一類競爭模型正解的唯一性和多重性
2015-03-20 08:02:20李海俠
大連理工大學學報 2015年4期
李海俠
(寶雞文理學院 數學與信息科學學院,陜西 寶雞 721013)
0 引 言
生態學經歷了漫長的發展過程,已成為一個多學科交叉的綜合性學科.種群生態學是其中一個重要的分支,它是描述種群與環境及種群之間相互作用的動力學關系的學科.生物學家和生態學家把自然界中種群與環境以及種群之間相互競爭、捕食與被捕食、互惠作用等具體情況建成數學模型,近年來受廣大學者們關注的一類模型是Lotka-Volterra 模 型[1-3].然 而,經 典 的Lotka-Volterra模型中的反應函數為一條無界的直線,并不能準確反映種群間的相互作用關系.在不斷的探索和研究過程中,人們根據一些具體的生態背景提出更合理更符合實際的功能反應函數.Holling[4]于1965年提出了Holling型功能反應函數:
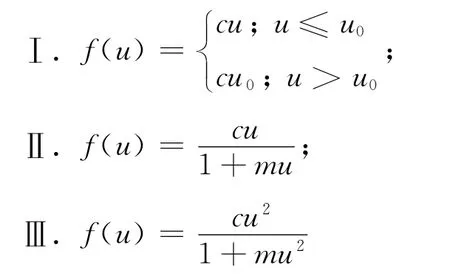
對帶有Holling Ⅰ和Holling Ⅱ型功能函數的模型已有很多研究結果[5-9].另外,國內外很多專家也考察了帶有Holling Ⅲ型功能函數的捕食-食餌模型[10-12],其中文獻[12]在Nuemann邊界條件下研究了一類帶有Holling Ⅲ型功能函數的捕食-食餌模型,得到了正解的局部和全局穩定性.然而目前帶有Holling Ⅲ型功能函數的競爭模型的研究很少見.因此本文研究一類帶有Holling Ⅲ型功能函數的競爭模型,包括其正解的存在性、唯一性、全局穩定性和多重性.
1 預備知識
為了得到重要的結論,先給出一些預備知識.

則λ1(q)連續依賴q,λ1(q)是簡單的.而且,如果q1≤q2,q1q2,則λ1(q1)<λ1(q2).為了簡單起見,定義λ1(0)為λ1,相應于λ1的主特征函數記為ψ1.
非線性問題

若r>λ1,則式(1)有唯一正解.定義唯一正解為θr.特別地,θr<r且θr連續依賴r.
2 正解的存在性、穩定性和唯一性
本文在Dirichlet邊界條件下研究如下帶有Holling Ⅲ型功能函數的競爭模型:
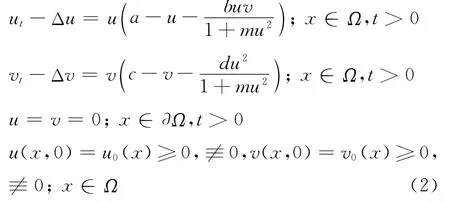
其中Ω是Rn(n≥1)中具有光滑邊界的有界區域,u、v分別表示兩競爭物種的密度.系統(2)中的參數a、b、c、d、m均為正常數.
從生物的現實意義上來講,物種是否能夠共存是競爭模型研究中最令人感興趣的內容之一.因此,本文主要研究系統(2)對應的平衡態系統
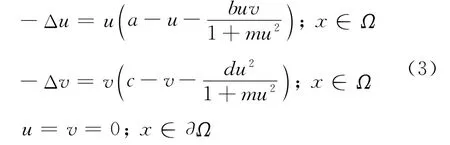
正解的存在性、唯一性和多解性.
本文利用不動點指標理論研究系統(3)正解的存在性.首先,運用極值原理、上下解方法以及特征值變分原理易得系統(3)正解的先驗估計和正解存在的一些必要條件.
引理1 若系統(3)有非負解(u(x),v(x)),則0≤u(x)≤a,0≤v(x)≤c,x∈Ω.
引理2 若系統(3)存在正解,則a>λ1,c>λ1.
引理3 若系統(3)存在正解(u(x),v(x)),則u≤θa,v≤θc.而且,若>λ1,則u≥θa(1-bc),v≥θc-d/m.
為了計算不動點指數,引入以下記號:E=C0(Ω)×C0(Ω),其中C0(Ω)={w∈C(Ω):w(x)=0,x∈Ω};W=P1×P2,其中Pi={w∈∈E:u<a+1,v<c+1};D′=(intD)∩W.
為

其中M為充分大的正常數,滿足M>max{a(1+2bc),c+da2}.故At是緊的且連續可微的.記A1=A,則系統(3)有正解當且僅當A在D′中有不動點.記
引理4 (1)若a>λ1且c≠λ1或a≠λ1且c>λ1,則indexW(A,(0,0))=0;若a<λ1且c<λ1,則indexW(A,(0,0))=1;
(2)indexW(A,D′)=1;
(3)設a>λ1.若c>c*,則indexW(A,(θa,0))=0;若c<c*,則indexW(A,(θa,0))=1;
(4)設c>λ1.若a>λ1,則indexW(A,(0,θc))=0;若a<λ1,則indexW(A,(0,θc))=1.
證明 因為(1)~(4)的證明類似,所以在此只證明(3).根據定義得{P2\{0}}.于是A′(θa,0)(ξ,η)=(ξ,η)等價于
(i)因為c>c*,所以則存在ψ>0滿足(-Δ+令t0=1/μ,則0<t0<1且(I-t0A′(θa,0))(0,ψ)∈S(θa,0),因此A′(θa,0)在W(θa,0)上具有α性質.由文獻[1]中定理1知,indexW(A,(θa,0))=0.
(ii)假設A′(θa,0)在上具有α性質,即存在t0∈(0,1),(ξ,η)∈\S(θa,0)使得(It0A′(θa,0))(ξ,η)∈S(θa,0),則由于c<c*,因此[r(-Δ+矛盾.故A′(θa,0)在上不具有α性質,由文獻[1]中定理1得indexW(A,(θa,0))=(-1)σ,其中σ為A′(θa,0)所有大于1的特征值的代數重數之和.再利用c<c*易得A′(θa,0)沒有大于1的特征值,從而σ=0,故indexW(A,(θa,0))=1.□
由引理4和度的可加性得到系統(3)正解的存在性定理.
定理1 若a>λ1且c>c*,則系統(3)至少存在一個正解.
接下來將運用橢圓方程正則性理論及其線性算子擾動理論討論參數b充分小時正解的唯一性和穩定性.首先考察下述方程:
易知,當c>c*時,方程(4)有唯一的正解,記為v*.
引理5 如果a>λ1,c>c*,則當b→0+時,系統(3)的任意正解(u,v)都滿足(u,v)→(θa,v*).
證明 設bi→0+(i→∞),(ui,vi)是b=bi時系統(3)的正解,那么(ui,vi)滿足
由引理1知,(ui,vi)關于i一致有界.根據橢圓方程正則性理 論關于i有界,從而存在{(ui,vi)}i∞=1的子列(仍記為它自身)及非負函數,使得在中(ui,vi)→在式(5)中令i→∞可得
顯然上述方程有4 個非負解(0,0),(θa,0),(0,θc),(θa,v*).下證
假設≡0,則ui→0.記那么Ui滿足

定理2 若a>λ1,c>c*,則存在充分小的正常數b*,當b≤b*時,系統(3)有唯一正解,且該正解是全局吸引的.
證明 令
則T(b,u,v)=0的解即為系統(3)的解.由于a>λ1,c>c*,因此(b,u,v)=(0,θa,v*)是系統(3)的解.令
則L(φ,ψ)=0等價于
顯然φ≡0.由得ψ≡0.因此0不是L的特征值.另外,由Riesz-Schauder定理易推出L的特征值都大于0,故(θa,v*)非退化和線性穩定.

記L為系統(3)在(u,v)處的線性化算子,那么由引理5知,當b→0+時,L→L.由線性算子擾動理論知,的所有特征值實部都大于0,故當b→0+時,系統(3)的任意正解都非退化和線性穩定.又由于系統(3)是一個單調動力系統,利用文獻[8]中的引理2.3(c)知,系統(3)至多有一個正解.結合定理1知系統(3)有唯一正解.再次運用文獻[8]引理2.3(b)可得系統(3)的唯一正解是全局吸引的.□
3 正解的穩定性和多重性
本章以c為分歧參數應用分歧理論和度理論討論系統(3)正解的多重性.為此引入空間
由Crandall-Rabinowitz分歧定理[13]易得
定理3 設a>λ1固定,則(c*,θa,0)是系統(3)的分歧點且在(c*,θa,0)的鄰域內系統(3)存在形式 為(c(s),u(s),v(s))=(c(s),θa+s(φ1 +r(s)),s(1 +t(s)))(0<s<<1)的正解,這里1是c*對應的主特征函數且而且,c(0)=c*,r(0)=0,t(0)=0,r,t∈Z,其中X=span{(φ1,1)}Z.
為了后面需要,給出如下引理.
引理6c(s)在s=0處的微分滿足c′(0)=
證明 將(c(s),u(s),v(s))= (c(s),θa+s(φ1+r(s)),s(1+t(s)))代入式(3)的第二個方程中,兩邊同除s,關于s微分并令s=0,可得上式兩邊同乘1 并在Ω上積分知結論成立.
于是根據線性算子的擾動理論和分歧解的穩定性理論有
引理7 如果I>0且0<s<<1,則定理3得到的正分歧解(u(s),v(s))穩定.
接下來,將局部分歧延拓為全局分歧.
令U=θa-u,V=v.則U,V≥0滿足
令ci(μ)(μ≥1)是如下特征值問題
-μΔV=,x∈Ω;V=0,x∈Ω的特征值,則ci(μ)關于μ≥1遞增,可排列為0<c1(μ)<c2(μ)≤… →∞且c1(1)=c*.
通過類似于文獻[6]的方法得當c<c*時,i(T(c,·),0)=(-1)0=1.當c*<c<c2(1)時,i(T(c,·),0)=(-1)1=-1.于是由文獻[14]的全局分歧定理可知存在從(c*,θa,0)分歧出來滿足G(c,U,V)=0的連通分支γ.而且,γ-{(c*,θa,0)}滿足下列條件之一:
(i)γ-{(c*,θa,0)}連接點(c*,θa,0)和(,θa,0),其中c*≠;
(ii)γ-{(c*,θa,0)}在R+×X內延伸到∞;
(iii)γ-{(c*,θa,0)}包含點(c,θa-u,v)和(c,θa+u,-v),其中(u,v)≠(0,0).
定理4 設a>λ1.則
(a)γ-{(c*,θa,0)}在P內從點(c*,θa,0)出發延伸到∞;
證明 (a)首先證明γ-{(c*,θa,0)}P.假設γ-{(c*,θa,0)}P,則存在序列{(cn,un,vn)}∈γ∩P和點P,使得因為所以或者且存在x0∈Ω使得或者且存在x1∈Ω使得=0.由強極值原理可知u≡0.類似可知v≡0.因此于是考慮如下3種情況:
(A)設≡0且≡0.則(cn,un,vn)→(c,0,0).令則Un滿足-ΔUn=U(
n a-由Lp估計和Sobolev嵌入定理可假設當n→∞時,在C1()中Un→U≥0,0.則U滿足-ΔU=aU,x∈Ω;U=0,x∈Ω.又由強極值原理可知U>0,x∈.因此,a=λ1,矛盾.
(B)如果≡0且0,即類似于(A)的分析可得a=λ1,矛盾.
(C)如果0且≡0,即則令則Vn滿足=0,x∈Ω.類似于(A)的分析可得=c*,矛盾.因此,γ-{(c*,θa,0)}P.于是,(i)和(iii)是不可能的.只有情況(ii).
(b)由引理1、Lp估計和Sobolev嵌入定理可知γ在R+×X內延伸到∞的唯一方式就是隨著參數c到∞.最后,由引理2得{c:(c,u,v)∈γ}=其中=inf{c>λ1:(c,u,v)∈γ}.
定理5 設a>λ1且I<0,則存在常數∈(λ1,c*)使得當時系統(3)至少有兩個正解;當c∈[c*,∞)時系統(3)至少有一個正解.
證明 首先由定理1可知當c>c*時系統(3)至少有一個正解.需要證明當時系統(3)至少有兩個正解且c=c*時系統(3)至少有一個正解.
定義算子Bτ:D′→W為
這里Q充分大使 得Q>max{a(1+2τbc),c+τda2}且τ∈[0,1].顯然系統(3)有非負解當且僅當B1在D′中有不動點.
設Dε={(u,v)∈W:(u,v)-(θa,0)E<ε},由前面的討論可知存在常數ε和∈(λ1,c*)使得對于c∈[,c*)系統(3)有唯一正解(uc,vc)∈Dε.因此,只需要證明對于系統(3)在D′\Dε上有正解即可.
令D1=D′\Dε.由引理1可知Bτ在D1上沒有不動點.于是根據不動點指數的同倫不變性可知indexW(B1,D1)=indexW(B0,D1).顯然B0在D1內有不動點(0,0),(0,θc),(θa,θc).用文獻[1]中定理1易證indexW(B0,(0,0))=indexW(B0,(0,θc))=0.另一方面,由(θa,θc)非退化和線性穩定 得I-B′0(θa,θc)在上 可逆,且由=S(θa,θc)知B′0(θa,θc)在上沒有α性質.于是indexW(B0,(θa,θc))=(-1)δ.利用特征值的比較原理易得δ=0.因此,由文獻[1]中定理1 知indexW(B0,(θa,θc)) =1.于是,indexW(B1,D1)=indexW(B0,D1)=indexW(B0,(0,0))+indexW(B0,(0,θc))+indexW(B0,(θa,θc))=1.最后結合引理4 得indexW(B1,D1)=indexW(B1,(0,0))+indexW(B1,(0,θc))=0,這表明系統(3)在D\Dε內至少有一個正解.
4 數值模擬
在一維情形Ω=(0,l)下利用Matlab工具做數值模擬來驗證前面研究得到的理論結果.取l=2π,計算可得λ1=1/4.取初值為為初值系數.
根據定理1的條件取值進行數值模擬,驗證系統(3)正解的存在性,其中的兩個例子見圖1,這與定理1的結論一致.在定理2的條件下取值進行數值模擬,發現系統(2)的正解與時間t無關,即達到平衡態,其中的例子見圖2,參數取值為a=7,b=0.3,c=5,m=4,d=3,初值系數r=0.1.另外,為了驗證正解的穩定性,在確定的參數下,選取不同的初值進行模擬,結果發現有唯一的正解且該正解穩定,見圖3,參數取值為a=7,b=0.3,c=5,m=4,d=3,初值系數r=0.5,1.5,3,5,8,這與定理2的結論吻合.
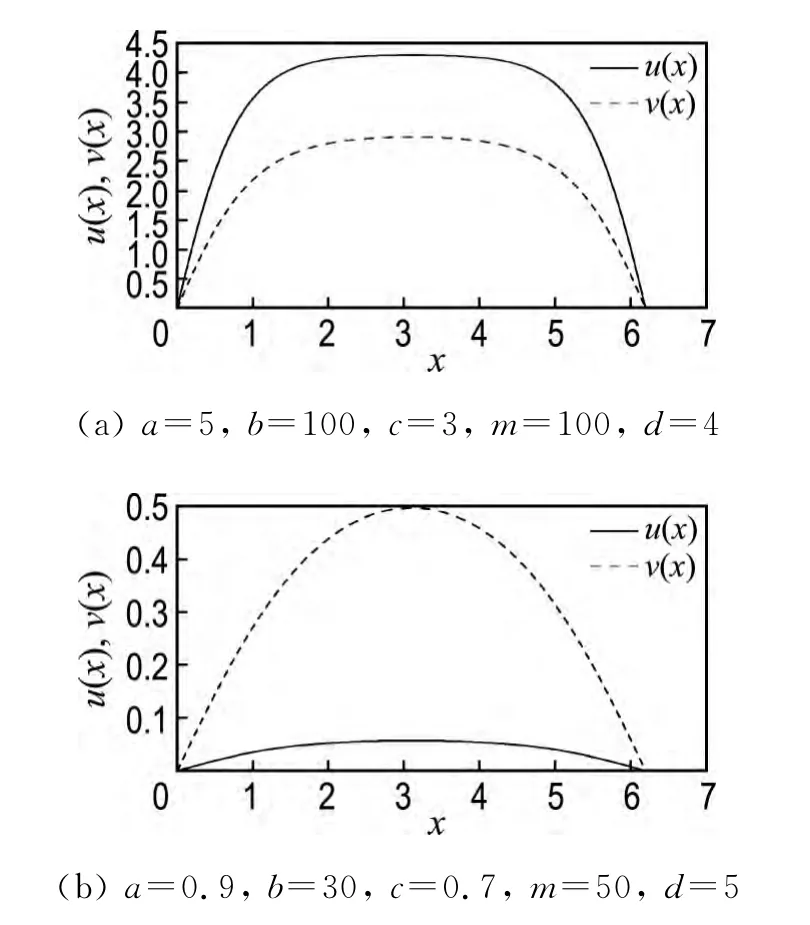
圖1 平衡態正解模擬圖Fig.1 The simulation diagram of positive steady state solutions
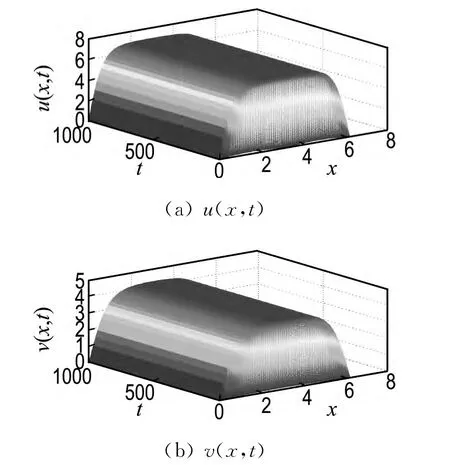
圖2 正解(u(x,t),v(x,t))模擬圖Fig.2 The simulation diagram of positive solution(u(x,t),v(x,t))

圖3 正解(u(x,t),v(x,t))對初值依賴性模擬圖Fig.3 The simulation diagram of the dependence of positive solutions on the initial values
5 結 語
本文討論了一類帶有HollingⅢ型功能反應函數的競爭模型正解的性質.利用不動點指標理論、擾動理論和分歧理論得到了正解的存在性、唯一性、穩定性和多重性.結果表明,當參數滿足一定條件時,系統存在穩定的共存態.通過全局分歧理論考察系統(3)關于(θa,0)處產生全局分支走向時,帶有HollingⅢ型功能反應函數競爭模型的全局分支沿著分歧參數c延伸到∞,這是與帶有HollingⅡ型功能反應函數競爭模型的不同之處.
[1] Dancer E N.On the indices of fixed points of mappings in cones and applications[J].Journal of Mathematical Analysis and Applications,1983,91(1):131-151.
[2] Nguyen A,Costa-Lima B.Orbits in a stochastic Goodwin-Lotka-Volterra model [J].Journal of Mathematical Analysis and Applications,2014,419(1):48-67.
[3] Pao C V.Dynamics of Lotka-Volterra cooperation systems governed by degenerate quasilinear reaction-diffusion equations [J].Nonlinear Analysis:Real World Applications,2015,23:47-60.
[4] Holling C S.The functional response of predators to prey density and its role in mimicry and population regulation [J].Memoirs of the Entomological Society of Canada,1965,97(45):1-60.
[5] DU Yi-hong,LOU Yuan.Some uniqueness and exact multiplicity results for a predator-prey model[J].Transactions of the American Mathematical Society,1997,349(6):2443-2475.
[6] WU Jian-hua.Global bifurcation of coexistence state for the competition model in the chemostat[J].Nonlinear Analysis,2000,39(7):817-835.
[7] Shabani S.Diffusive Holling type-II predator-prey system with harvesting of prey [J].Journal of Mathematical Analysis and Applications,2014,410(1):469-482.
[8] JIANG Hong-ling,WU Jian-hua,WANG Li-juan,etal.Qualitative analysis for a competition model with B-D functional response and numerical simulation [J].Numerical Methods for Partial Differential Equations,2014,30(5):1575-1594.
[9] ZHANG Xin-hong,LI Wen-xue,LIU Meng,etal.Dynamics of a stochastic Holling Ⅱone-predator two-prey system with jumps [J].Physica A:Statistical Mechanics and Its Applications,2015,421(1):571-582.
[10] ZHANG Cong,HUANG Nan-jing,O′Regan D.Almost periodic solutions for a Volterra model with mutual interference and Holling type Ⅲfunctional response [J].Applied Mathematics and Computation,2013,225(1):503-511.
[11] HUANG Ji-cai,RUAN Shi-gui,SONG Jing.Bifurcations in a predator-prey system of Leslie type with generalized Holling typeⅢfunctional response[J].Journal of Differential Equations,2014,257(6):1721-1752.
[12] YANG Rui-zhi,WEI Jun-jie.Stability and bifurcation analysis of a diffusive prey-predator system in Holling type Ⅲwith a prey refuge[J].Nonlinear Dynamics,2015,79(1):631-646.
[13] Crandall M G,Rabinowitz P H.Bifurcation from simple eigenvalue [J].Journal of Functional Analysis,1971,8(2):321-340.
[14] Rabinowitz P H.Some global results for nonlinear eigenvalue problems [J].Journal of Functional Analysis,1971,7(3):487-513.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19