分布式驅動電動汽車制動防抱死控制策略研究
2015-03-25 02:40:30徐國權濮龍鋒王樹榮
環境技術 2015年1期
關鍵詞:控制策略
張 汝,徐國權,濮龍鋒,王樹榮
(1. 泛亞汽車技術中心有限公司,上海 201201; 2. 蘇州廣博力學環境實驗室,蘇州 215122)
前言
電動汽車的研發與推廣應用是解決能源與環境問題的有效途徑[1]。在驅動形式上,電動汽車主要可以分為集中式和獨立式兩種結構。與集中式驅動相比較,采用獨立驅動的車輛能夠減輕質量,簡化傳動系的布置,同時還可以通過對驅動電機的獨立控制更好地發揮車輛的動力學潛能,提高行駛安全性[2]。本文針對獨立驅動電動汽車在緊急制動工況下電機力矩與液壓制動力矩的協調控制問題開展研究,所基于的硬件結構如圖1 所示。
其中,1 為車輪,2 為液壓制動輪缸,3 為常閉電磁閥,4 為液壓泵及其電機,5 為低壓儲能器,6 為高壓儲能器,7 為常開電磁閥,8 為輪缸壓力傳感器,9 為驅動電機及其減速器,10 為輪速傳感器。
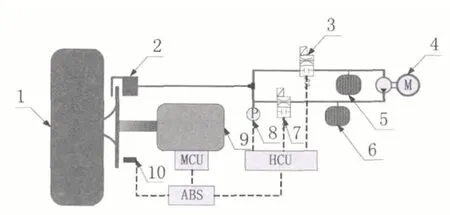
圖1 電液復合制動的硬件結構
在電動汽車進行緊急制動時,若不對再生制動加以控制,會造成再生制動力矩干擾ABS 系統正常工作,從而惡化制動效果[3]。針對緊急制動時再生制動力矩的控制問題,國內外學者展開了廣泛的研究。文獻[4]中,作者設計邏輯門限值來控制回饋制動力矩的開閉從而達到調節總制動力矩大小的目的。文獻[5]中,作者計算出防抱死制動時所應施加到車輪上的制動力,后將此制動力盡可能由再生制動力來實現,從而最大限度回收了制動能量。文獻[6]中作者提出僅利用電制動,用滑模觀測器估算摩擦力和車速,用滑模控制器控制車輪滑移率來實現ABS 控制。
本文以提高制動安全為目標,針對分布式驅動電動汽車的特點,提出一種電液復合雙路防抱死制動控制策略。所提控制策略不是以總力矩大小來約束電機力矩輸出,而是以最優滑移率為目標,獨立進行電機力矩與液壓制動力矩的控制。同時考慮到電機力矩與液壓制動力矩的差異,通過合理選擇兩者控制算法,達到充分利用電機力矩響應迅速,具有驅動、回饋制動雙向特性的優勢,彌補液壓制動力矩響應較慢的不足,提高車輪最優滑移率跟隨能力。
通過搭建半實物仿真平臺,驗證了所提雙路控制策略的有效性。
1 電液復合制動防抱死雙路控制策略
分布式驅動電動汽車在緊急制動時,為使車輪滑移率更好地跟隨最優滑移率,獨立進行電機力矩與液壓制動力矩的控制,控制流程如圖2 所示。控制器工作時,首先接收輪缸壓力傳感器信號、通信總線上電機力矩信號、輪速傳感器信號估算車輪當前滑移率。據此,液壓制動力矩控制模塊和電機力矩控制模塊根據各自控制算法計算最優輪缸壓力和電機力矩。
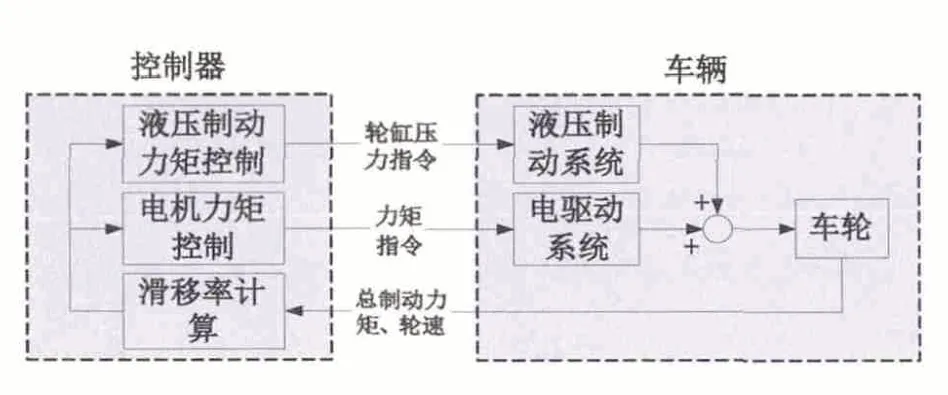
圖2 雙路控制策略結構圖
1.1 液壓制動力矩控制
由于滑模變結構控制方法具有響應快、魯棒性好的優點,本文用其進行液壓制動力矩的控制。
采用如圖3所示的單輪車輛模型進行控制器的設計,忽略空氣阻力和滾動阻力。
車輛運動方程,

式中:Fd為地面摩擦力;M 為整車質量;V 為車身速度。車輪運動方程,

式中:Thb為制動器作用到車輪上的制動力矩;Rr為車輪滾動半徑;J 為車輪繞y 軸轉動慣量;Vω為車輪轉速。
其中,

式中:μ 為路面摩擦系數;FN為車輪所受垂向載荷。
計算滑移率:

考慮到可實施性,選擇一階線性滑移線,用車輪滑移率作為狀態變量,


圖3 汽車單輪模型
式中:C 為加權系數;λ0為最優滑移率;g 為重力加速度。
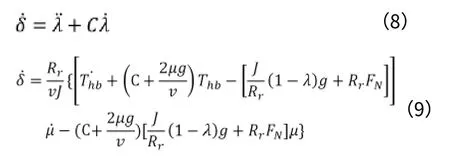
引入等速趨近率,

則有,
1.2 電機力矩控制
與液壓制動力矩相比,電機力矩響應迅速、具有雙向特性且力矩大小精確可調,因此基于所推導電機力矩與車輪滑移率傳遞函數關系進行力矩控制。在1.1 節中單輪模型基礎上變換車輪運動方程為,

式中:Fmb為電機力矩等效作用到輪胎與地面接觸點上輪胎所受的力;Mω為車輪等效質量。
輪胎所受地面力的變化量△Fd與摩擦系數變化量△μ 有如下關系,

引入μ-λ 曲線的斜率為k,

因此,在控制器采樣點記車速為V0,輪速為Vω0,

由此可以得到由制動力到Fmb到滑移率λ 的傳遞函數G(s)為,

其中,

1.3 車速估計
可由制動器輪缸壓力得到車輪所受液壓制動力矩Thb,

圖5 高附著系數路面防抱死制動仿真結果

圖6 低附著系數路面防抱死制動仿真結果

式中:P 為輪缸壓力;Kb為制動因數;Rp為制動盤半徑。
電機力矩Tmb可以由讀取電機控制器信息獲得。因此,

2 仿真驗證
雙電機獨立前驅動電動汽車直線緊急制動工況的半實物仿真分為高附著系數路面(附著系數為0.9)和低附著系數路面(附著系數為0.3)兩種,并假設最大利用附著系數出現在滑移率為0.2 時。仿真時,電動汽車以80km/h 初速度進行緊急制動,忽略駕駛員踩下制動踏板的延遲。
仿真結果表明在緊急制動工況,雙路控制策略控制下的車輛制動距離和制動時間都有了較大幅度減小。
當采用將電機力矩與液壓制動力矩作為整體進行控制時,電機力矩與液壓力矩同時增大或者減小,如圖6中c、d,這樣難以利用電機力矩響應較快的優勢,導致力矩調節周期較長,整體控制下最優滑移率追蹤能力較差。當采用雙路控制策略時,電機力矩與液壓制動力矩相互獨立控制,各自根據控制算法進行力矩調節,特別是電機可以發出驅動力矩快速降低滑移率,提高了力矩響應靈敏性,雙路控制下最優滑移率追蹤效果較好。
但雙路控制下,會出現液壓制動系統工作時電機產生驅動力矩,這會增大制動盤和制動鉗磨損。
3 結論
1)建立了分布式驅動電動汽車緊急制動時的電液復合制動雙路防抱死控制策略,有效管理了緊急制動時電機的力矩,縮短了緊急制動時的制動距離與制動時間。
2)根據液壓制動系統的特點,選擇滑模變結構控制方法進行液壓制動力矩的控制,提高了力矩響應速度;依據電機力矩與車輪滑移率傳遞關系進行電機力矩控制,充分利用電機力矩響應較快、具有驅動/制動雙向性的優勢,提高了最優滑移率追蹤能力。
3)電機力矩的加入提高了車輛緊急制動性能,制動過程中電機產生驅動力矩會增大制動盤和制動鉗磨損。
[1]Ehsani Mehrdad, Gao Yimin, Emadi Ali. Modern electric, hybrid electric, and fuel cell vehicles fundamentals, theory, and design[M]. Boca Raton, America: CRC Press, Taylor & Francis Group,2009: 25-26.
[2]解少博.雙電機獨立驅動汽車協調制動控制關鍵問題研究[D].北京:北京理工大學.2011.
[3]陸欣.燃料電池城市客車制動能量回饋系統協調控制[D].北京:清華大學, 2009.
[4]初亮,呂廷秀,張永生 等.混合動力轎車再生制動與防抱死集成控制系統[P].中國專利:CN200710055687.9, 2007-05-21.
[5]藤滋,松浦正裕,小九保浩一 等.車輛制動控制設備[P].中國專利:CN200610084162.3, 2006-08-24.
[6]Hsiao, Min-Hung. Antilock Braking Control of Electric Vehicles with Electric Brake[C]. SAE. Paper Number: 2005-01-1581,2005-04-11.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36