一種海底淺層聲學(xué)探測(cè)數(shù)據(jù)綜合可視化方法
2015-03-22 02:36:04劉加銀劉海行蘇天赟李新放
海洋通報(bào) 2015年3期
關(guān)鍵詞:可視化
劉加銀,劉海行,蘇天赟,李新放
(國(guó)家海洋局第一海洋研究所,山東 青島 266061)
目前的海底探測(cè)主要依賴于聲學(xué)探測(cè)技術(shù),包括多波束測(cè)深、側(cè)掃聲吶影像和淺地層剖面探測(cè),其工作原理基本相似,只是探測(cè)目標(biāo)的不同而有所區(qū)別(金翔龍,2007)。
多波束聲吶系統(tǒng)以獲得高密度、高精度的位置信息為主,覆蓋廣,但成像質(zhì)量不高,主要用于描繪海底地形地貌;側(cè)掃聲吶以成像為主,能直觀的反映海底地貌形態(tài)、沉積物類型等信息(陽(yáng)凡林,2003);淺地層剖面勘測(cè)是一種基于水聲學(xué)原理的連續(xù)走航式探測(cè)水下淺部地層和構(gòu)造的地球物理方法,可以有效獲得海底以下的淺部地層結(jié)構(gòu)和構(gòu)造,并分析出海底以下存在的災(zāi)害地質(zhì)因素如埋藏古河道、淺層氣、淺部斷層、軟弱地層和淺部基巖等(李平等,2011)。綜合利用多波束測(cè)深數(shù)據(jù)、側(cè)掃聲吶數(shù)據(jù)和淺地層剖面探測(cè)數(shù)據(jù),對(duì)海底地形地貌的認(rèn)知、水下目標(biāo)的探測(cè)、海底地質(zhì)結(jié)構(gòu)的鑒別和分類等都具有重要意義(趙建虎,2002)。然而,由于數(shù)據(jù)獲取方式和數(shù)據(jù)格式的不同,多波束測(cè)深數(shù)據(jù)、側(cè)掃聲吶影像和淺地層剖面的數(shù)據(jù)集相互獨(dú)立,這給海底地形地貌特征和地層結(jié)構(gòu)的識(shí)別帶來(lái)了困難。數(shù)據(jù)綜合可視化是解釋和理解海底淺層聲學(xué)探測(cè)數(shù)據(jù)的有效手段。
為實(shí)現(xiàn)多波束數(shù)據(jù)和側(cè)掃聲吶影像的綜合利用,陽(yáng)凡林(2003) 對(duì)多波束和側(cè)掃聲吶數(shù)據(jù)的融合進(jìn)行了論述,提出基于等深線和輪廓線的同名特征點(diǎn)對(duì)不同圖像源進(jìn)行匹配,然后對(duì)匹配后的數(shù)字信息使用小波變換進(jìn)行融合可視化。趙建虎等(2013) 提出了ISURF 多波束圖像和側(cè)掃聲吶圖像改進(jìn)匹配算法,以及適合二者融合的拉普拉斯金字塔法和小波變換法;利用該方法可以獲得具有高精度位置信息和高質(zhì)量圖像信息的海床地貌影像。基于二維空間的數(shù)據(jù)融合可視化方法雖然能獲得較高的精度,但并不能較全面的反映海底地質(zhì)環(huán)境,也不能進(jìn)行交互操作,在具體應(yīng)用中給信息的進(jìn)一步提取帶來(lái)了困難。
姜小俊(2009) 提出了SFBAO 模型對(duì)淺地層剖面和側(cè)掃聲吶、多波束數(shù)據(jù)融合后進(jìn)行GIS 表達(dá)。該模型將淺剖數(shù)據(jù)作為航跡線的一個(gè)屬性,然后將航跡線與側(cè)掃聲吶或多波束數(shù)據(jù)基于統(tǒng)一的空間參考系進(jìn)行融合可視化。SFBAO 模型實(shí)質(zhì)上是以數(shù)據(jù)庫(kù)的方式綜合管理海量的多波束數(shù)據(jù)、側(cè)掃聲吶影像和淺剖數(shù)據(jù),并且在此基礎(chǔ)上添加可視化模塊。由于側(cè)掃聲吶影像、多波束和側(cè)掃淺剖數(shù)據(jù)并沒(méi)有在同一視圖下顯示,在相對(duì)較小尺度的空間,該方法對(duì)海底地質(zhì)三維環(huán)境顯示不夠直觀。陳超等(2012) 提出利用多重紋理對(duì)海底地形與海底底質(zhì)分類紋理進(jìn)行三維可視化。然而側(cè)掃聲吶影像比海底地質(zhì)分類紋理數(shù)據(jù)大很多,具體的實(shí)現(xiàn)又對(duì)紋理尺寸做出了比較嚴(yán)格的限制(Segal et al,2012)。此外,側(cè)掃聲吶影像分辨率較高,多波束數(shù)據(jù)分辨率較低,使用多重紋理時(shí)對(duì)地形三角網(wǎng)頂點(diǎn)指定紋理坐標(biāo)容易出現(xiàn)錯(cuò)誤。
側(cè)掃聲吶影像的分辨率很高,在局部范圍內(nèi)數(shù)據(jù)量也非常大,一些經(jīng)典工具往往通過(guò)金字塔模型或者紋理切片的方式處理這樣超大的紋理數(shù)據(jù),如ArcGIS 和OSGEarth。然而,金字塔或者紋理切片的方式處理繁瑣,并且在實(shí)際應(yīng)用中需要反復(fù)進(jìn)行紋理數(shù)據(jù)切換,此時(shí)經(jīng)典方法效率不高,影響視覺(jué)效果的流暢性。
海洋信息可視化時(shí),需要注意體現(xiàn)科學(xué)數(shù)據(jù)的可視化和滿足視覺(jué)感受的可視化的統(tǒng)一,它們的區(qū)別在于是否可以從可視化結(jié)果中讀取數(shù)值(蘇奮振等,2014)。現(xiàn)有工具難以滿足在對(duì)海底淺層聲學(xué)探測(cè)數(shù)據(jù)三維綜合可視化的同時(shí),進(jìn)行海底地質(zhì)環(huán)境信息的提取。
為更加全面、直觀、高效地反映海底地質(zhì)環(huán)境和方便進(jìn)行信息提取,本文提出了一種基于OpenGL 可編程管線的海底淺層聲學(xué)探測(cè)數(shù)據(jù)三維可視化方法,并利用南海海底某峽谷區(qū)域獲得的高分辨率多波束測(cè)深數(shù)據(jù)、側(cè)掃聲吶影像和淺地層剖面數(shù)據(jù)對(duì)該方法進(jìn)行實(shí)現(xiàn)和應(yīng)用。
1 GPU 原理
目前的OpenGL 可編程管線包括頂點(diǎn)處理器(Vertex Processor)、細(xì)分控制處理器(Tessellation Control Processor)、細(xì)分計(jì)算處理器(Tessellation Evaluation Processor)、幾何處理器(Geometry Processor)、片元處理器(Fragment Processor) 和計(jì)算處理器(Compute Processor)。頂點(diǎn)處理器一次只能操作一個(gè)頂點(diǎn),主要用于對(duì)圖元頂點(diǎn)位置變換和顏色設(shè)置;細(xì)分控制處理器和細(xì)分計(jì)算處理器可以在GPU 中對(duì)模型對(duì)象進(jìn)行細(xì)化,提升圖像的渲染質(zhì)量;幾何處理器可以對(duì)整個(gè)圖元進(jìn)行處理,計(jì)算法線和改變?cè)嫉耐負(fù)浣Y(jié)構(gòu),如將三角形轉(zhuǎn)變成點(diǎn);片元處理器是著色器的最后一個(gè)階段,最終的像素顏色由它來(lái)設(shè)置;計(jì)算處理器比較特殊,它并不是圖像繪制管線的一部分,但是卻可以對(duì)圖像和存儲(chǔ)緩沖區(qū)等OpenGL 對(duì)象中的數(shù)據(jù)進(jìn)行改變(Kessenich et al,2012)。
處于效率的考慮,OpenGL 提供了緩沖區(qū)對(duì)象用于在顯卡中存儲(chǔ)頻繁使用的數(shù)據(jù)。頂點(diǎn)緩沖區(qū)對(duì)象適合存儲(chǔ)頂點(diǎn)數(shù)據(jù),一致緩沖區(qū)對(duì)象以Group 的形式存放uniform 變量,紋理緩沖區(qū)對(duì)象則可以存儲(chǔ)比一維紋理大幾萬(wàn)倍的數(shù)據(jù)(付飛 等,2012)。幀緩沖區(qū)對(duì)象封裝了幀緩沖區(qū)的狀態(tài),如像素的顏色值、深度值、模板值等。OpenGL 提供了機(jī)制,能夠?qū)彌_區(qū)的狀態(tài)渲染到紋理,從而可以在內(nèi)存中獲得這些狀態(tài)值,實(shí)現(xiàn)內(nèi)存與幀緩沖區(qū)的交互。
2 繪制流程
根據(jù)海底淺層環(huán)境建模的需求,本文采用的繪制流程如圖1 所示。在內(nèi)存中對(duì)多波束數(shù)據(jù)進(jìn)行三角化處理,生成地形三角網(wǎng)后和淺剖數(shù)據(jù)進(jìn)行求交運(yùn)算,得到淺剖數(shù)據(jù)的實(shí)際深度值。將側(cè)掃聲吶影像數(shù)據(jù)轉(zhuǎn)換成色度盤的形式也在內(nèi)存中完成,并且詳細(xì)記錄側(cè)掃聲吶影像的坐標(biāo),大小等信息。經(jīng)內(nèi)存處理后的數(shù)據(jù)通過(guò)總線傳輸?shù)斤@卡進(jìn)行可視化處理:頂點(diǎn)處理器完成光照計(jì)算和顏色設(shè)置;側(cè)掃聲吶影像數(shù)據(jù)和多波束數(shù)據(jù)的三維綜合顯示在片元處理器中完成。通過(guò)OpenGL 提供的接口讀取像素的深度值反算出屏幕像素點(diǎn)對(duì)應(yīng)的實(shí)際坐標(biāo),而計(jì)算出的實(shí)際坐標(biāo)可以用來(lái)提取地形剖面線和淺地層剖面的相關(guān)信息。
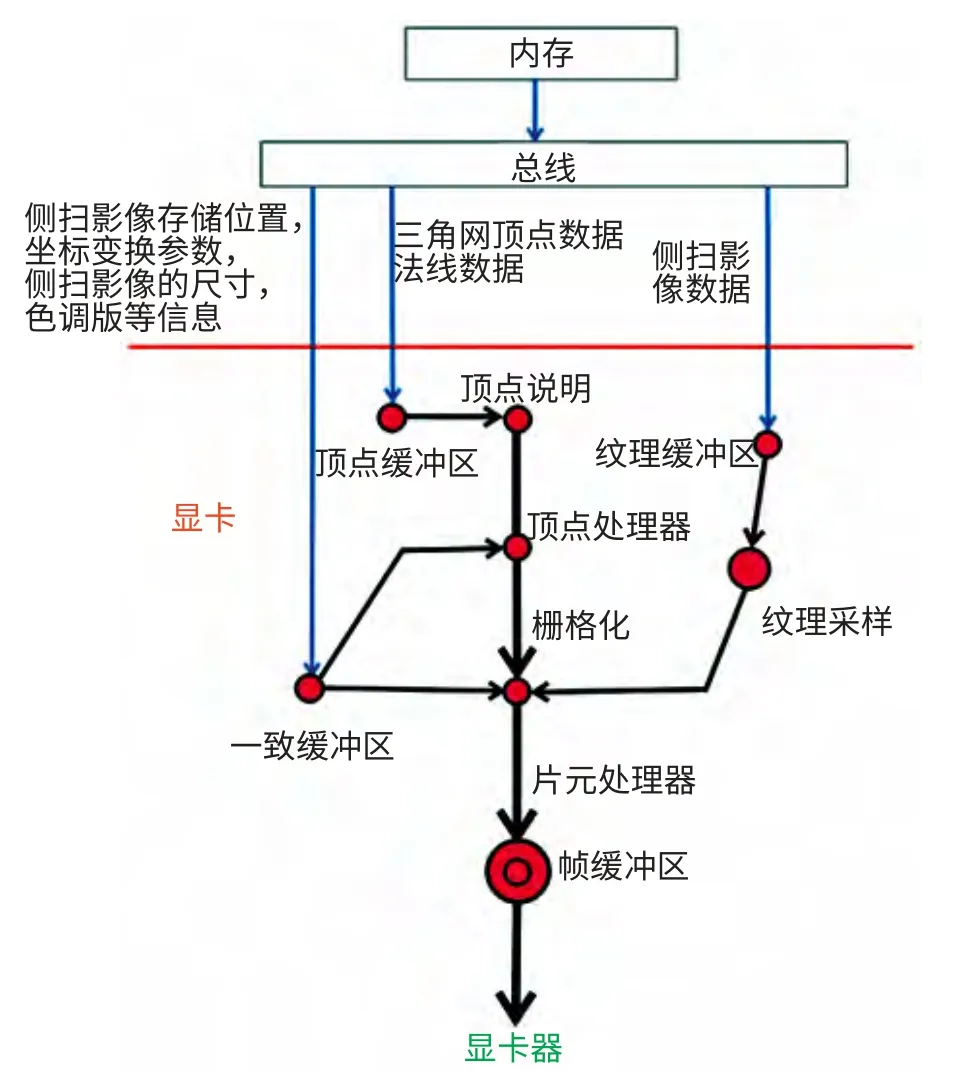
圖1 本文采用的繪制管線
3 算法描述
3.1 海底地形可視化
海底地形可視化首先需要根據(jù)點(diǎn)云數(shù)據(jù)生成DTM,為增強(qiáng)三維效果,還需要設(shè)置顏色、通過(guò)法線計(jì)算光照。多波束測(cè)深點(diǎn)云數(shù)據(jù)重構(gòu)海底地形已經(jīng)有許多相關(guān)的探討和成熟的工具(Joseph,1998;武強(qiáng)等,2011;Zhang et al,2012),一些開源代碼也可以用來(lái)生成每個(gè)頂點(diǎn)的法線(Wang et al,2012;VTK 6.2.0,2014;PCL 2014)。
對(duì)海底地形顏色和光照的設(shè)置在頂點(diǎn)處理器中完成。先根據(jù)地形的高程分布設(shè)置多個(gè)邊界值height [i],每個(gè)邊界值分別對(duì)應(yīng)一種顏色color [i]。設(shè)頂點(diǎn)的高程值為z,且,則該點(diǎn)的顏色通過(guò)公式(1) 進(jìn)行插值得到。

本文采用Phong 模型對(duì)海底地形進(jìn)行光照渲染,公式如(2) 所示。

式中:La、Ld、Ls分別為環(huán)境光、漫反射光和鏡面反射光的強(qiáng)度,Ka、Kd、Ks對(duì)應(yīng)地形表面環(huán)境光反射率、漫反射光反射率和鏡面光反射率,s 為光源方向向量,n 為頂點(diǎn)法線向量,r 為反射光的方向向量,v 為視點(diǎn)方向向量,參數(shù)f 可以根據(jù)需要進(jìn)行調(diào)節(jié)(Wolf,2011)。
地形剖面可以直觀地對(duì)目標(biāo)路徑的地形變化情況進(jìn)行表達(dá)。交互操作時(shí),在屏幕上指定一條線段,結(jié)合模型視點(diǎn)投影矩陣和像素點(diǎn)的位置以及深度值得到線段端點(diǎn)對(duì)應(yīng)的空間三維坐標(biāo);然后將指定線段進(jìn)行細(xì)分,得到一系列(x,y) 坐標(biāo)對(duì),每個(gè)坐標(biāo)對(duì)可以生成一條端點(diǎn)坐標(biāo)為(x,y,10 000)、(x,y,-10 000) 的線段,通過(guò)該線段和地形三角網(wǎng)求交可以得到坐標(biāo)對(duì)的深度值。
3.2 側(cè)掃聲吶影像與多波束數(shù)據(jù)綜合顯示
側(cè)掃聲吶影像和多波束測(cè)深數(shù)據(jù)綜合顯示是通過(guò)將側(cè)掃聲吶影像作為紋理添加到多波束測(cè)深數(shù)據(jù)所構(gòu)建的三角網(wǎng)上實(shí)現(xiàn)的。側(cè)掃聲吶影像數(shù)據(jù)經(jīng)過(guò)了領(lǐng)域?qū)<业南嚓P(guān)處理,具有可靠的位置信息,但此時(shí)側(cè)掃聲吶影像還只是二維數(shù)據(jù),與多波束數(shù)據(jù)相比,具有分辨率高、數(shù)據(jù)量大等特點(diǎn)。側(cè)掃聲吶影像之間的格式并不一致,有jpg 和Geotif 兩種格式,jpg 格式的影像只有四個(gè)角點(diǎn)的坐標(biāo),對(duì)應(yīng)的區(qū)域不規(guī)則;側(cè)掃聲吶影像對(duì)應(yīng)的地形區(qū)域之間也有重疊。傳統(tǒng)的空間數(shù)據(jù)處理軟件難以將兩種數(shù)據(jù)進(jìn)行鑲嵌匹配和綜合顯示。
3.2.1 側(cè)掃聲吶影像數(shù)據(jù)存儲(chǔ)
側(cè)掃聲吶影像的分辨率很高,在局部范圍內(nèi)數(shù)據(jù)量非常大,尺寸也不統(tǒng)一。通常情況下OpenGL要求紋理對(duì)象(TO) 的大小是2 的n 次冪,并且對(duì)TO 的大小作出了限制;而紋理緩沖區(qū)對(duì)象(TBO)的限制卻十分寬松。如,在本文所使用的編程環(huán)境中,TO 的最大值為16 384 Byte,一張大小為3 950×9 500 的側(cè)掃聲吶影像即使只用1 Byte 記錄每個(gè)像素的灰度值,也至少需要分割成2 291 份紋理瓦片,同時(shí)需要保證每張圖像的尺寸為2 的n 次冪;而TBO 的最大值為134 217 728 Byte,可以一次存儲(chǔ)3 張以上這樣的側(cè)掃聲吶影像,避免實(shí)際應(yīng)用中反復(fù)切換紋理數(shù)據(jù)帶來(lái)的延遲問(wèn)題,且不必將紋理的尺寸處理成2 的n 次冪。
側(cè)掃聲吶影像數(shù)據(jù)在CPU 中處理后,得到影像的色度盤,像素的顏色索引值存儲(chǔ)在TBO 中,這樣對(duì)于RGB 格式的圖像可以節(jié)省大約2/3 的顯存空間。單個(gè)TBO 存儲(chǔ)空間有限,無(wú)法容納所有的側(cè)掃聲吶影像數(shù)據(jù),因此要將側(cè)掃聲吶影像進(jìn)行分組和切割,分別存進(jìn)多個(gè)TBO 中。為在片元處理器中獲得正確的側(cè)掃聲吶影像數(shù)據(jù),需要計(jì)算每個(gè)TBO 覆蓋的范圍、單張影像的覆蓋范圍、在紋理緩沖區(qū)的位置、側(cè)掃聲吶影像的尺寸等信息;由于相關(guān)信息的數(shù)量較多,超出了著色器對(duì)uniform變量個(gè)數(shù)的限制,所以將它們和色度盤組織在一起存儲(chǔ)到UBO 中。這些數(shù)據(jù)只會(huì)通過(guò)總線(Bus) 往GPU 傳輸一次,因此減輕了帶寬的限制。
3.2.2 紋理映射
傳統(tǒng)的紋理貼圖方法需要為三角網(wǎng)的每個(gè)頂點(diǎn)指定紋理坐標(biāo),該過(guò)程不僅耗時(shí),并且在側(cè)掃聲吶影像和地形數(shù)據(jù)分辨率不一致的情況下,會(huì)出現(xiàn)圖2 所示的情況。其中,三角形ACD、ABC 代表多波束數(shù)據(jù)生成的三角網(wǎng),紅色網(wǎng)格代表側(cè)掃聲吶影像,黑色虛線代表屏幕上的像素。由于側(cè)掃聲吶影像數(shù)據(jù)的分辨率比多波束數(shù)據(jù)的分辨率高很多,所以三角形ACD、ABC 只有部分頂點(diǎn)被側(cè)掃聲吶影像覆蓋。傳統(tǒng)方法只指定三角形的各個(gè)頂點(diǎn)的紋理坐標(biāo),三角形區(qū)域內(nèi)的紋理坐標(biāo)通過(guò)這三個(gè)點(diǎn)自動(dòng)插值得到,然后固定管線依據(jù)紋理坐標(biāo)進(jìn)行紋理貼圖。如果給C、D 點(diǎn)指定紋理坐標(biāo),那么四邊形CDFE 覆蓋范圍內(nèi)的像素點(diǎn)P1 會(huì)獲得不該有的紋理,三角形AFE 覆蓋區(qū)域內(nèi)的像素點(diǎn)P2 的紋理值也會(huì)出現(xiàn)錯(cuò)誤。若不給CD 指定紋理坐標(biāo),那么AFE 區(qū)域內(nèi)的像素就會(huì)丟失紋理。通過(guò)細(xì)化三角形ACD 然后再指定紋理坐標(biāo)的方法效率較低。
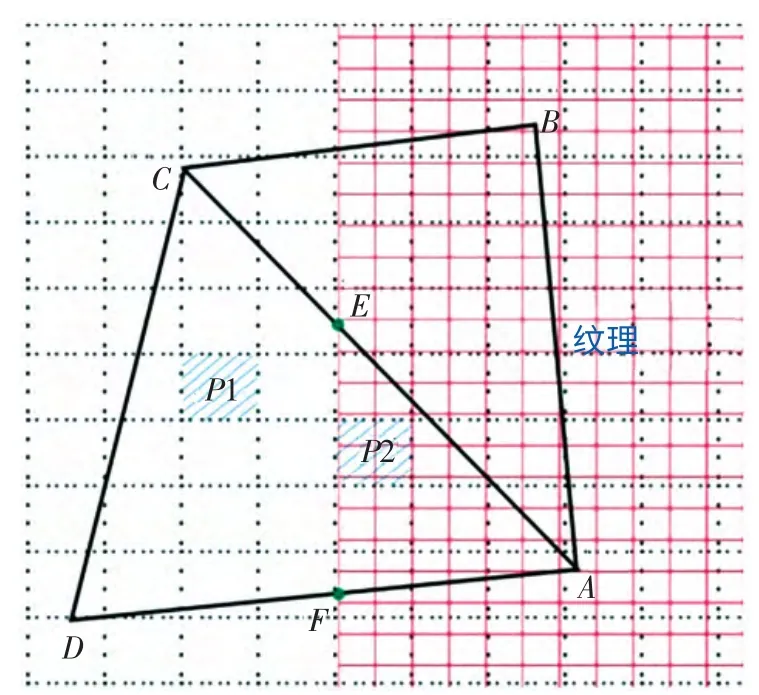
圖2 分辨率不一致的紋理貼圖
本文提出根據(jù)像素對(duì)應(yīng)的實(shí)際坐標(biāo)值求取紋理坐標(biāo)的方法。在頂點(diǎn)著色器中設(shè)置一個(gè)傳出變量作為頂點(diǎn)的屬性,并將該變量初始化為三角網(wǎng)頂點(diǎn)的坐標(biāo)值;經(jīng)過(guò)圖1 的柵格化階段時(shí),該變量會(huì)自動(dòng)進(jìn)行插值,片元處理器中獲得的就是每個(gè)像素對(duì)應(yīng)的三維空間坐標(biāo)。在進(jìn)行紋理貼圖時(shí),首先判斷該像素是否被紋理覆蓋,然后才從紋理緩沖區(qū)中獲取正確的灰度值進(jìn)行疊加。在小比例尺顯示時(shí),每個(gè)像素對(duì)應(yīng)的是一塊相對(duì)較大的區(qū)域,覆蓋該區(qū)域的可能是側(cè)掃聲吶影像的多個(gè)灰度值,本文的方法只取其中一個(gè)代表整個(gè)區(qū)域。由于海底地質(zhì)環(huán)境的連續(xù)性,該方法不會(huì)對(duì)宏觀效果產(chǎn)生影響。在大比例尺顯示時(shí),屏幕上每個(gè)像素能夠?qū)?yīng)側(cè)掃聲吶影像的一個(gè)像素,所以并不影響側(cè)掃聲吶影像的分辨率。算法流程如圖3 所示。
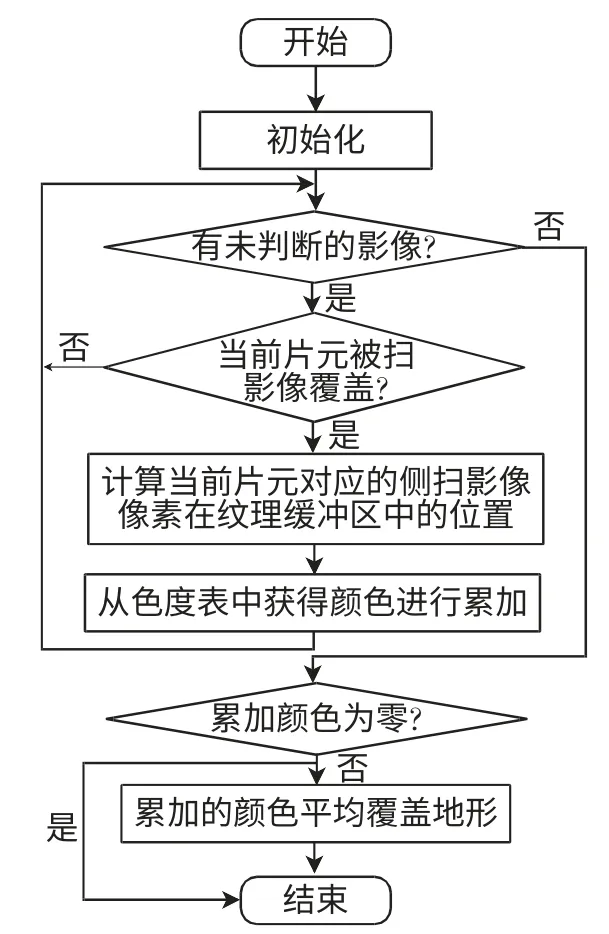
圖3 紋理貼圖過(guò)程
其中初始化階段包括側(cè)掃聲吶影像灰度數(shù)據(jù)及坐標(biāo)信息的加載,記錄當(dāng)前片元覆蓋影像張數(shù)的變量和累加顏色清零等。側(cè)掃聲吶影像數(shù)據(jù)具有Qmips、.SDF、.JSF、.XTF 等多種格式。在實(shí)際應(yīng)用中,通常是將原始的側(cè)掃聲吶數(shù)據(jù)轉(zhuǎn)換成通用的tif、Geotiff 或JPG 格式(韓春花 等,2011)。計(jì)算側(cè)掃聲吶影像和片元的對(duì)應(yīng)關(guān)系時(shí),因側(cè)掃聲吶影像的格式不同而有所區(qū)別。本文針對(duì)JPG 格式和Geotiff 格式的數(shù)據(jù)進(jìn)行闡述。
(1) Geotiff 圖像
Geotiff 是TIFF 格式的一種擴(kuò)展,在TIFF 的基礎(chǔ)上定義了一些GeoTag 來(lái)對(duì)各種坐標(biāo)系統(tǒng)、橢球基準(zhǔn)、投影信息等進(jìn)行定義和存儲(chǔ)(Ritter,2000)。本文利用GDAL 對(duì)Geotiff 進(jìn)行處理。GDAL 使用抽象數(shù)據(jù)模型來(lái)解析它所支持的數(shù)據(jù)格式,抽象數(shù)據(jù)模型包括數(shù)據(jù)集、坐標(biāo)系統(tǒng)、仿射地理坐標(biāo)變換、大地控制點(diǎn)、元數(shù)據(jù)、圖像結(jié)構(gòu)域、柵格波段和顏色表等(GDAL,2014)。其中仿射變換包含6 個(gè)參數(shù),可以通過(guò)GDAL 接口GDALDataset::GetGeoTransform(GT [6]) 獲取。在朝北方向的圖像中,GT [2] 和GT [4] 的值為0,(GT [0],GT[3]) 表示圖像左上角的橫縱坐標(biāo)值,GT [1] 表示像元寬度,GT [5] 表示像元高度。圖像行列號(hào)和地理空間之間的變換關(guān)系如下:
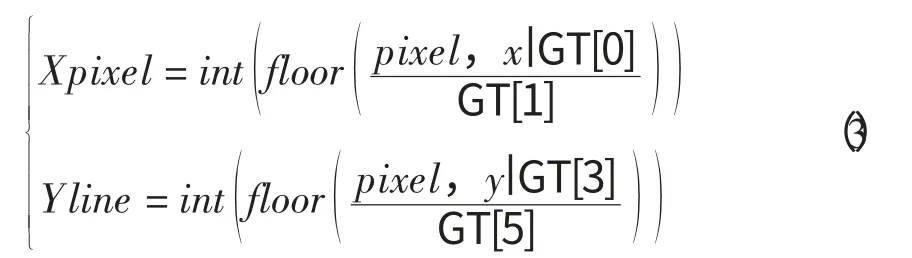
其中Yline、Xpixel 表示片元在它所在側(cè)掃聲吶影像中的行列號(hào),由于處理的是正北朝向的圖像,所以很容易判斷當(dāng)前片元是否被側(cè)掃聲吶影像覆蓋,被覆蓋片元對(duì)應(yīng)的側(cè)掃聲吶影像像素計(jì)算公式為:

式中:floor 為向下取整函數(shù),texelBufferSampler 對(duì)應(yīng)OpenGL 的紋理緩沖區(qū)對(duì)象,texelFetch 為紋理獲取函數(shù),xsize和offset 分別對(duì)應(yīng)圖像的寬度和在紋理緩沖區(qū)中的起始位置。紋理緩沖區(qū)中只存儲(chǔ)了顏色的索引值,colArray 是UBO 中存儲(chǔ)真實(shí)顏色的色度表。Pixel.x 和pixel.y 分別代表當(dāng)前像素對(duì)應(yīng)的實(shí)際地理坐標(biāo)。
(2) JPG 圖像
JPG 圖像只提供了四個(gè)角點(diǎn)坐標(biāo),如圖4 所示:ABCD 4 個(gè)頂點(diǎn)坐標(biāo)及其紋理映射關(guān)系已知。首先將圖像對(duì)應(yīng)的區(qū)域分為兩個(gè)三角形,以三角形ABC 為例,獲得任意像素P 的實(shí)際坐標(biāo)后,可得到如下3 個(gè)變量:
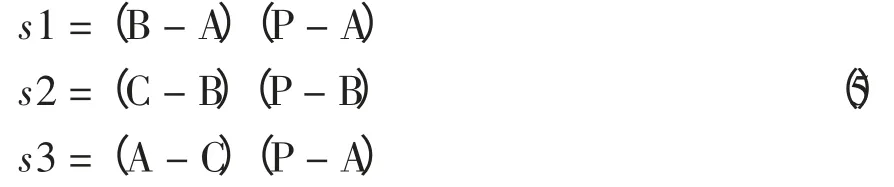
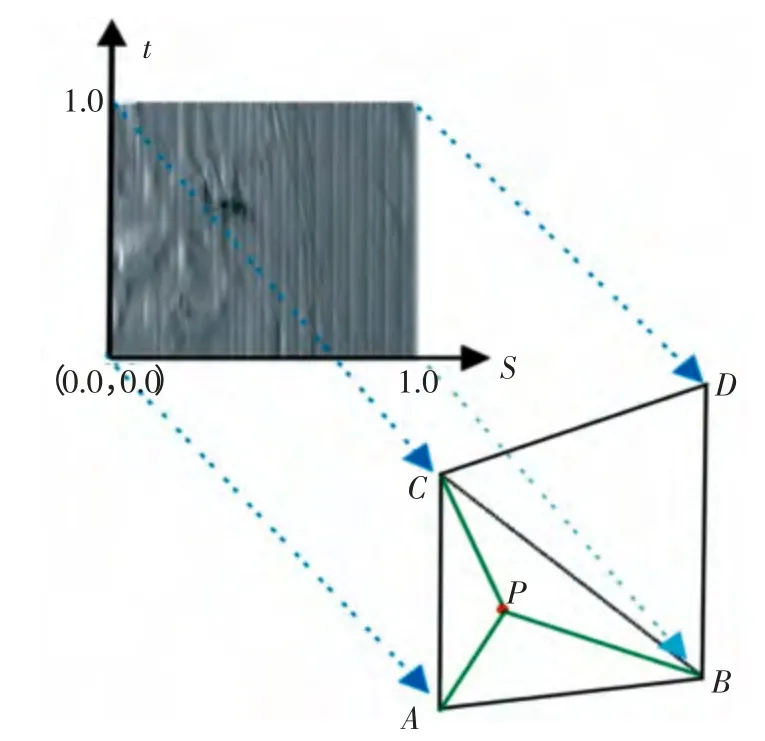
圖4 紋理空間和坐標(biāo)空間之間的映射
式中:大寫字符代表該點(diǎn)對(duì)應(yīng)的三維坐標(biāo)。若s1,s2,s3 的第3 個(gè)分量均不小于零,則當(dāng)前像素被側(cè)掃聲吶影像覆蓋。該像元的紋理坐標(biāo)需要通過(guò)插值計(jì)算獲得,計(jì)算公式如(6) 所示。
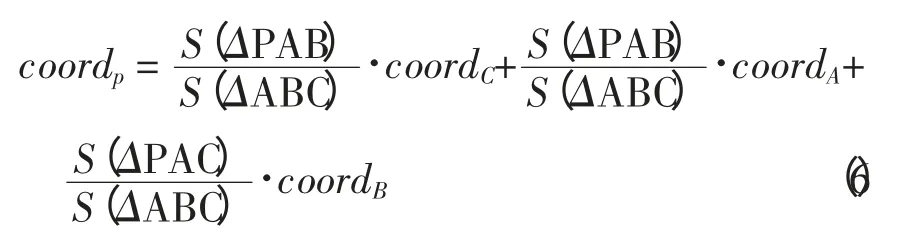
式中:coordA、coordB、coordc為三角形ABC 頂點(diǎn)的紋理坐標(biāo)值,本例中分別為(0.0,0.0),(1.0,0.0),(0.0,1.0);S(△PBC) 為三角形PBC 的面積,依此類推。落入BC 邊的點(diǎn)只在B、C 兩點(diǎn)之間插值即可。最終灰度值索引在紋理緩沖區(qū)中的位置為:

其中,offset 為覆蓋側(cè)掃聲吶影像在紋理緩沖區(qū)中的起始位置,height,width 為影像的高度和寬度,Px、Py分別為點(diǎn)P 紋理坐標(biāo)的橫坐標(biāo)值和縱坐標(biāo)值。
3.3 淺地層剖面數(shù)據(jù)可視化
原始的淺地層剖面圖像內(nèi)容包括干擾圖像、多次反射圖像、地層界面線、地層層位圖像等。這些圖像顯示具有一定灰度的點(diǎn)狀、線狀和面狀圖形,不具有整體的地理方位性和可量測(cè)性,一般將淺地層剖面數(shù)據(jù)作為航跡線的一個(gè)屬性和其他聲學(xué)探測(cè)數(shù)據(jù)進(jìn)行集成(姜小俊,2009)。原始淺地層剖面圖像經(jīng)過(guò)領(lǐng)域?qū)<业牡刭|(zhì)解釋之后,得到一系列解釋剖面點(diǎn),格式為(x,y,id,layer1,layer2,layer3,layer4….),其中x,y 為測(cè)點(diǎn)的地理坐標(biāo),id 為該點(diǎn)的編號(hào),layer1 代表第一層地層界面和海底地形之間的厚度,layer2 代表第二層地層和第一層地層之間的厚度,依此類推;缺失的地層用無(wú)效值標(biāo)記。進(jìn)行綜合可視化處理時(shí),首先作經(jīng)過(guò)淺剖測(cè)點(diǎn)的直線和地形求交得到該測(cè)點(diǎn)對(duì)應(yīng)的地形坐標(biāo),然后和各層厚度累加得到各層界面的實(shí)際坐標(biāo)值。
轉(zhuǎn)換后的數(shù)據(jù)按測(cè)線對(duì)地層進(jìn)行分層渲染得到柵狀圖,把同一層的離散頂點(diǎn)進(jìn)行三角化處理得到層面圖,通過(guò)似三棱柱三維數(shù)據(jù)建模方法(武強(qiáng)等,2011) 可以得到體模型。
4 實(shí)例分析
本文提出的方法在南海海底峽谷區(qū)域的海底地質(zhì)環(huán)境綜合顯示和分析中進(jìn)行了應(yīng)用,數(shù)據(jù)來(lái)源于國(guó)家海洋局第一海洋研究所2011年的海洋調(diào)查成果。其中多波束測(cè)深系統(tǒng)的分辨率為20 m,采用EM302 多波束測(cè)深系統(tǒng)收集;淺地層剖面數(shù)據(jù)通過(guò)全海洋淺地層剖面儀(Topographic Parametric Sonar,TOPAS) 探測(cè)獲得,使用的脈沖信號(hào)頻率為3.3 kHz;側(cè)掃聲吶影像使用無(wú)纜水下機(jī)器人(AUV) 獲取。數(shù)據(jù)覆蓋區(qū)域的面積為214.15 km2,多波束測(cè)深數(shù)據(jù)生成的DTM 由372 687 個(gè)三角形組成,側(cè)掃聲吶影像580M,淺地層剖面處理后形成的測(cè)點(diǎn)7 萬(wàn)多個(gè)。在配置GTX650Ti 顯卡的機(jī)器上,基于vc++和OSG 實(shí)現(xiàn)了系統(tǒng)原型。圖5 為實(shí)驗(yàn)數(shù)據(jù)的綜合顯示效果,在實(shí)現(xiàn)海底淺層聲學(xué)數(shù)據(jù)綜合可視化的同時(shí),可以提取地形剖面和淺地層剖面數(shù)據(jù)。圖中藍(lán)色矩形內(nèi)的粗線為拉選航跡線的高亮顯示,右上角小窗口為該航跡線對(duì)應(yīng)的淺地層剖面數(shù)據(jù)和地形數(shù)據(jù)提取結(jié)果的可視化界面,通過(guò)拉選可以實(shí)現(xiàn)海底淺層數(shù)據(jù)的查詢和提取。圖6為地形和側(cè)掃聲吶影像的貼圖效果,從圖6(b)可以看出,大比例尺環(huán)境下,側(cè)掃聲吶影像可以很好的與地形進(jìn)行匹配顯示,分辨率幾乎與原始影像一致。
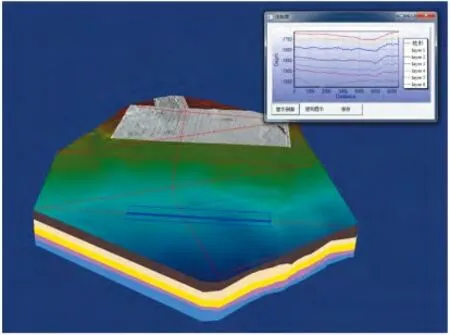
圖5 海底地質(zhì)環(huán)境綜合顯示效果圖
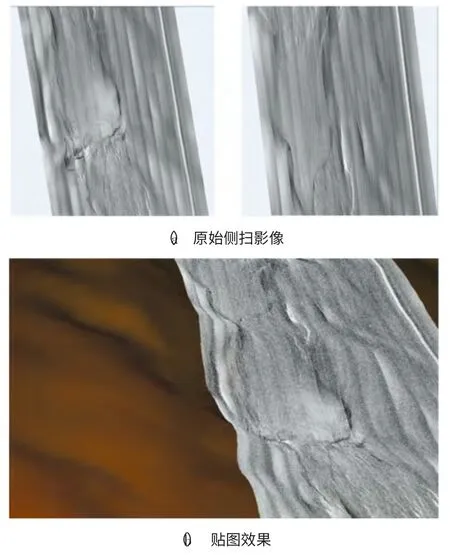
圖6 側(cè)掃聲吶影像和多波束綜合可視化效果圖
實(shí)驗(yàn)結(jié)果表明,此方法數(shù)據(jù)加載量大,視覺(jué)效果好,能直觀、全面的反映海底淺層環(huán)境,滿足實(shí)際應(yīng)用中高效運(yùn)行的需求。
5 結(jié)論與展望
與二維表達(dá)方式相比,三維GIS 能更加直觀、真實(shí)的表達(dá)海底地形、地貌和地質(zhì)結(jié)構(gòu)。本文提出了一種基于OpenGL 可編程管線的海底淺層聲學(xué)探測(cè)數(shù)據(jù)三維綜合可視化方法,在滿足視覺(jué)感受的同時(shí)實(shí)現(xiàn)了多維數(shù)據(jù)的交互式提取。使用該方法可以對(duì)多種格式的側(cè)掃聲吶影像進(jìn)行紋理貼圖,具有數(shù)據(jù)加載量大的優(yōu)點(diǎn),并且不受側(cè)掃聲吶影像和多波束數(shù)據(jù)分辨率不一致的限制。
下一步將根據(jù)實(shí)際應(yīng)用需求,在現(xiàn)有工作基礎(chǔ)上參考紋理切片和金字塔模型,研究在超大規(guī)模場(chǎng)景中多種高分辨率海底地質(zhì)環(huán)境數(shù)據(jù)的綜合可視化。
Estimating Surface Normals in a PointCloud. http://pointclouds.org/documentation/tutorials/normal_estimation.php
GDAL Data Model. http://www.gdal.org/gdal_datamodel.html.
Joseph O R, 1998. Computional Geometry In C. Cambridge University Press.
Kessenich J, Lunar G. The OpenGL Shading Language. 2012.8/2014.5.http://www.opengl.org/registry/doc/GLSLangSpec.4.30.pdf
Niles D R. GeoTIFF Revision 1.0 Specification. 2000/2014.http://www.remotesensing.org/geotiff/spec/geotiffhome.html.
Segal M,Akeley K.The OpenGL Graphic System:A Specification.2012.6/2014.5.http://www.opengl.org/ registry / doc /glspec44. core.pdf VTK 6.2.0 Documentation. 2014.3/2014.5. http://www.vtk.org/doc/nightly/html/index.html.
Wang R, Qian X L. OpenSceneGraph 3 Cookbook. 2012/2014. http: //www.packtpub.com/openscenegrap-3-for-advanced-3d-programming-using-api-cookbook/book.
Wolf D, 2011. Open G L 4.0 Shading Lauguage Cookbook. Packt Publishing Limited.
Zhang L, Bruno J, Zheng F, 2012. 3D Reconstruction of seabed surface through sonar data of AUVs.Indian Journal of Geo-Marine Sciences(0379-5136),41 (6) :509-515
陳超,王文珂,王懷輝,等,2012.一種海底地形與底質(zhì)的三維融合可視化方法.系統(tǒng)仿真學(xué)報(bào),24(9):1 936-1 944.
付飛,李艷輝譯,2012.OpenGL 超級(jí)寶典.北京:人民郵電出版社.
韓春花,張俊明,梁建峰,等,2011.側(cè)掃聲吶探測(cè)數(shù)據(jù)管理系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn).海洋通報(bào),30(20):188-193.
姜小俊,2009.海底淺層聲學(xué)探測(cè)空間數(shù)據(jù)集成與融合模型及GIS表達(dá)研究.浙江:浙江大學(xué).
金翔龍,2007.海洋地球物理研究與海底探測(cè)聲學(xué)技術(shù)的發(fā)展.地球物理學(xué)進(jìn)展,22(4):1 243-1 249.
李平,杜軍,2011. 淺地層剖面探測(cè)綜述. 海洋通報(bào),30(3):344-349.
蘇奮振,吳文周,平博,等,2014.海洋地理信息系統(tǒng)研究進(jìn)展.海洋通報(bào),33 (4):361-370.
武強(qiáng),徐華,2011.虛擬地質(zhì)建模與可視化.北京:科學(xué)出版社.
陽(yáng)凡林,2003.多波束和側(cè)掃聲吶數(shù)據(jù)融合及其在海底底質(zhì)分類中的應(yīng)用.武漢:武漢大學(xué).
趙建虎,2002.多波束深度及圖像數(shù)據(jù)處理方法研究.武漢:武漢大學(xué).
趙建虎,王愛(ài)軍,郭軍,2013.多波束與側(cè)掃聲吶圖像區(qū)塊信息融合方法研究.武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),38(3):287-289.
猜你喜歡
江蘇安全生產(chǎn)(2022年7期)2022-08-24 02:11:52
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
北京測(cè)繪(2022年6期)2022-08-01 09:19:06
選煤技術(shù)(2022年2期)2022-06-06 09:13:12
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測(cè)繪(2021年7期)2021-07-28 07:01:18
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
山東農(nóng)業(yè)工程學(xué)院學(xué)報(bào)(2019年11期)2020-01-19 02:49:22
傳媒評(píng)論(2019年4期)2019-07-13 05:49:14

- 海洋通報(bào)的其它文章
- 關(guān)于中國(guó)海洋學(xué)會(huì)2015年學(xué)術(shù)年會(huì)“海洋信息助推海洋強(qiáng)國(guó)建設(shè)”分會(huì)場(chǎng)征文的通知
- 《海洋通報(bào)》被遴選為《中國(guó)科學(xué)引文數(shù)據(jù)庫(kù)(CSCD)》核心庫(kù)(C庫(kù))來(lái)源期刊
- 海洋貝類細(xì)胞培養(yǎng)技術(shù)及其應(yīng)用
- 鹽城濱海灘涂表層沉積物重金屬生態(tài)風(fēng)險(xiǎn)評(píng)價(jià)
- 淤泥質(zhì)海岸圍墾促淤計(jì)算方法研究與應(yīng)用
- 面向海洋監(jiān)測(cè)的傳感數(shù)據(jù)可用性評(píng)價(jià)技術(shù)