基于FPGA的實時彩色圖像邊緣檢測算法的實現(xiàn)
2015-03-21 10:01:08凌朝東
液晶與顯示 2015年1期
關(guān)鍵詞:檢測
陳 虎,凌朝東*,張 浩,楊 驍,湯 煒
(1.華僑大學(xué) 信息科學(xué)與工程學(xué)院,福建 廈門361021;2.廈門市專用集成電路系統(tǒng)重點實驗室,福建 廈門361008)
1 引 言
邊緣是圖像的最基本特征,是圖像局部亮度變化最顯著的部分,是物體的輪廓或物體不同表面之間的交界在圖像中的反映,它是圖像分割、紋理特征提取和形狀提取等圖像分析的重要基礎(chǔ)。邊緣檢測是利用物體和背景在某種圖像特性上的差異來實現(xiàn),這些差異包括灰度、顏色或者紋理特征。在實時圖像處理中,由于實現(xiàn)邊緣檢測算法涉及的運算數(shù)據(jù)量很大,一般運算器的順序執(zhí)行或用傳統(tǒng)的軟件方法都很難達(dá)到實時性要求[1]。而采用FPGA 的并行結(jié)構(gòu)和流水線技術(shù),可提高圖像邊緣檢測的處理速度,滿足系統(tǒng)實時性要求。
Sobel算法是一種基于梯度的邊緣檢測算法,相比其他邊緣檢測算法,如Marr-Hildreth、Canny基于梯度信息的自適應(yīng)平滑濾波和基于小波的邊緣檢測算子等[2-4],其計算簡單,只涉及到乘加運算,同時具有非線性和一定的平滑效果。所以對于灰度圖像Sobel算子能夠取得很好的邊緣檢測效果,而對于彩色圖像,由于不能充分利用彩色圖像的顏色信息,因此會丟失原始圖像的一些細(xì)節(jié)信息,出現(xiàn)邊緣模糊現(xiàn)象,影響圖像后續(xù)的分析和處理[5]。有研究表明,彩色圖像中大約有90%與灰度圖像邊緣相同,但余下10%的邊緣單靠灰度圖像是檢測不出來的。
本文針對上述存在的不足,對Sobel算子進(jìn)行改進(jìn),通過增加邊緣檢測的方向模板,改善其對紋理復(fù)雜圖像的適應(yīng)能力,同時,引進(jìn)一種快速中值濾波方法對輸入圖像數(shù)據(jù)進(jìn)行去噪預(yù)處理,濾除由于圖像獲取、傳輸、存儲、處理和隨機(jī)干擾等產(chǎn)生的噪聲。實驗結(jié)果表明,本文涉及的系統(tǒng)能夠滿足實時性的要求,具有良好的檢測精度和抗噪能力。
2 中值濾波原理
在實時圖像采集中,不可避免的會引入噪聲,尤其是干擾脈沖和椒鹽類噪聲,噪聲的存在嚴(yán)重影響邊緣檢測的效果,中值濾波是一種基于排序統(tǒng)計理論的非線性平滑技術(shù),能有效平滑噪聲,且能有效保護(hù)圖像的邊緣信息,所以被廣泛用于數(shù)字圖像的邊緣提取,其基本原理是把數(shù)字圖像或數(shù)字序列中一點的值用該點一個鄰域內(nèi)各點的中值來代替。對二維中值濾波,其公式表示如下[6]:

其中:f (x ,y) ,g (x ,y) 分 別為原 始 圖 像 和 輸 出 圖像,W 為二維窗口,大小為n×n(n 一般為奇數(shù)),可以是3×3或5×5等,常用的形狀有方形、圓形和十字形等。
3 Sobel邊緣檢測算法
3.1 Sobel邊緣檢測算法原理
Sobel算子是一階導(dǎo)數(shù)的邊緣檢測算子,它在圖像空間利用兩個3×3的方向模板與圖像中的每個點進(jìn)行鄰域卷積來完成,其中,這兩個方向模板分別檢測水平和垂直邊緣,如圖1所示。

圖1 (a)一副圖像的3×3區(qū)域;(b)垂直Sobel算子;(c)水平Sobel算子 Fig.1 (a)3×3image area;(b)Vertical Sobel operator;(c)Horizontal Sobel operator
梯度值由式(2)確定[7]:
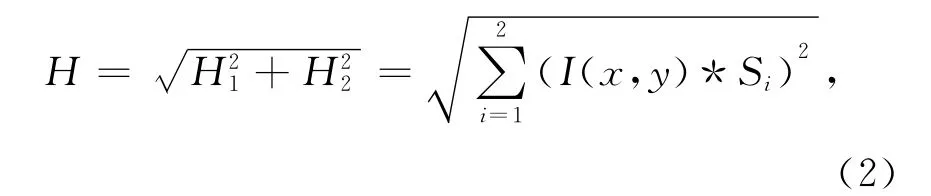
式中:I(x,y)為灰度圖像,*為卷積運算,Si(i=1,2)分別代表2個方向模板,最后把梯度H 與設(shè)定的閾值Th 進(jìn)行比較,若大于Th,則判定該點為邊緣部分,把中央像素灰度值P5設(shè)為255,否則判為非邊緣部分,灰度值P5設(shè)為0。
3.2 改進(jìn)的Sobel邊緣檢測算法
由于彩色圖像的每一個像素包含R、G、B 三個通道,且三者分布不一樣,導(dǎo)致各個通道得到的邊緣特征位置也不相同,因此直接利用傳統(tǒng)灰度圖像的處理方法來確定彩色圖像邊緣,就不能充分利用彩色圖像的顏色信息。為了能夠提取出清晰的邊緣圖像,并充分利用彩色圖像的特點,本文把傳統(tǒng)Sobel算子方向模板由2 個增加到了8個,如圖2 所示,就可以從多個方向檢測圖像邊緣,因此能在一定程度上解決了傳統(tǒng)算子梯度計算中的方位局限問題。
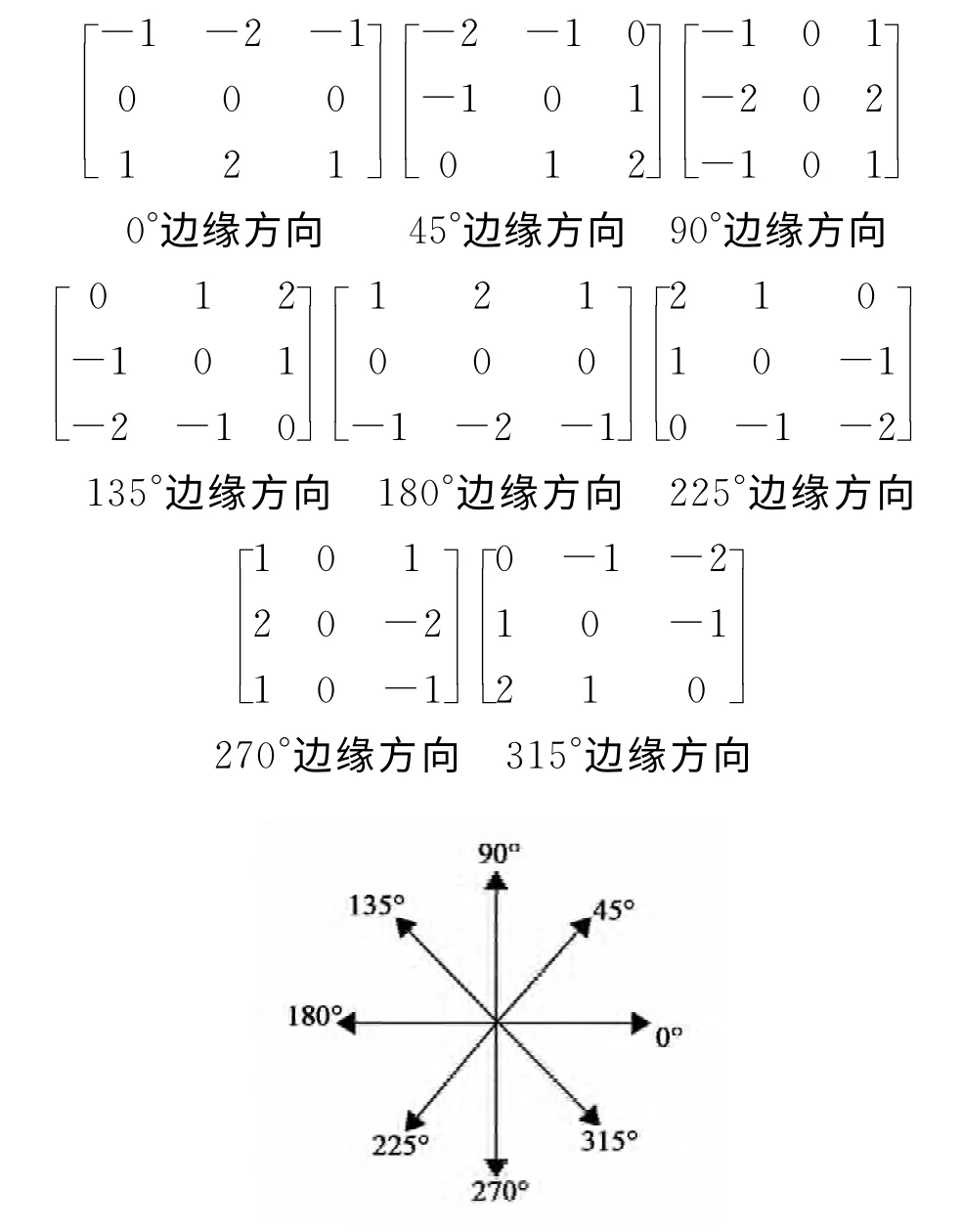
圖2 改進(jìn)的Sobel算子8方向邊緣檢測模板Fig.2 Improved Sobel operator edge detection templates of 8directions
實際上,圖像的灰度梯度方向的取值范圍應(yīng)為0°~360°,而這里只定義了8個方向的模板[8],當(dāng)然,繼續(xù)增加方向模板的數(shù)量可進(jìn)一步提高定位精度,但出于計算效率的考慮和邊緣寬度的限制,不宜再增加算子模板的數(shù)量[9]。
根據(jù)傳統(tǒng)Sobel算子邊緣檢測理論和提出的8方向模板Si(i=1,2,…8),對圖像中每個點進(jìn)行鄰域卷積運算,提取圖像8個方向上的邊緣成分,即:

圖像中每個像素的梯度值可表示為:

4 基于Sobel邊緣檢測算法的系統(tǒng)總體設(shè)計
4.1 基于FPGA 的邊緣檢測算法的系統(tǒng)總體架構(gòu)設(shè)計
根據(jù)系統(tǒng)要求,系統(tǒng)主要包括以下4 個模塊[10],即:實時圖像采集、圖像數(shù)據(jù)存儲、邊緣檢測、檢測結(jié)果顯示4 個模塊,基于FPGA 的實時圖像邊緣檢測硬件架構(gòu)如圖3。
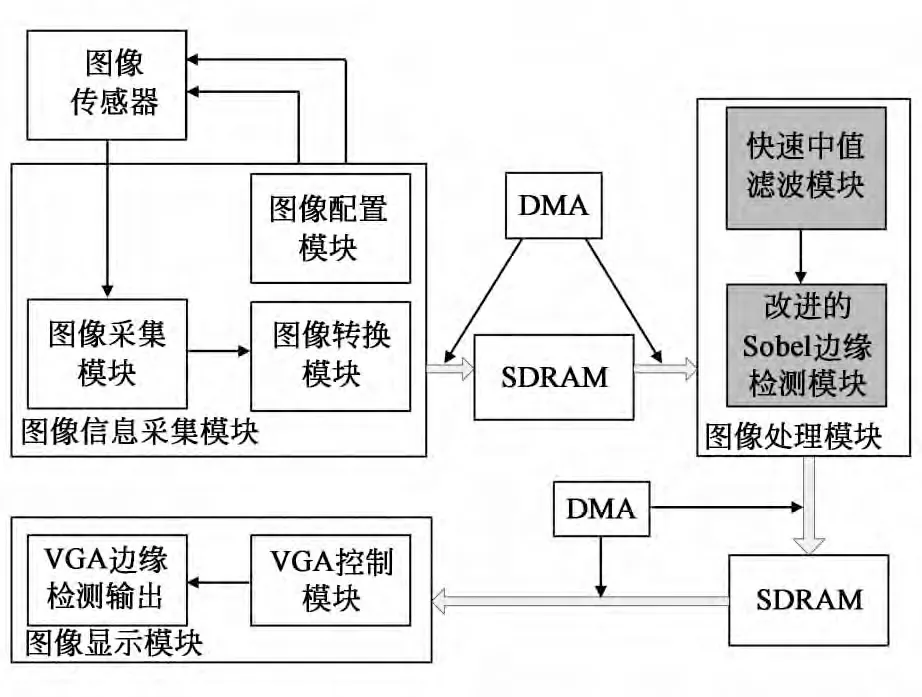
圖3 基于FPGA 的實時圖像邊緣檢測系統(tǒng)框圖Fig.3 System block diagram of real-time image detection based on FPGA
各模塊的功能如下:CMOS攝像頭實時采集數(shù)字圖像數(shù)據(jù),將采集到的原始圖像數(shù)據(jù)送入色彩轉(zhuǎn)換模塊將其轉(zhuǎn)換成RGB 格式圖像數(shù)據(jù);SDRAM 控制器將圖像數(shù)據(jù)存儲在片外存儲芯片SDRAM 中;經(jīng)快速中值濾波模塊進(jìn)行圖像去噪處理后,在Sobel邊緣檢測模塊進(jìn)行梯度運算處理[11];LCD 液晶屏控制模塊連續(xù)刷新屏幕將邊緣檢測的結(jié)果在液晶屏上顯示[12]。
4.2 中值濾波算法的設(shè)計與實現(xiàn)
采用FPGA 實現(xiàn)中值濾波算法電路設(shè)計主要包括3×3 模板生成模塊和排序模塊,如圖4所示[13]。
4.2.1 3×3模板生成模塊
為了得到3×3模板生成模塊,常使用FIFO模塊作為圖像數(shù)據(jù)的緩沖器,本設(shè)計通過調(diào)用Quartus II軟件中基于RAM 的移位寄存器宏模塊altshift_taps 實 現(xiàn) 行 延 遲 以 生 成3×3 模板[14-15],其中行緩存的深度等于輸入圖像的行像素總數(shù),然后,每行通過3個移位寄存器(3行共9個)進(jìn)行列延遲將數(shù)據(jù)并行輸出,如圖5所示。
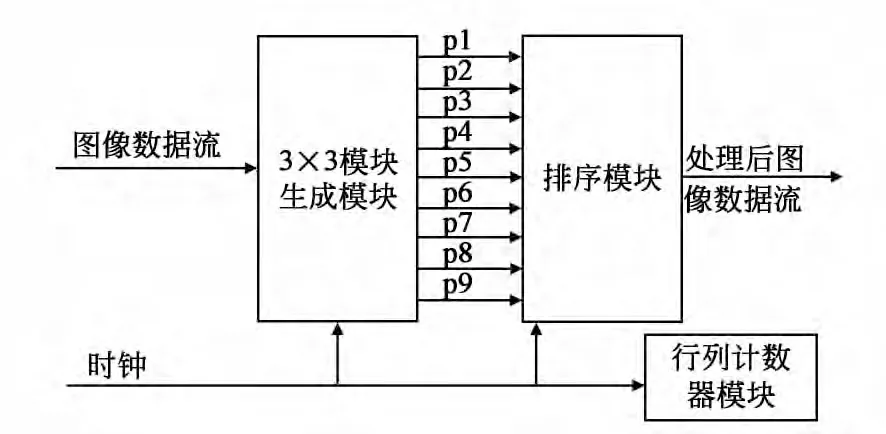
圖4 中值濾波圖像處理流程圖Fig.4 Image processing flow chart of median filtering
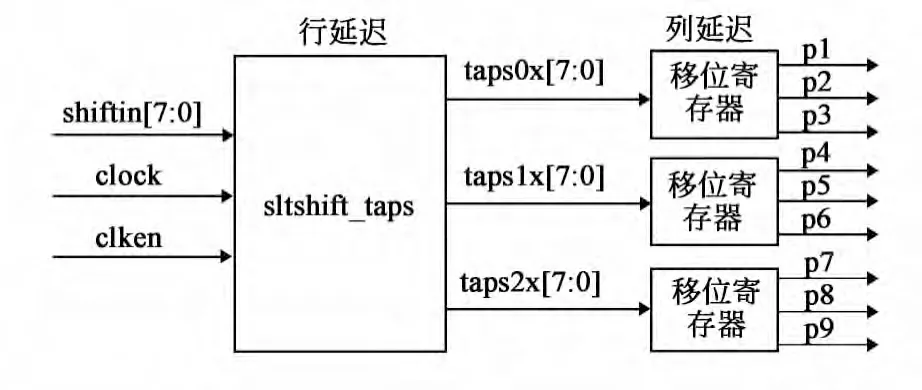
圖5 3×3窗口輸出數(shù)據(jù)硬件實現(xiàn)架構(gòu)Fig.5 Hardware implementation architecture of 3×3 output data window
4.2.2 排序模塊

圖6 快速中值濾波算法流程圖Fig.6 Fast median filtering algorithm flow chart
相比于傳統(tǒng)中值濾波算法采用冒泡方法進(jìn)行排序,快速中值濾波只需要19次比較運算即可得出中值,由于其設(shè)計簡明扼要,易于用Verilog HDL語言編寫,且在一定程度上節(jié)省了硬件資源,以滿足圖像實時性要求,圖6為快速中值濾波算法流程圖,其中,Pi(i=1,2,…9)為上述3×3窗生成模塊的輸出數(shù)據(jù),也是算法模塊的輸入數(shù)據(jù)。A1,A2,A3,B1,B2,B3,C均為3點比較器,該比較器對輸入的3個像素值進(jìn)行排序輸出,自左向右依次為最大值、中值、最小值(圖中分別以max、med、min表示)。
由圖6可知,共需要3級比較實現(xiàn)中值輸出:第一級,通過比較器A1,A2,A3分別對輸入的數(shù)據(jù)進(jìn)行排序,將各自的最大值送入B1,中值送入B2,最小值送入B3。第二級,將B1的最小值送入C,B2的中值送入C,B3的最大值送入C[16]。第三級,將C 的中值作為輸入9 個像素值的中值輸出。
4.2.3 行列計數(shù)器模塊
在對圖像進(jìn)行處理過程中,隨著3×3方形框不斷向右滑動,達(dá)到第n-1,n 和n+1行的最右端,此時,第n行處理完畢需轉(zhuǎn)去處理n+1行數(shù)據(jù),同時方形框開始移至第n,n+1和n+2行的最左端,開始對窗口內(nèi)數(shù)據(jù)進(jìn)行處理。因此,需要一個模塊來判斷數(shù)據(jù)是否已經(jīng)到達(dá)圖形邊緣,本文圖像數(shù)據(jù)為二維陣列,需要設(shè)計兩個計數(shù)器:行、列計數(shù)器,其模塊圖如圖7所示。
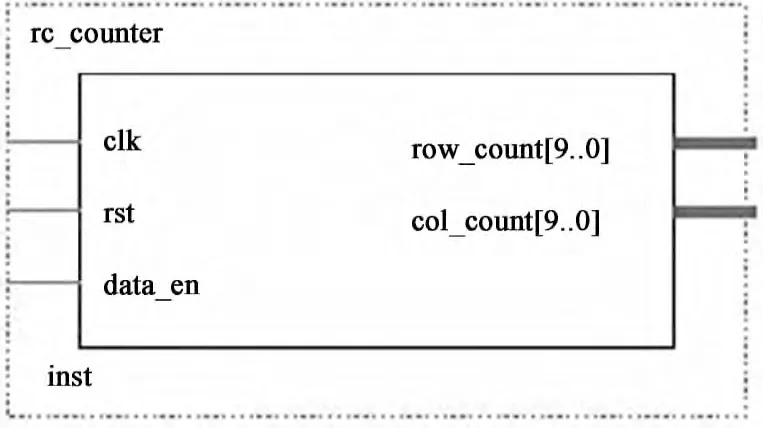
圖7 行列計數(shù)器模塊Fig.7 Rows and columns counter module
4.3 Sobel邊緣檢測算法的硬件實現(xiàn)
傳統(tǒng)Sobel邊緣檢測算法框圖如圖8所示。
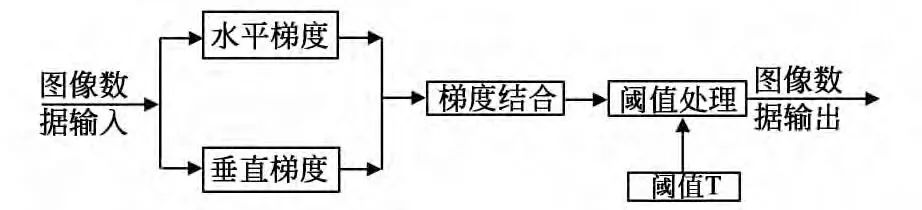
圖8 傳統(tǒng)Sobel算子邊緣檢測算法框圖Fig.8 Block diagram of traditional Sobel operator edge detection algorithm
而本文在此基礎(chǔ)上,對彩色圖像每個顏色通道進(jìn)行8個方向的實時邊緣檢測輸出,則本文提出的基于改進(jìn)的Sobel算子邊緣檢測算法框圖如圖9所示[17]。

圖9 基于改進(jìn)的Sobel算子的彩色圖像邊緣檢測流程圖Fig.9 Color image edge detection based on the improved Sobel operator flow chart
具體處理步驟如下:
(1)將彩色圖像的每個像素點的顏色分解為R、G、B 3個分量。
(2)對(1)中3分量中的數(shù)據(jù)分別中值濾波圖像去噪預(yù)處理。
(3)用公式(3)分別計算R、G、B 3個分量在0°,45°,…,315°8個方向的梯度值。
(4)用公式(4)分別對彩色圖像的每個顏色分量計算每個像素的梯度值。
(5)綜合(4)中三通道邊緣信息,并與閾值比較,最終邊緣圖像輸出。
(6)對彩色圖像中的每一個像素進(jìn)行上述5步驟處理。
由上分析知道,Sobel邊緣檢測算法實現(xiàn)的硬件實現(xiàn)系統(tǒng)應(yīng)包括圖像數(shù)據(jù)緩沖存儲模塊、梯度計算模塊和閾值比較模塊。各個模塊功能的實現(xiàn)可通過調(diào)用Quartus II軟件提供的各種宏功能模塊(Megafunctions)實現(xiàn)[18],如圖10所示。
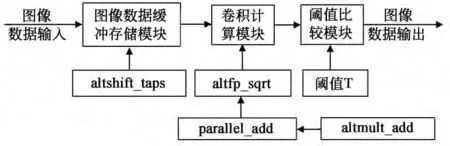
圖10 Sobel邊緣檢測算法硬件實現(xiàn)的系統(tǒng)框圖Fig.10 System diagram of the hardware implementation of Sobel edge detection algorithm
由于梯度計算模塊主要是為了完成各個算子分別與3×3圖像像素矩陣的卷積運算,此處也通過調(diào)用altshift_taps實現(xiàn)3×3的圖像數(shù)據(jù)緩沖存儲[19]。下面主要介紹梯度計算模塊和閾值比較模塊。
4.3.1 梯度計算模塊
圖11是各方向3×3算子模板與圖1(a)所示的3×3圖像區(qū)域卷積運算的原理圖。從圖中可以看出,要實現(xiàn)卷積運算需做乘加運算,較之以往分立的D 觸發(fā)器和加法器以及乘法器來完成,本文采用可編程乘加器altmult_add模塊和可編程多路并行加法器parallel_add模塊實現(xiàn),大大簡化了設(shè)計的同時提高了算法的性能。
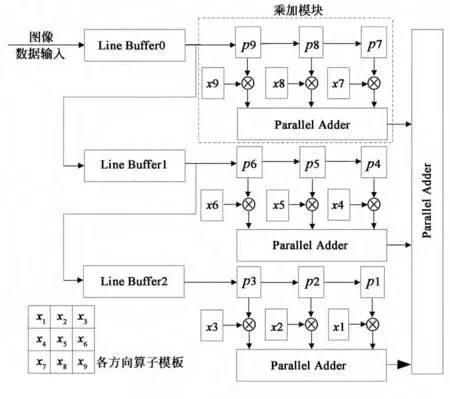
圖11 具有3條Line Buffer的卷積運算結(jié)構(gòu)圖Fig.11 Structure of 3line buffer convolution operation
由圖2和公式(4),要處理圖像中的每個像素點都用8個模板做卷積,每個模板分別對相應(yīng)方向的邊緣影響最大。邊緣檢測算子的中心與要檢測的像素點相對應(yīng),進(jìn)行8次卷積運算,8次卷積運算結(jié)果分別自乘平方相加送到浮點平方根altfp_sqrt模塊,計算出的平方根作為該點的輸出位,運算的結(jié)果是一副邊緣幅度圖像,在邊緣檢測中,Sobel算子對像素的位置的影響做了加權(quán),加權(quán)平均邊寬≥2像素,因此效果更好。
由圖9框圖可知,由于彩色圖像的每一個像素包含R、G、B 3個通道,分別對其3個通道進(jìn)行上述運算,最終得到3個中心像素點的梯度值。
4.3.2 閾值比較模塊
此時,把上一步得到的彩色圖像3 顏色(R、G、B)通道的中心像素點的梯度值分別與一個設(shè)定的閾值Th 進(jìn)行比較,如果大于Th,則該顏色通道的輸出為1,否則為0。最后將3個比較器的輸出融合得到彩色圖像的邊緣圖像,其中,最終邊緣圖像的獲得通過一個3 輸入的或門實現(xiàn)[20]。如果最終的邊緣圖像輸出為一個,則每個顏色通道的值設(shè)定為255,否則設(shè)置為0,這些數(shù)據(jù)最終通過LCD 液晶顯示模塊控制器傳送到LCD 液晶屏上進(jìn)行結(jié)果顯示。
5 實驗結(jié)果與分析
為了驗證本文所提出系統(tǒng)的邊緣檢測效果,以Altera DE2-70開發(fā)板為平臺,將改進(jìn)算法與傳統(tǒng)的Sobel算法的邊緣檢測效果進(jìn)行比較,如圖12 所示。其中圖12(a)為原彩色圖像,圖12(b)是傳統(tǒng)Sobel算法處理后的邊緣圖像,圖12(c)是經(jīng)快速中值濾波預(yù)處理后,運用改進(jìn)的Sobel算法處理后的結(jié)果。通過對比可知,與傳統(tǒng)Sobel算法邊緣檢測效果相比,改進(jìn)的Sobel算法獲得了較多的邊緣信息,視覺效果高于前者,且有效濾除部分噪聲。實驗結(jié)果表明,本文所設(shè)計的實時彩色圖像邊緣檢測系統(tǒng),具有良好環(huán)境適應(yīng)能力,抗噪能力強(qiáng),且圖像邊緣定位準(zhǔn)確,能夠?qū)崟r有效地對圖像進(jìn)行邊緣提取。
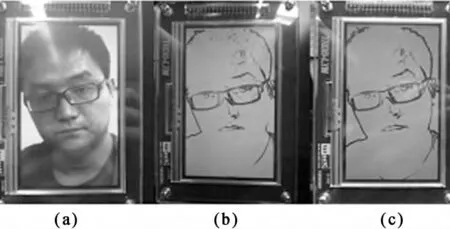
圖12 (a)原彩色圖像;(b)傳統(tǒng)Sobel算法;(c)改進(jìn)的Sobel算法(某幀視頻邊緣檢測結(jié)果截圖)Fig.12 (a)Original color image(b)Result of traditional Sobel algorithm;(c)Result of improved Sobel algorithm
本文所設(shè)計的系統(tǒng),選用Altera 公司的EP2C70為目標(biāo)芯片,經(jīng)Quartus II 綜合器綜合后,得出改進(jìn)的Sobel邊緣檢測模塊硬件資源使用情況綜合報告如表1所示,從表中可以看出,在算子模板由2個增加到8個,且對彩色圖像進(jìn)行算法實現(xiàn)的情況下,本文所用的改進(jìn)的Sobel邊緣檢測模塊僅占用了2%的邏輯單元,在算法復(fù)雜度提高的情況下,效果已相對改觀,同時結(jié)合FPGA 流水線任務(wù)處理技術(shù)以及并行信息處理的特點,滿足系統(tǒng)實時性要求。

表1 改進(jìn)Sobel邊緣檢測模塊片上資源占用情況Tab.1 On-chip resources occupancy of the improved Sobel edge detection module
6 結(jié) 論
借助Altera DE2-70FPGA 硬 件 開 發(fā) 平 臺,提出了一種基于改進(jìn)的實時彩色圖像邊緣檢測系統(tǒng)。首先將彩色圖像分離出R、G、B三個通道,再用快速中值濾波對每個通道輸入圖像數(shù)據(jù)進(jìn)行去噪預(yù)處理,然后,在傳統(tǒng)Sobel算子基礎(chǔ)上增加方向算子模板,提高對復(fù)雜環(huán)境的適應(yīng)能力。實驗結(jié)果表明,本文系統(tǒng)將改進(jìn)的Sobel邊緣檢測算法從灰度圖像移植到彩色圖像,有效地抑制了噪聲,邊緣定位更準(zhǔn)確,并且能夠獲得比傳統(tǒng)的邊緣檢測算子更多的邊緣輪廓信息。可用于對實時性要求較高的智能監(jiān)控、安防、工業(yè)控制等領(lǐng)域。
[1] 曹楊,蘇麗娜,沈琪,等.一種改進(jìn)的Sobel邊緣檢測算法的設(shè)計及其FPGA 實現(xiàn)[J].微電子學(xué)與計算機(jī),2012,29(10):124-127.Cao Y,Su L N,Shen Q,et al.Design and realization of improved sobel edge detection algorithm based on FPGA[J].Microelectronics &Computer,2012,29(10):124-127.(in Chinese)
[2] Xin G,Ke C,Xiaoguang H.An improved Canny edge detection algorithm for color image[C]//2012 10th IEEE International Conference on Industrial Informatics(INDIN),IEEE,2012:113-117.
[3] 劉博超,趙建,孫強(qiáng).基于邊緣改進(jìn)的Harris角點檢測方法[J].液晶與顯示,2013,28(6):939-942.Liu B C,Zhao J,Sun Q.Improved Harris corner detection method based on edge[J].Chinese journal of Liquid Crystals and Displays,2013,28(6):939-942.(in Chinese)
[4] 陳娟,陳乾輝,師路歡,等.圖像跟蹤中的邊緣檢測技術(shù)[J].中國光學(xué)與應(yīng)用光學(xué),2009,2(1):46-53.Chen J,Chen Q K,Shi L H,et al.Edge detection technology in imaging tracking[J].Chinese Journal of Optics and Applied Optics,2009,2(1):46-53.(in Chinese)
[5] 張鳳晶,白新偉,于光,等.一種基于Sobel的彩色圖像邊緣檢測新算法[J].長春理工大學(xué)學(xué)報(自然科學(xué)版),2012,35(1):122-124.Zhang F J,Bai X W,Yu G,et al.A new arithmetic of color image edge detection based on sobel operator[J].Journal of Changchun University of Science and Technology(Natural Science Edition),2012,35(1):122-124.(in Chinese)
[6] ZhouY L,Huang C,Zhai L F.A median image filtering algorithm based on statistical histogram[C]//2013 Fifth International Conference on Measuring Technology and Mechatronics Automation (ICMTMA),IEEE,2013:17-20.
[7] 陶李,王玨,鄒永寧,等.改進(jìn)的Zernike矩工業(yè)CT 圖像邊緣檢測[J].中國光學(xué),2012,5(1):48-56.Tao L,Wang Y,Zou Y N,et al.Improved Zernike moment of method for industrial CT image edge detection[J].Chinese Optics,2012,5(1):48-56.(in Chinese)
[8] 王田,劉偉寧,孫海江,等.基于復(fù)雜度和方向梯度的紅外弱小目標(biāo)檢測方法[J].液晶與顯示,2012,27(5):692-696.Wang T,Liu W N,et al.Detecting algorithm of infrared small dim targets based on complexity and orientation gradient[J].Chinese journal of Liquid Crystals and Displays,2012,27(5):692-696.(in Chinese)
[9] 馬宇飛.基于梯度算子的圖像邊緣檢測算法研究[D].西安電子科技大學(xué),2012.Ma Y F.Research on image edge detection based on gradient operators[D].Xidian University,2012.(in Chinese)
[10] 楊新華,寇為剛.基于FPGA 的Sobel算子圖像邊緣檢測算法[J].儀表技術(shù)與傳感器,2013(1):34.Yang X H,Dou W G.Sobel operation image edge detection algorithm based on FPGA[J].Instrument Technique and Sensor,2013(1):34.(in Chinese)
[11] 馮輝宗,陳葉,徐洋.基于FPGA 的實時圖像采集與Sobel邊緣檢測[J].傳感器與微系統(tǒng),2011,30(6):116-118.Feng H Z,Chen Y,Xu Y.Real-time image acquisition and Sobel edge detection based on FPGA[J].Transducer and Microsystem Technologies,2011,30(6):116-118.(in Chinese)
[12] 劉紫燕.實時圖像邊緣檢測的設(shè)計及FPGA 實現(xiàn)[J].電子科技,2011,24(12):1-3.Liu Z Y.Edge detection of real-time image based on FPGA[J].Electronic Science &Technology,2011,24(12):1-3.(in Chinese)
[13] 王瑞,劉廣斌.基于FPGA 的圖像快速中值濾波算法實現(xiàn)[J].計算機(jī)工程與應(yīng)用,2010,46(9S):32-34.Wang R,Liu G B.Hardware implementation of median filter based on FPGA for image processing[J].Computer Engineering and Application,2010,46(9S):32-34.(in Chinese)
[14] 王軍輝,李瑞克,劉小洋.基于改進(jìn)Sobel算法的實時邊緣檢測系統(tǒng)[J].計算機(jī)與數(shù)字工程,2012,40(6):130-132.Wang J H,Li R K,Liu X Y.Real-time edge detection system based improved Sobel algorithm [J].Computer&Digital Engineering,2012,40(6):130-132.(in Chinese)
[15] Alghurair D,Al-Rawi S S.Design of Sobel operator usingfield programmable gate arrays[C]//2013 International Conference on Technological Advances in Electrical,Electronics and Computer Engineering(TAEECE),IEEE,2013:589-594.
[16] 溫建平.人臉檢測算法及其FPGA 實現(xiàn)[D].上海:華南理工大學(xué),2012.Wen J P.Face Detection algorithm and its FPGA implementation[D].Shanghai:South China University of Technology.2012.(in Chinese)
[17] 熊琰,龔華軍,沈曄青.一種快速有效的彩色圖像邊緣檢測方法[J].計算機(jī)技術(shù)與發(fā)展,2007,17(4):128-130.Xiong Y,Gong H J,Shen Y Q.Feature point detection based on color image[J].Computer Technology and Development,2007,17(4):128-130.(in Chinese)
[18] 張麗紅,凌朝東.基于FPGA 的Sobel邊緣檢測應(yīng)用[J].電子技術(shù)與應(yīng)用,2011,37(8):26-29.Zhang L H,Ling C D.Application of Sobel edge detection based on FPGA [J].The application of electronic technology,2011,37(8):26-29.(in Chinese)
[19] 李明,趙勛杰,毛偉民.Sobel邊緣檢測的FPGA 實現(xiàn)[J].現(xiàn)代電子技術(shù),2009,16:44-46.Li M,Zhao X J,Mao W M.Implementation of Sobel edge detection based on FPGA[J].Modern Electronic Technology,2009,16:44-46.(in Chinese)
[20] Singh S,Saini A K,Saini R.Real-time FPGA based implementation of color image edge detection[J].International Journal of Image,Graphics and Signal Processing (IJIGSP),2012,4(12):19-25.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48