(jī)在只有3顆有效衛(wèi)星的條件下不能定位解算的問(wèn)題,在觀測(cè)方程中引入通過(guò)灰色理論預(yù)測(cè)得到的鐘差值,通過(guò)擴(kuò)充觀測(cè)矩陣來(lái)實(shí)現(xiàn)對(duì)GPS接收機(jī)的定位解算。
利用鐘差預(yù)測(cè)模型輔助GPS接收機(jī)定位解算時(shí),將預(yù)測(cè)的鐘差值B替代實(shí)際的鐘差值b,則系統(tǒng)方程為

式中:L′∈RN×1為擴(kuò)展后的偽距差向量;H′∈RN×3為擴(kuò)展后的系數(shù)矩陣;X′∈R3×1包含了GPS接收機(jī)概略坐標(biāo) (x0,y0,z0)的改正數(shù)δx,δy,δz。
式中:l1,m1,n1為GPS接收機(jī)與第i顆衛(wèi)星之間的方向余弦,其中

式中:(x0,y0,z0)為接收機(jī)的坐標(biāo);(Xi,Yi,Zi)為第i顆衛(wèi)星的坐標(biāo)。
由式(10)和式(11)可以看出,在引入了鐘差預(yù)測(cè)模型以后,定位解算的未知參數(shù)變成了3個(gè)。所以,利用鐘差模型輔助的方法在只有3顆衛(wèi)星的條件下,可以實(shí)現(xiàn)對(duì)GPS接收機(jī)的定位解算。圖1為鐘差輔助GPS定位解算的流程。

圖1 鐘差輔助定位解算流程
3 鐘差預(yù)測(cè)模型輔助定位實(shí)驗(yàn)驗(yàn)證
本文利用GPS接收機(jī)的實(shí)際測(cè)量所得的衛(wèi)星坐標(biāo)、衛(wèi)星偽距和GPS接收機(jī)鐘差等相關(guān)數(shù)據(jù),對(duì)鐘差預(yù)測(cè)模型輔助的GPS定位方法在靜態(tài)情況下進(jìn)行了驗(yàn)證分析。
3.1 實(shí)驗(yàn)條件
GPS接收機(jī)持續(xù)采集衛(wèi)星定位數(shù)據(jù)5 min,每1 s為一個(gè)采樣間隔,共獲得了300組定位數(shù)據(jù)。提取前4 min所采集到的鐘差數(shù)據(jù)并利用這些數(shù)據(jù)建立預(yù)測(cè)鐘差模型,然后預(yù)測(cè)第5 min鐘差,利用預(yù)測(cè)值輔助GPS接收機(jī)定位。用于建模的接收機(jī)鐘差如圖2所示。
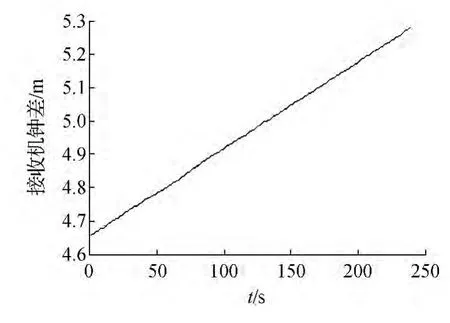
圖2 實(shí)驗(yàn)所用鐘差數(shù)據(jù)
由圖2可以看出,GPS接收機(jī)的鐘差數(shù)據(jù)較大,若直接利用這些數(shù)據(jù)建立鐘差預(yù)測(cè)模型的話可能會(huì)使得最終的運(yùn)算量過(guò)大,不利于定位解算。因此對(duì)該序列進(jìn)行一次差分運(yùn)算,然后對(duì)經(jīng)過(guò)差分運(yùn)算所得到的新的序列進(jìn)行灰色預(yù)測(cè)模型的建立。
3.2 模型預(yù)測(cè)能力分析
為了確保模型建立的合理性需要在模型建立之前對(duì)序列的指數(shù)型規(guī)律進(jìn)行一次檢驗(yàn)。圖3為序列指數(shù)規(guī)律的評(píng)價(jià)指標(biāo)σt

圖3 差分序列的指數(shù)規(guī)律
由圖3可以看出,1<σ(t)<1.5,差分序列滿足指數(shù)規(guī)律,可以對(duì)其進(jìn)行灰色模型的建立。
由圖4可知,鐘差預(yù)測(cè)的平均誤差為14.473 m,并且隨時(shí)間的增大,鐘差預(yù)測(cè)誤差的值也隨之增大。但是在241~280 s之間其預(yù)測(cè)誤差的值基本保持在一定水平?jīng)]有太大的波動(dòng),所以在較短的預(yù)測(cè)時(shí)間內(nèi),模型能夠很好地反應(yīng)出鐘差序列的變化趨勢(shì)。

圖4 鐘差預(yù)測(cè)誤差
灰色理論用指數(shù)曲線去擬合原始數(shù)據(jù),最終預(yù)測(cè)結(jié)果為一條平滑曲線。序列隨時(shí)間的增長(zhǎng)逐漸偏離指數(shù)的固有特征,這樣便使得最終的預(yù)測(cè)誤差越來(lái)越大。因此,基于灰色理論的接收機(jī)鐘差預(yù)測(cè)模型適合于短期預(yù)測(cè)。
3.3 鐘差方式輔助GPS定位解算
利用以上的鐘差預(yù)測(cè)模型輔助GPS接收機(jī)實(shí)現(xiàn)最終的定位解算,結(jié)果如圖5所示。
由圖5可知,基于鐘差預(yù)測(cè)模型對(duì)于GPS輔助定位的精度效果明顯。在241~280 s之間進(jìn)行預(yù)測(cè)時(shí),其定位的誤差最大沒(méi)有超過(guò)30 m,這個(gè)定位結(jié)果能夠滿足短時(shí)間的定位精度的要求。但是由于存在預(yù)測(cè)誤差的累計(jì),隨著時(shí)間的持續(xù)增長(zhǎng),使得定位誤差越來(lái)越大;而當(dāng)預(yù)測(cè)時(shí)間超過(guò)60 s時(shí),其定位誤差超過(guò)了80 m,此時(shí)的定位解算得出的結(jié)果誤差過(guò)大,只具有一定的參考價(jià)值。

圖5 X軸方向的定位誤差
4 結(jié)束語(yǔ)
本文提出了一種基于灰色理論的鐘差預(yù)測(cè)模型輔助GPS定位的方法實(shí)現(xiàn)GPS衛(wèi)星不完備情況下的接收機(jī)的定位解算。驗(yàn)證結(jié)果表明該模型可以輔助GPS在其不完備條件下的定位解算。此外通過(guò)鐘差方式輔助定位結(jié)果的精度與鐘差預(yù)測(cè)精度有直接的關(guān)系。如何通過(guò)提高鐘差預(yù)測(cè)的精度來(lái)進(jìn)一步提升鐘差模型輔助定位的精度是下一步需要解決的關(guān)鍵問(wèn)題。
[1] 鄭睿,陳杰.信號(hào)短暫缺失下的非完備GPS定位算法研究[J].電子科技大學(xué)學(xué)報(bào),2009,38(4):496-500.
[2] WU Y,GUO J M.Single point positioning with sequential least-squares filter and esti mated real-time stochastic model[J].Geo-Spatial Infor mation Science,2008,11(1):13-16.
[3] 丁傳炳,王良民,常思江.制導(dǎo)火箭GPS INS全組合導(dǎo)航系統(tǒng)仿真研究[J].儀器儀表學(xué)報(bào),2010,31(5):1179-1193.
[4] 何秀鳳,陳永齊,桑文剛,等.GPS偽衛(wèi)星組合定位方法及其在變形監(jiān)測(cè)中的應(yīng)用[J].南京航空航天大學(xué)學(xué)報(bào),2007,39(4):496-500.
[5] HOU Y L,LUO D.A decision model based on grey rough sets integration with inco mplete inf or mation[J].Chinese Quarterly Journal of Mathematics,2009,24(1):151-158.
[6] XIA X T,WANG Z Y.Grey relation bet ween nonlinear characteristic and dynamic uncertainty of rolling bearing friction torque[J].Chinese Journal of Mechanical Engineering,2009,22(2):244-249.
[7] YANG Q M,SUN J M.A location method for autonomous vehicle based on integrated GPS/INS[C].IEEE Inter national Conference on Vehicular Electronics and Safety,Beijing China,December 13-15,2007.
[8] PHTAK M,CHANSARKAR M,KOHLI S.Positon fix from three GPS satellites and altitude:a direct method[J].IEEE Transactions on Aerospace and Electronic System,1999,35(1):350-354.
[9] 段宇,吳江飛.基于EKF和自適應(yīng)抗差濾波的星載GPS定軌方法[J].測(cè)繪工程,2014,23(1):21-24,30.
[10]傅惠民,劉成瑞,馬小兵.時(shí)間序列均值和方差函數(shù)的確定方法[J].機(jī)械強(qiáng)度,2004,26(2):164-169.
[11]王爾申,張淑芳,胡慶.基于時(shí)鐘偏差模型的GPS不完整星座定位方法[J].大連海事大學(xué)學(xué)報(bào),2009,35(2):59-62.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19