基于多源信息和粒子群優(yōu)化算法的下肢運(yùn)動(dòng)模式識(shí)別
2015-03-19 01:57:17劉磊劉作軍
浙江大學(xué)學(xué)報(bào)(工學(xué)版) 2015年3期
劉磊,楊 鵬,2,劉作軍,2
(1.河北工業(yè)大學(xué) 控制科學(xué)與工程學(xué)院,天津300130;
2.智能康復(fù)裝置與檢測(cè)技術(shù)教育部工程研究中心,天津300130)
近年來(lái),由于意外傷害和疾病導(dǎo)致的截肢患者日益增多,已成為亟需關(guān)注的特殊社會(huì)群體[1-2].智能人體運(yùn)動(dòng)輔助系統(tǒng)可以替代所失去肢體的部分功能,使截肢者恢復(fù)一定的生活自理和工作能力.人體下肢運(yùn)動(dòng)模式識(shí)別技術(shù)是智能人體運(yùn)動(dòng)輔助系統(tǒng)研究中的一個(gè)重要研究方向.
從國(guó)內(nèi)外現(xiàn)有的研究成果來(lái)看,根據(jù)研究重點(diǎn)的不同,運(yùn)動(dòng)模式識(shí)別方法主要有3種.1)利用下肢表面肌電信號(hào)來(lái)識(shí)別下肢運(yùn)動(dòng)模式.表面肌電信號(hào)(surface electromyography,sEMG)是肌電信號(hào)在人體皮膚表面的募集,它能提供準(zhǔn)確豐富的運(yùn)動(dòng)信息,因此,研究人員選其作為下肢運(yùn)動(dòng)模式的信號(hào)源.Abel等[3]經(jīng)過(guò)研究提取肌電信號(hào)特征值,利用神經(jīng)網(wǎng)絡(luò)對(duì)人體動(dòng)作進(jìn)行模式識(shí)別.傳統(tǒng)的BP神經(jīng)網(wǎng)絡(luò)分類(lèi)容易出現(xiàn)局部最小值導(dǎo)致識(shí)別率較低.佘青山等[4]提取肌電信號(hào)特征值,采用二叉樹(shù)組合策略構(gòu)造基于多核學(xué)習(xí)的多類(lèi)分類(lèi)器識(shí)別水平行走時(shí)的支撐前期、支撐中期、支撐末期、擺動(dòng)前期、擺動(dòng)末期.吳劍鋒等[5]將人體下肢動(dòng)作分解為不同片段,以下肢表面肌電信號(hào)為信息源,利用簡(jiǎn)約支持向量機(jī)的方法識(shí)別了4個(gè)日常下肢動(dòng)作.He等[6]利用sEMG有效地識(shí)別截肢者平地行走、上下樓梯等運(yùn)動(dòng)模式,Du等[7]在其基礎(chǔ)上加入行走環(huán)境的先驗(yàn)信息,實(shí)現(xiàn)步態(tài)識(shí)別.2)在分析人體的結(jié)構(gòu)和運(yùn)動(dòng)力學(xué)基礎(chǔ)上,建立人體下肢運(yùn)動(dòng)數(shù)學(xué)模型來(lái)識(shí)別動(dòng)作.人體下肢運(yùn)動(dòng)涉及肌肉和神經(jīng)多個(gè)變量因素,各個(gè)因素之間相互影響、相互作用,這就為建立人體下肢運(yùn)動(dòng)數(shù)學(xué)模型帶來(lái)了困難.3)利用安裝在身體上的傳感器間接獲取運(yùn)動(dòng)信息來(lái)識(shí)別運(yùn)動(dòng)模式.Stolze等[8]在步態(tài)識(shí)別研究中利用足底壓力信息,并取得一定的成果.Milica[9]利用加速度傳感器計(jì)算出膝關(guān)節(jié)和大腿的角度信息,再結(jié)合腳尖和腳跟的足底壓力對(duì)下肢運(yùn)動(dòng)步態(tài)進(jìn)行識(shí)別.Lau等[10]使用加速度傳感器和陀螺儀對(duì)人體行走時(shí)的步態(tài)進(jìn)行分析.Oscar等[11]采用加速度信號(hào)和生命體征信號(hào)對(duì)跑步、上樓等5個(gè)動(dòng)作應(yīng)用多層感知器等方法進(jìn)行分類(lèi).
人體下肢運(yùn)動(dòng)包含不同的運(yùn)動(dòng)模式,如行走、跑步、上樓和下樓等,是一個(gè)變化復(fù)雜的過(guò)程,需要利用多種運(yùn)動(dòng)力學(xué)信息才能綜合表述,才可以提高下肢多運(yùn)動(dòng)模式識(shí)別的準(zhǔn)確度.上述算法存在人體下肢運(yùn)動(dòng)特征無(wú)法準(zhǔn)確描述的問(wèn)題.為了克服上述方法的不足,本文針對(duì)平地行走、上下樓梯、上下坡等多種運(yùn)動(dòng)模式,通過(guò)對(duì)下肢表面肌電信號(hào)、髖關(guān)節(jié)角度、加速度等多源信息的獲取和處理,結(jié)合粒子群優(yōu)化算法(PSO)的全局尋優(yōu)能力和誤差反向傳播(BP)神經(jīng)網(wǎng)絡(luò)的局部搜索優(yōu)勢(shì),利用PSO-BP算法[12]對(duì)5種運(yùn)動(dòng)模式進(jìn)行識(shí)別.
1 系統(tǒng)描述
為了提高人體下肢運(yùn)動(dòng)信息獲取的全面性,建立下肢多源信息采集系統(tǒng),主要包括3方面信息:下肢表面肌電信號(hào)、髖關(guān)節(jié)角度、加速度信號(hào).
1.1 下肢表面肌電信號(hào)
sEMG 是從皮膚表面通過(guò)電極引導(dǎo)記錄的肌肉自主收縮或電誘發(fā)收縮(M波)過(guò)程中產(chǎn)生的生理電變化.人體不同的動(dòng)作在sEMG上的表現(xiàn)差別很大.研究表明,下肢肌電信號(hào)體現(xiàn)了患者下肢運(yùn)動(dòng)的預(yù)測(cè)性[13].下肢任何一個(gè)簡(jiǎn)單的動(dòng)作,都需要多塊肌肉的協(xié)同作用.由于與下肢運(yùn)動(dòng)相關(guān)的肌肉很多,選取合適的肌肉群非常關(guān)鍵,比較各個(gè)肌肉在不同運(yùn)動(dòng)模式下肌電信號(hào)變化趨勢(shì),最終選取4塊大腿肌肉的表面肌電信號(hào)作為研究對(duì)象,分別是:股直肌、股內(nèi)側(cè)肌、半腱肌、長(zhǎng)收肌.這4塊肌肉在信號(hào)區(qū)分度上有典型性[4-5].肌肉解剖圖如圖1、2所示.股直肌、股內(nèi)側(cè)肌是膝關(guān)節(jié)強(qiáng)有力的伸肌,股直肌可以屈曲髖關(guān)節(jié);半腱肌主要作用是伸髖屈膝,以及膝關(guān)節(jié)的外旋;長(zhǎng)收肌為大腿肌內(nèi)側(cè)群的組成部分,主要作用是內(nèi)收、外旋、微屈髖關(guān)節(jié).
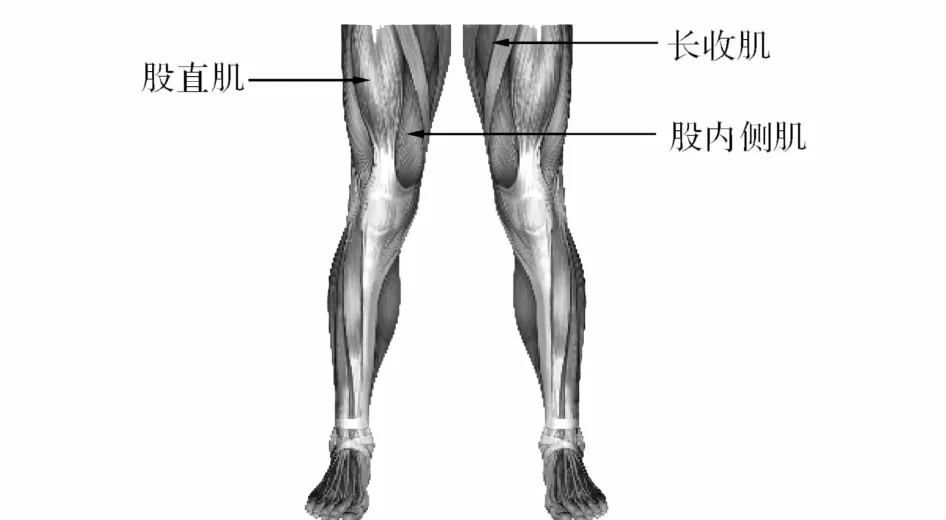
圖1 股直肌、長(zhǎng)收肌、股內(nèi)側(cè)肌示意圖Fig.1 Rectus muscle,long adductor and medial vastus muscle
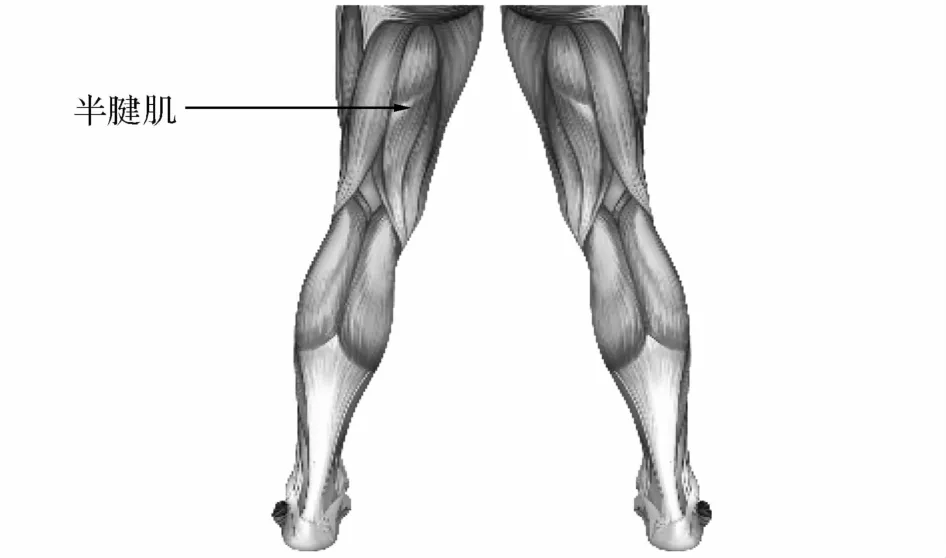
圖2 半腱肌示意圖Fig.2 Semitendinosus muscle
1.2 髖關(guān)節(jié)角度信號(hào)
人行走時(shí)的髖關(guān)節(jié)角速度是描述下肢運(yùn)動(dòng)的物理量.人體處于運(yùn)動(dòng)狀態(tài)時(shí),其下肢會(huì)產(chǎn)生周期性的角度變化.對(duì)于平地行走,上樓梯或上斜坡等不同運(yùn)動(dòng),一個(gè)周期內(nèi)大腿的擺動(dòng)角度往往存在差異.因此,本課題利用陀螺儀傳感器測(cè)出步態(tài)周期內(nèi)髖關(guān)節(jié)角速度的變化,對(duì)其進(jìn)行積分可得髖關(guān)節(jié)角度,進(jìn)一步分析可以判斷下肢運(yùn)動(dòng)模式.
1.3 髖關(guān)節(jié)加速度信號(hào)
加速度信號(hào)是描述下肢運(yùn)動(dòng)狀態(tài)的重要信息.不同的步速、路況會(huì)對(duì)應(yīng)不同的加速度,加速度的大小也反映了加速力的大小,該信息直觀可靠、物理意義明確.利用加速度傳感器對(duì)運(yùn)動(dòng)信息進(jìn)行采集,提取加速度信號(hào)的關(guān)鍵特征,從而判斷運(yùn)動(dòng)模式.
2 特征提取與融合
為了準(zhǔn)確地識(shí)別人體下肢運(yùn)動(dòng)模式,特征提取和融合是模式識(shí)別的關(guān)鍵,特征提取和融合的好壞直接影響到識(shí)別率的高低.
2.1 下肢表面肌電信號(hào)特征提取
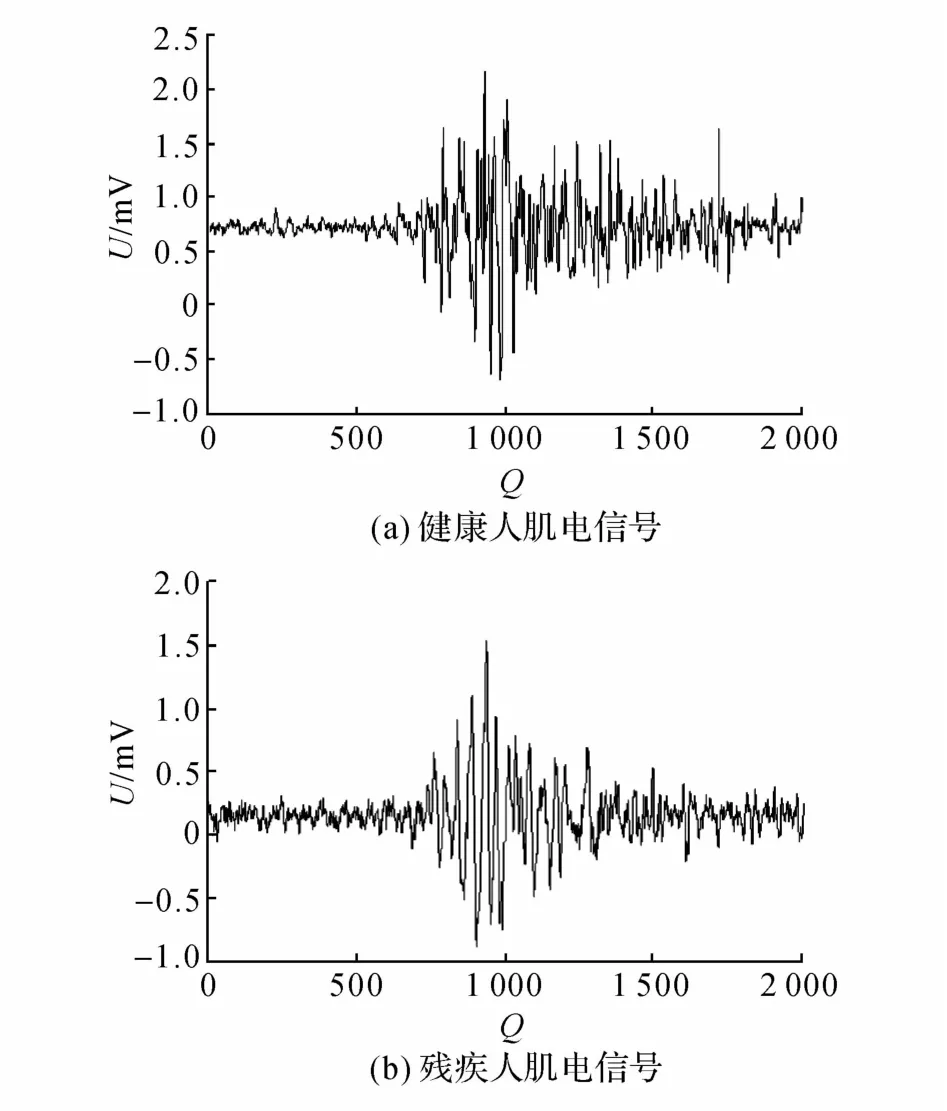
圖3 健康人和殘疾人的肌電信號(hào)對(duì)比圖Fig.3 EMG signal contrast of healthy people and disabled people
圖3為健康人和殘疾人穿戴假肢時(shí)的股直肌在相同運(yùn)動(dòng)模式下的肌電信號(hào),橫坐標(biāo)Q表示采樣點(diǎn)數(shù).不難看出,兩者在相同動(dòng)作下肌電信號(hào)的變化趨勢(shì)大體相似.但由于殘疾人的肌肉有一定程度的萎縮,其肌電信號(hào)的幅值較健康人稍弱.考慮到肌電信號(hào)應(yīng)用之前需要對(duì)不同人的信號(hào)進(jìn)行歸一化處理,這種幅值上的差異對(duì)下肢運(yùn)動(dòng)模式識(shí)別的影響可以忽略.單一特征描述肌電信號(hào)往往是不全面的,采用時(shí)頻特征結(jié)合的方法提取下肢表面肌電信號(hào)特征值.研究表明:在短時(shí)間間隔中,肌電信號(hào)可以看成平穩(wěn)信號(hào)來(lái)處理,肌電信號(hào)幅值和能量大小可以表征肌電信號(hào)的特點(diǎn),但缺少細(xì)節(jié)特征的描述.表面肌電信號(hào)的時(shí)域特征偏度(η)和峭度(μ)可以很好地描繪細(xì)節(jié)變化,定義如下:

式中:χ(ti)為肌電信號(hào)序列值,N為肌電信號(hào)離散化后序列總和,為肌電信號(hào)數(shù)學(xué)期望,為肌電信號(hào)的方差.當(dāng)受試者動(dòng)作劇烈時(shí),時(shí)域信號(hào)有較大偏差,為了準(zhǔn)確識(shí)別運(yùn)動(dòng)模式需要借助頻域特征.實(shí)驗(yàn)表明,同一實(shí)驗(yàn)者不同時(shí)間同一運(yùn)動(dòng)模式的功率譜也有一定區(qū)別.本研究選用肌電信號(hào)功率譜比值作為肌電信號(hào)頻域特征,這種方法對(duì)提取非特定人肌電信號(hào)特征非常有意義.
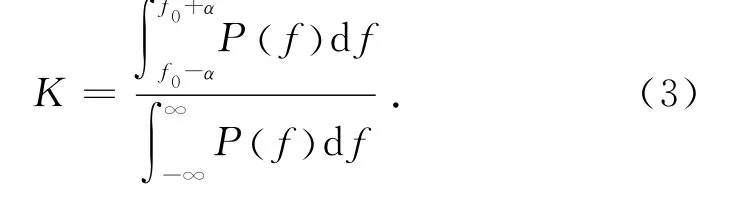
式中:K為肌電信號(hào)功率譜比值,P(f)為功率譜密度函數(shù),f0為功率譜最大值處的頻率,α為積分范圍.f0可通過(guò)方程dP(f)/d(f)=0求解,如有多個(gè)解,取P(f)為最大值時(shí)的f0.王喜太等[14]研究表明,當(dāng)α=15 Hz時(shí),特征值可以很好地區(qū)分.由于肌電信號(hào)絕大多數(shù)頻譜集中在50~500 Hz,為了消除低頻和高頻干擾信號(hào),僅對(duì)50~500 Hz頻段積分.
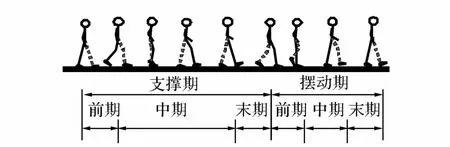
圖4 人體行走步態(tài)周期Fig.4 Human walking gait cycle
2.2 髖關(guān)節(jié)角度特征提取
一個(gè)完整的步態(tài)從腳跟著地開(kāi)始到同側(cè)腳跟再次著地截止,分為支撐期(stance phase)和擺動(dòng)期(swing phase),其中支撐期占60%,擺動(dòng)期占40%,如圖4所示.陀螺儀可以用來(lái)測(cè)量以(°)/s為單位的角速度,對(duì)其進(jìn)行積分可得髖關(guān)節(jié)角度.圖5給出了健康人5種運(yùn)動(dòng)模式的髖關(guān)節(jié)角度信號(hào).圖6是殘疾人穿戴假肢平地行走時(shí)髖關(guān)節(jié)矢狀面角度比較圖.其中,ψ為步態(tài)周期百分比.不難看出,健肢側(cè)與殘肢側(cè)的髖關(guān)節(jié)在矢狀面方向的角度差異不是很大,但是殘肢側(cè)的髖關(guān)節(jié)擺動(dòng)幅度比健肢側(cè)的幅度小一些.研究表明:在不同運(yùn)動(dòng)模式下殘疾人的步態(tài)周期為1.5~2.5 s.為了更好地表征髖關(guān)節(jié)角度的特征信息,可以將支撐期細(xì)分為支撐前期、支撐中期、支撐末期;擺動(dòng)期細(xì)分為擺動(dòng)前期、擺動(dòng)中期、擺動(dòng)末期.
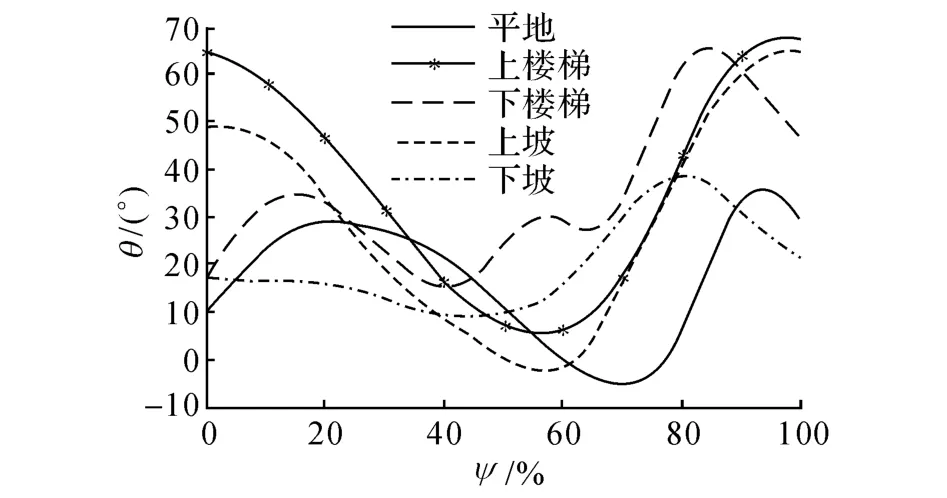
圖5 5種運(yùn)動(dòng)模式髖關(guān)節(jié)角度信號(hào)Fig.5 Five kinds of locomotion mode hip angle signal
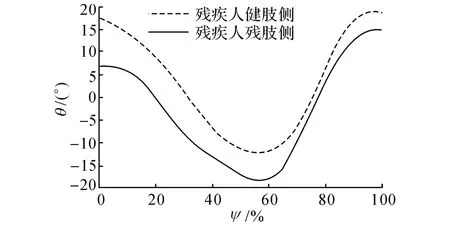
圖6 殘疾人髖關(guān)節(jié)健肢側(cè)與殘肢側(cè)角度比較Fig.6 Comparison of angles of hip between sound limb and residual limb of disabled people
在提取髖關(guān)節(jié)角度特征時(shí),首先求出在各運(yùn)動(dòng)模式下對(duì)應(yīng)的支撐期和擺動(dòng)期的角度均值θ,然后分別求出在各運(yùn)動(dòng)細(xì)分模式下對(duì)應(yīng)角度均值θ1,最后以?xún)烧咔蟊戎底鳛樘卣髦?
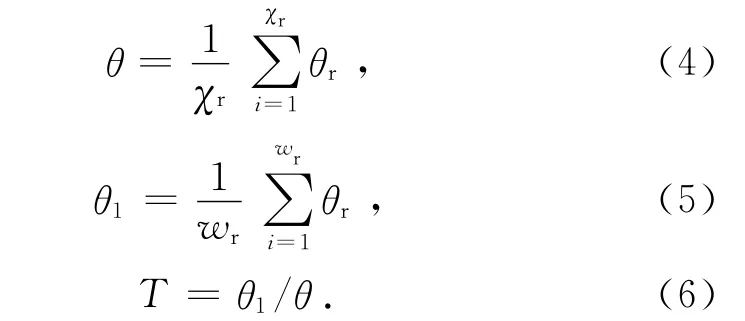
式中:θr為采樣區(qū)間內(nèi)髖關(guān)節(jié)角度值,χr為對(duì)應(yīng)時(shí)期的采樣點(diǎn)數(shù),wr為細(xì)分運(yùn)動(dòng)模式下的采樣點(diǎn)數(shù).
2.3 髖關(guān)節(jié)加速度特征提取
人體行走和上下樓梯時(shí)髖關(guān)節(jié)的加速度不同,加速度也是表征下肢運(yùn)動(dòng)模式的重要信息.圖7~10給出了健康人和殘疾人不同運(yùn)動(dòng)模式下加速度信號(hào).對(duì)每位受試者每種模式運(yùn)動(dòng)各100次進(jìn)行分析后,定義了運(yùn)動(dòng)能量,表達(dá)式為
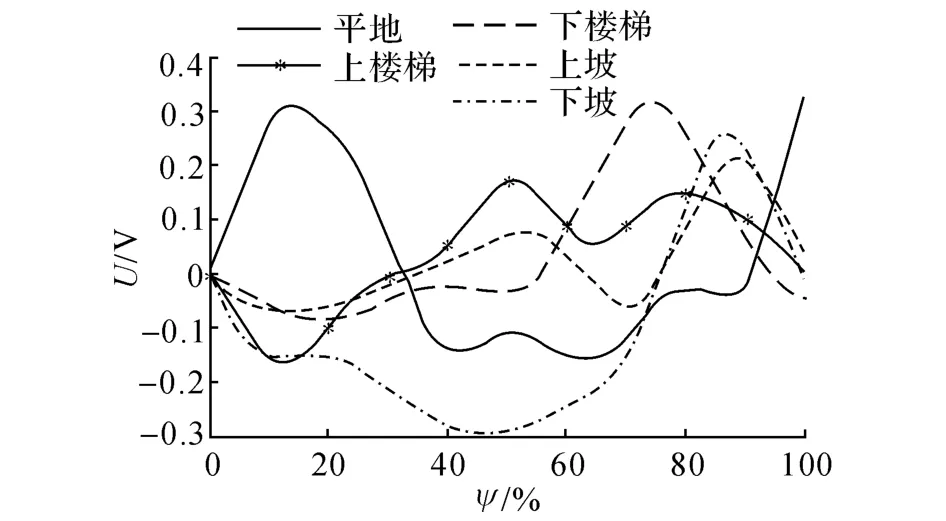
圖7 健康人5種運(yùn)動(dòng)模式下的髖關(guān)節(jié)加速度X軸電壓信號(hào)Fig.7 Voltage signals of X axis acceleration of hip of healthy people under five kinds of locomotion modes
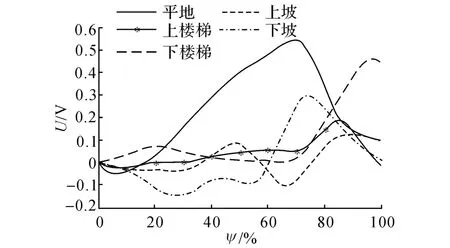
圖8 健康人5種運(yùn)動(dòng)模式下的髖關(guān)節(jié)加速度Y軸電壓信號(hào)Fig.8 Voltage signals of Y axis acceleration of hip of healthy people under five kinds of locomotion modes
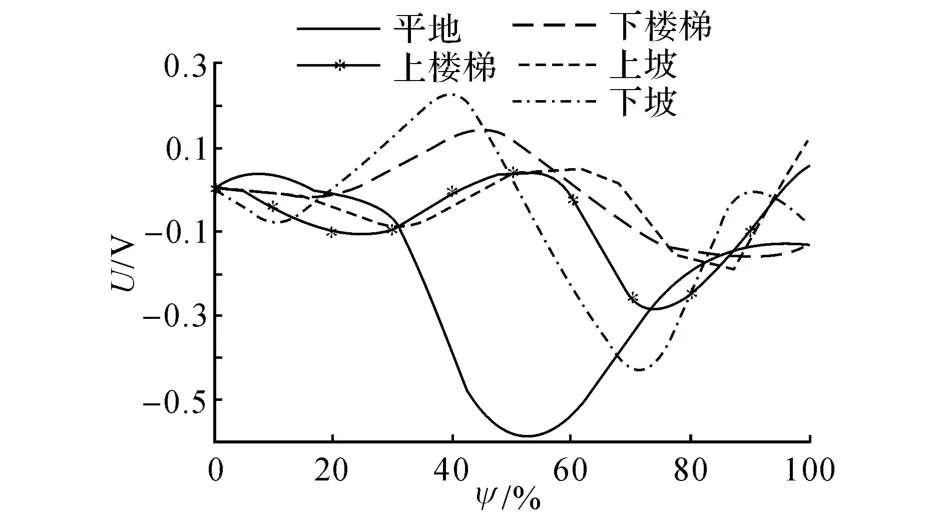
圖9 殘疾人5種運(yùn)動(dòng)模式下的髖關(guān)節(jié)加速度X軸電壓信號(hào)Fig.9 Voltage signals of X axis acceleration of hip of disabled people under five kinds of locomotion modes
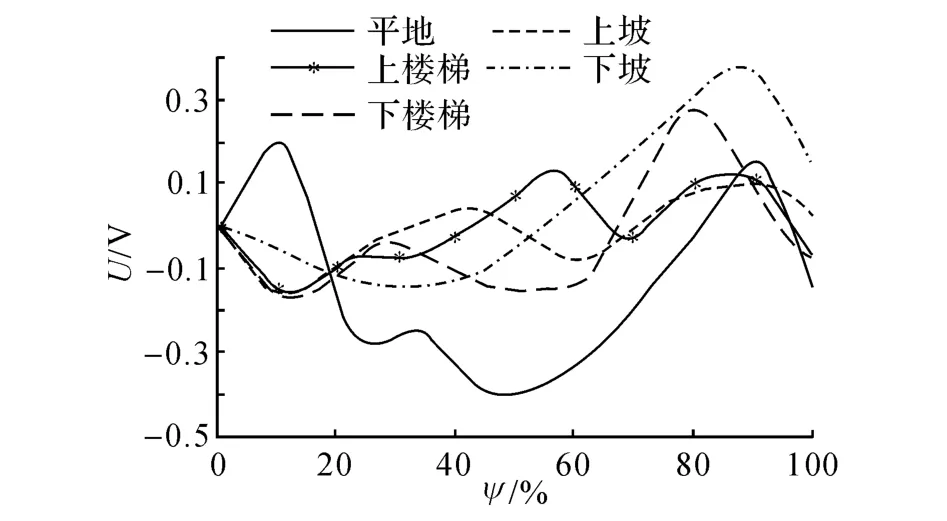
圖10 殘疾人5種運(yùn)動(dòng)模式下的髖關(guān)節(jié)加速度Y軸電壓信號(hào)Fig.10 Voltage signals of Y axis acceleration of hip of disabled people under fire kinds of locomotion modes

式中:aχi、a yi為加速度傳感器χ軸、y軸分量,gχ、g y分別為重力加速度g在傳感器χ、y軸分量,L為單周期信號(hào)長(zhǎng)度.在不同運(yùn)動(dòng)模式下,加速度能量峰值有較大差異,可以作為加速度特征值.加速度χ軸與y軸相關(guān)性,χ、y軸標(biāo)準(zhǔn)差為另外3個(gè)特征值.
2.4 多源信息融合
特征值過(guò)多會(huì)使分類(lèi)器訓(xùn)練時(shí)間長(zhǎng),人們希望在進(jìn)行定量分析的過(guò)程中涉及的特征值較少,而得到的信息量又不會(huì)減少[15].特征值融合可以減少冗余數(shù)據(jù).主成分分析的基本思想是用較少的變量代替原來(lái)的變量,而新變量是原來(lái)變量的某種組合[16-17].該方法在多傳感器信息融合應(yīng)用廣泛.設(shè)不同運(yùn)動(dòng)模式下d個(gè)樣本共有p維特征值,融合算法如下:
1)為了消除量綱影響和特征值大小的影響,將樣本變換為平均值為0,方差為1的標(biāo)準(zhǔn)化數(shù)據(jù),得到以下標(biāo)準(zhǔn)化矩陣:

4)求第j個(gè)主成分的貢獻(xiàn)率:

5)選取前m個(gè)主成分,使得這些主成分的貢獻(xiàn)率滿(mǎn)足
6)求前m個(gè)主成分作為融合后的特征值:
3 PSO-BP算法
PSO算法具有全局隨機(jī)搜索最優(yōu)解和梯度下降局部細(xì)致搜索的特點(diǎn),并且具有較快的收斂速度[18-19].本文采用PSO算法來(lái)優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的權(quán)值閾值.該算法基于群體迭代,群體在解空間中追隨最優(yōu)粒子進(jìn)行搜索.在PSO算法中,每個(gè)個(gè)體為一個(gè)粒子,每個(gè)粒子代表一個(gè)潛在的解.在每次迭代過(guò)程中,粒子通過(guò)個(gè)體極值(pbest)和群體極值(gbest)更新自身的速度和位置,即

式中:v o為粒子的速度;χo為粒子當(dāng)前位置,o表示迭代次數(shù);c1、c2為學(xué)習(xí)因子,學(xué)習(xí)因子使粒子具有向群體中優(yōu)秀個(gè)體學(xué)習(xí)的能力;r1、r2為0~1.0的獨(dú)立隨機(jī)數(shù);w為慣性因子,反映粒子在運(yùn)動(dòng)中受慣性的影響,

其中,wmax、wmin分別為最大和最小慣性因子,ηmax為最大迭代數(shù),η為當(dāng)前迭代數(shù).
在PSO-BP算法中,粒子群的位置χo表示BP網(wǎng)絡(luò)的所有權(quán)值和閾值.粒子優(yōu)化的適應(yīng)度函數(shù)為

式中:Z為訓(xùn)練集數(shù)目,C為神經(jīng)網(wǎng)絡(luò)輸出神經(jīng)元數(shù)目,分別為第Λ個(gè)樣本的第H個(gè)網(wǎng)絡(luò)輸出節(jié)點(diǎn)的理想輸出和實(shí)際輸出.
PSO-BP算法的基本流程如下:
1)初始化BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值;
2)設(shè)置粒子群參數(shù),包括種群規(guī)模、迭代次數(shù)、慣性因子最大值、最小值等;
3)初始化所有粒子的速度和位置;
4)計(jì)算樣本中每個(gè)粒子對(duì)應(yīng)的適應(yīng)度值;
5)如果該粒子的當(dāng)前適應(yīng)度函數(shù)值優(yōu)于pbest對(duì)應(yīng)的適應(yīng)度值,則更新pbest;
6)如果該粒子的歷史最優(yōu)值優(yōu)于gbest對(duì)應(yīng)的適應(yīng)度值,則更新gbest;
7)根據(jù)式(9)和(10)更新每個(gè)粒子的速度和位置;
8)迭代次數(shù)加1,檢查是否符合結(jié)束條件,如果達(dá)到最大迭代次數(shù)或達(dá)到最小誤差要求,則終止迭代,否則跳轉(zhuǎn)至步驟4);
9)用步驟8)輸出的權(quán)值和閾值對(duì)BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練.
4 人體下肢運(yùn)動(dòng)模式識(shí)別實(shí)驗(yàn)
4.1 實(shí)驗(yàn)對(duì)象、實(shí)驗(yàn)平臺(tái)
人體下肢的動(dòng)作包含多種運(yùn)動(dòng)模式,本研究主要包括平地行走、上坡、下坡、上樓梯和下樓梯動(dòng)作.在實(shí)驗(yàn)過(guò)程中,為避免性別及年齡因素對(duì)傳感器信號(hào)造成影響,本研究選擇3位研究生(S1、S2、S3)和1位安裝假肢的小腿截肢患者 (S4)作為受試者.為確保實(shí)驗(yàn)數(shù)據(jù)的客觀性,3位研究生無(wú)任何下肢關(guān)節(jié)損傷,無(wú)肌肉骨骼病史,實(shí)驗(yàn)期間身體狀況良好,實(shí)驗(yàn)前沒(méi)有進(jìn)行任何形式的劇烈運(yùn)動(dòng),基本資料(年齡、身高、體重、步長(zhǎng)、腿長(zhǎng))如表1所示.
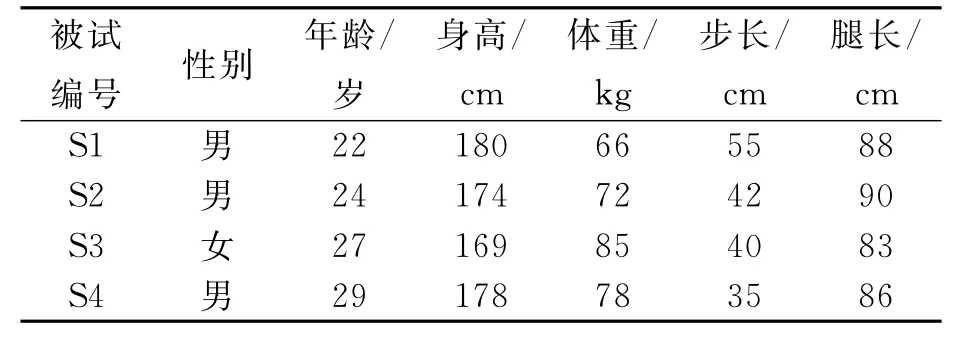
表1 受試者基本資料Tab.1 Basic data of subjects
實(shí)驗(yàn)中,選用美國(guó)Delsys公司生產(chǎn)的Trigno無(wú)線EMG傳感器,EMG傳感器帶有一個(gè)嵌入的兩軸加速度計(jì),采樣頻率為1 k Hz.該儀器可以同時(shí)采集四路表面肌電信號(hào),采集到的肌電信號(hào)和加速度信號(hào)通過(guò)無(wú)線網(wǎng)絡(luò)傳輸?shù)诫娔X.陀螺儀傳感器選用村田公司的壓電振動(dòng)陀螺儀傳感器ENC-03,數(shù)據(jù)采集卡選用加拿大Quanser公司的QPID數(shù)據(jù)采集卡,通過(guò)采集卡采集到電腦,采樣頻率1 k Hz.為最大限度的采集肌電信號(hào),首先對(duì)選取的下肢肌肉使用異丙醇?jí)|擦拭皮膚表面的油質(zhì)和殘留,然后使用Delsys膠黏劑傳感器接口將傳感器放到皮膚上.受試者首先完成平地行走、上坡、下坡、上樓、下樓5個(gè)動(dòng)作5次,這5次為熟悉性操作,隨后每位受試者在不同運(yùn)動(dòng)模式分別采集200組數(shù)據(jù),共1 000組數(shù)據(jù).按60%、20%和20%的比例將4位受試者的實(shí)測(cè)樣本數(shù)據(jù)分為訓(xùn)練樣本、校驗(yàn)樣本和測(cè)試樣本.平地行走在跑步機(jī)上完成,設(shè)定跑步機(jī)速度為3 km/h,上下樓梯、上下坡實(shí)驗(yàn)在一個(gè)由6臺(tái)階、3.5 m長(zhǎng)、坡度為15°的斜坡上完成.為避免行走速度影響實(shí)驗(yàn)結(jié)果,受試者上下樓梯、上下坡均以正常速度進(jìn)行針對(duì)所要研究的5種運(yùn)動(dòng)模式,搭建上下樓梯、上下坡、平地行走實(shí)驗(yàn)平臺(tái),實(shí)驗(yàn)平臺(tái)由梯梯、斜坡及平面板組成,如圖11(a)所示.圖11(b)為下肢多源信息采集系統(tǒng).
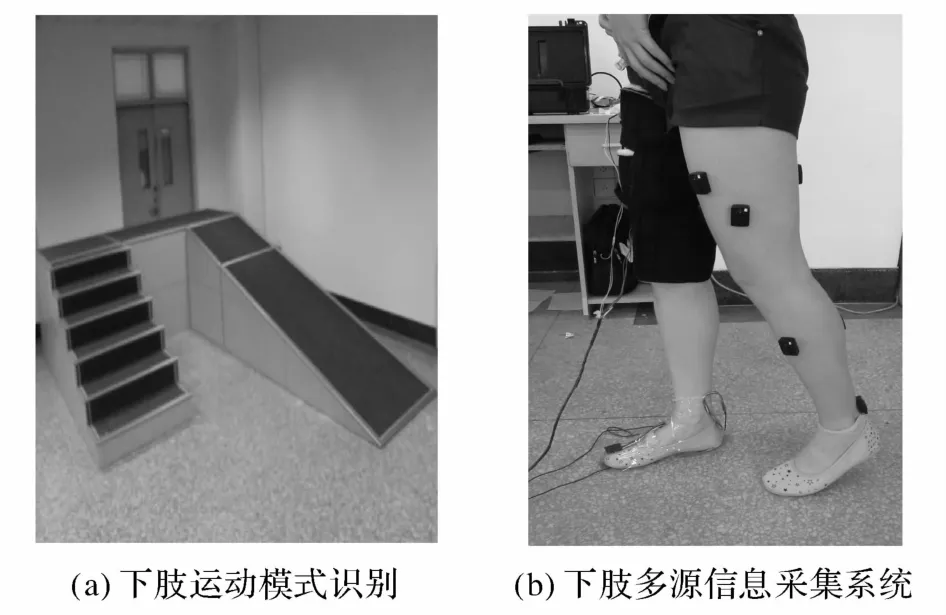
圖11 下肢運(yùn)動(dòng)模式識(shí)別實(shí)驗(yàn)平臺(tái)及多源信息采集系統(tǒng)Fig.11 Lower limb locomotion mode identification experimental platform and multi-source information measurement system
4.2 特征提取與融合實(shí)驗(yàn)分析
使用Matlab工具進(jìn)行仿真,每個(gè)樣本按2.1~2.3節(jié)方法進(jìn)行特征提取,每個(gè)樣本特征值為6+4+12=22維,通過(guò)主成分分析融合算法對(duì)特征值融合.表2給出了主成分分析表,不難看出,前8個(gè)主成分的累計(jì)貢獻(xiàn)率已達(dá)到87.998%,累計(jì)貢獻(xiàn)率為0.85的主成分基本包含了全部特征值的信息,可以概括原始特征值,利用式(8)求得前8個(gè)主成分作為融合后的特征值.
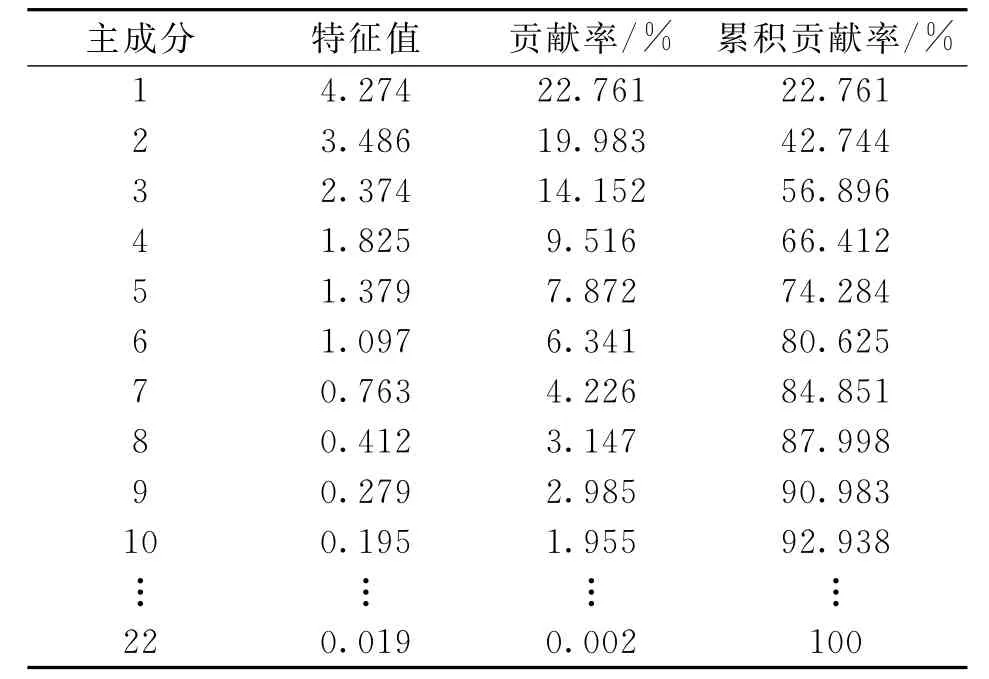
表2 主成分的貢獻(xiàn)率和累積貢獻(xiàn)率Tab.2 Principal component contribution rate and cumulative contribution rate
4.3 BP網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)
BP神經(jīng)網(wǎng)絡(luò)輸入節(jié)點(diǎn)數(shù)目為8,輸入層與隱含層之間采用S型函數(shù),隱含層與輸出層之間采用S型函數(shù).待識(shí)別的運(yùn)動(dòng)模式一共有5種,為提高BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練效率,輸出層的神經(jīng)元節(jié)點(diǎn)數(shù)設(shè)置為3,分別用[0,0,1]、[0,1,0]、[1,0,0]、[1,0,1]、[0,1,1]5種不同的輸出結(jié)果表示平地行走、上樓、下樓、上坡、下坡.由于神經(jīng)元的激勵(lì)函數(shù)選用的是S型函數(shù),期望輸出為0或1可能導(dǎo)致算法不收斂,本文算法中用0.1代表0,用0.9代表1.隱藏層的神經(jīng)元節(jié)點(diǎn)數(shù)的選擇根據(jù)參考公式確定.Michael[20]認(rèn)為當(dāng)l>q時(shí),隱藏層的神經(jīng)元節(jié)點(diǎn)數(shù)取表示樣本的輸入節(jié)點(diǎn)數(shù),q表示樣本的輸出節(jié)點(diǎn)數(shù).本文中隱藏層節(jié)點(diǎn)數(shù)是.因此,BP神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)為8—5—3.
4.4 PSO優(yōu)化BP神經(jīng)網(wǎng)絡(luò)
BP網(wǎng)絡(luò)初始權(quán)值有8×5+5×3=55個(gè),初始閾值有5+3=8個(gè).粒子的維數(shù)是55+8=63維.粒子群參數(shù)設(shè)置如下:粒子種群數(shù)目為40;c1=c2=2;r1、r2∈ (0,1.0);wmax=0.9,wmin=0.4.粒子在63維空間中對(duì)BP網(wǎng)絡(luò)權(quán)值閾值尋優(yōu),然后采用BP算法訓(xùn)練經(jīng)過(guò)粒子群尋優(yōu)的權(quán)值和閾值.PSO優(yōu)化BP神經(jīng)網(wǎng)絡(luò)算法用第3章的方法編程.
4.5 實(shí)驗(yàn)結(jié)果
利用實(shí)驗(yàn)數(shù)據(jù)對(duì)相同結(jié)構(gòu)的PSO-BP神經(jīng)網(wǎng)絡(luò)和BP網(wǎng)絡(luò)進(jìn)行訓(xùn)練,設(shè)置網(wǎng)絡(luò)訓(xùn)練最大迭代次數(shù)為2 000,誤差目標(biāo)為10-5,n為訓(xùn)練次數(shù),ε為均方誤差.網(wǎng)絡(luò)訓(xùn)練時(shí)的收斂曲線分別如圖12、13所示,比較結(jié)果見(jiàn)表3.PSO-BP網(wǎng)絡(luò)收斂速度和精度優(yōu)于BP網(wǎng)絡(luò).因此,選用PSO-BP網(wǎng)絡(luò)對(duì)運(yùn)動(dòng)模式進(jìn)行識(shí)別.

圖12 BP網(wǎng)絡(luò)訓(xùn)練誤差曲線Fig.12 BP network training error curve
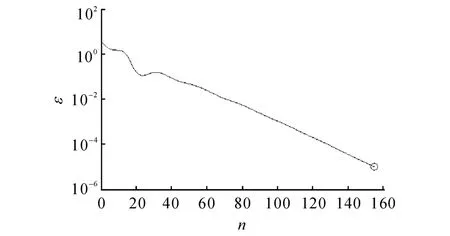
圖13 PSO-BP網(wǎng)絡(luò)訓(xùn)練誤差曲線Fig.13 PSO-BP network training error curve

表3 BP和PSO-BP算法訓(xùn)練結(jié)果比較Tab.3 Comparison of training results between BP and PSOBP algorithms___________________________
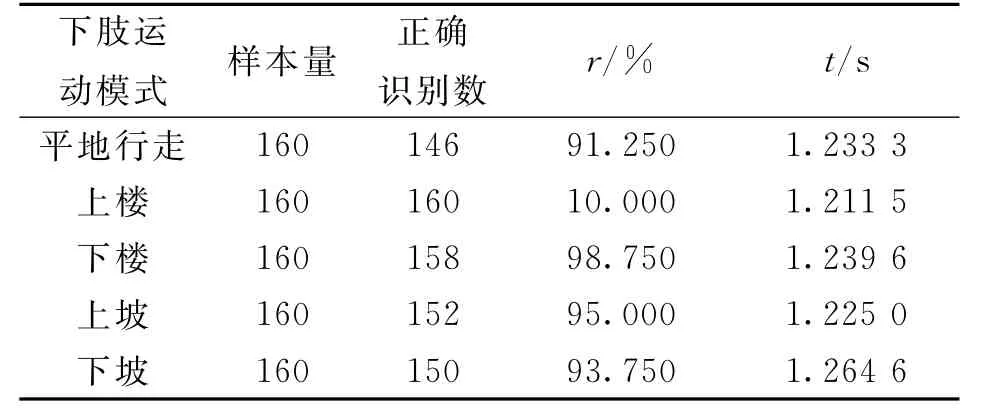
表4 受試者下肢運(yùn)動(dòng)模式識(shí)別正確率Tab.4 Lower limb locomotion-mode recognition accuracy
將PSO-BP訓(xùn)練好的網(wǎng)絡(luò)保存后,作為測(cè)試數(shù)據(jù)識(shí)別的工具.表4給出了下肢運(yùn)動(dòng)模式識(shí)別率r及每種運(yùn)動(dòng)模式的平均識(shí)別時(shí)間t.每種運(yùn)動(dòng)模式的平均識(shí)別時(shí)間小于殘疾人的步態(tài)周期,表明本文提出的識(shí)別方法有較好的實(shí)時(shí)性.在測(cè)試的200×4組數(shù)據(jù)中,共有766組被正確地識(shí)別出來(lái).實(shí)驗(yàn)結(jié)果表明,受試者的平地行走、上坡、下坡、上樓、下樓5種運(yùn)動(dòng)模式的識(shí)別率分別達(dá)到98.13%、100.00%、98.75%、95.00%及93.75%,平均識(shí)別率為95.75%.本文方法與單獨(dú)利用肌電信號(hào)的步態(tài)識(shí)別[21]和單獨(dú)利用腿部運(yùn)動(dòng)信息的步態(tài)識(shí)別[22-23]方法相比具有更高的識(shí)別率.其中,上坡、下坡、平地行走運(yùn)動(dòng)模式識(shí)別出錯(cuò)較多,原因是相似動(dòng)作之間的混淆分類(lèi).實(shí)驗(yàn)使用的實(shí)驗(yàn)平臺(tái)是依照建筑無(wú)障礙通道的15°坡度,斜坡坡度較低,上、下坡運(yùn)動(dòng)模式與平地行走模式的數(shù)據(jù)較相似,造成部分樣本的誤識(shí)別.
5 結(jié) 語(yǔ)
為了提高人體下肢動(dòng)作模式識(shí)別率,利用加速度傳感器、陀螺儀傳感器、肌電信號(hào)傳感器搭建人體下肢多源信息采集系統(tǒng).提取這3種信號(hào)的特征,并將此進(jìn)行多源信息融合,結(jié)合PSO算法和BP神經(jīng)網(wǎng)絡(luò)提出一種新的下肢運(yùn)動(dòng)模式識(shí)別方法.實(shí)驗(yàn)結(jié)果表明:該算法能正確地識(shí)別下肢運(yùn)動(dòng)模式,豐富了人體下肢運(yùn)動(dòng)識(shí)別的方法,為人體下肢智能輔助設(shè)備的研發(fā)提供了理論基礎(chǔ),但是該方法距離實(shí)用性還有一定的差距.基于PC機(jī)的多源信息采集系統(tǒng)比較龐大,下一步工作的重點(diǎn)是開(kāi)發(fā)出一套小型化嵌入式信號(hào)獲取系統(tǒng),以便于信號(hào)的采集與識(shí)別.
(
):
[1]楊鵬,劉作軍,耿艷利,等.智能下肢假肢關(guān)鍵技術(shù)研究進(jìn)展[J].河北工業(yè)大學(xué)學(xué)報(bào),2013,42(1):76- 80.YANG Peng,LIU Zuo-jun,GENG Yan-li,et al.Research advance on key technology of intelligent lower limb prosthesis[J].Journal of Hebei University of Technology,2013,42(1):76- 80.
[2]FRANK S,HUSEYIN A V,MICHAEL G.Upslope walking with a powered knee and ankle prosthesis:initial results with an amputee subject[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2011,19(1):71- 79.
[3]ABEL E W,ZACHARIA P C,F(xiàn)ORSTER A,et al.Neural network analysis of the EMG interference pattern[J].Medical Engineer and Physics,1996,18(1):12- 17.
[4]佘青山,孟 明,羅志增,等.基于多核學(xué)習(xí)的下肢肌電信號(hào)動(dòng)作識(shí)別[J].浙江大學(xué)學(xué)報(bào):工學(xué)版,2010,44(7):1292- 1297.SHE Qing-shan,MENG Ming,LUO Zhi-zeng,et al.Electromyography movement recognition of lower limb based on multiple kernel learning[J].Journal of Zhejiang University:Engineering Science,2010,44(7):1292- 1297.
[5]吳劍鋒,吳 群,孫守遷,等.簡(jiǎn)約支持向量機(jī)分類(lèi)算法在下肢動(dòng)作識(shí)別中的應(yīng)用研究[J].中國(guó)機(jī)械工程,2011,22(4):433- 438.WU Jian-feng,WU Qun,SUN Shou-qian.Research on classification algorithm of reduced support vector machine for low limb movement recognition[J].Chinese Journal of Mechanical,2011,22(4):433- 438.
[6]HE H,TODD A K,ROBERT D L.A strategy for identifying locomotion modes using surface electromyography[J].IEEE Transactions on Biomedical Engineering,2009,56(1):65- 73.
[7]DU L,ZHANG F,LIU M,et al.Toward design of an environment-aware adaptive locomotion-mode-recognition system [J].IEEE Transactions on Biomedical Engineering,2012,59(10):2716- 2726.
[8]STOLZE H,KUHTZ-BUSCHBECK J P,MONDWURF C,et al.Retest reliability of spatiotemporal gait parameters in children and adults [J].Gait and Posture,1998,7(2):125- 130.
[9]MILICA D.Automatic recognition of gait phases from accelerations of leg segments[C]∥ 9th Symposium on Neural Network Applications in Electrical Engineering.Belgrade:[s.n.],2008:121- 124.
[10]LAU H,TONG K.The reliability of using accelerometer and gyroscope for gait event identification on persons with dropped foot[J].Gait and Posture,2008,27(2):248- 257.
[11]OSCAR D,ALFREDO J,MIGUEL A,et al.Centinela:a human activity recognition system based on acceleration and vital sign data[J].Pervasive and Mobile Computing,2012,8(5):717- 729.
[12]李柞泳,汪嘉楊,郭淳.PSO算法優(yōu)化BP網(wǎng)絡(luò)的新方法及仿真實(shí)驗(yàn)[J].電子學(xué)報(bào),2008,36(11):2224- 2228.LI Zuo-yong,WANG Jia-yang,GUO Chun.A new method of BP network optimized based on particle swarm optimization and simulation test[J].Acta Electronica Sinica,2008,36(11):2224- 2228.
[13]HA K H,VAROL H A,GOLDFARB M.Volitional control of a prosthetic knee using surface electromyography[J].IEEE Transactions on Biomedical Engineering,2011,58(1):144- 151.
[14]王喜太,王強(qiáng),張曉玉,等.基于肌電傳感器的下肢殘肢康復(fù)訓(xùn)練模式識(shí)別的研究[J].中國(guó)康復(fù)理論與實(shí)踐,2009,15(1):90- 92.WANG Xi-tai, WANG Qiang,ZHANG Xiao-yu,et al.Pattern recognition in rehabilitative exercises of lower residual limbs based on electromyography sensor[J].Chinese Journal of Rehabilitation Theory and Practise,2009,15(1):90- 92.
[15]鮑必賽,樓曉俊,李雋穎.主成分分析在震動(dòng)信號(hào)目標(biāo)識(shí)別算法中的應(yīng)用[J].華中科技大學(xué)學(xué)報(bào):自然科學(xué)版,2012,40(7):24- 28.BAO Bi-sai,LOU Xiao-jun,LI Jun-ying.Application of principal component analysis in target recognition algorithm of seismic signals[J].Joarnal of Huazhong University of Science and Technology:Natural Science Edition,2012,40(7):24- 28.
[16]董九英.多傳感器數(shù)據(jù)融合的主成分方法研究[J].計(jì)算機(jī)工程與應(yīng)用,2009,45(33):111- 113.DONG Jiu-ying.Study on principle component method for multi-sensor data fusion[J].Computer Engineering and Applications,2009,45(33):111- 113.
[17]石欣,雷璐寧,熊慶宇.基于二次特征提取與SVM的異常步態(tài)識(shí)別[J].儀器儀表學(xué)報(bào),2011,32(3):673- 677.SHI Xin,LEI Lu-ning,XIONG Qing-yu.Abnormal gait recognition based on quadratic feature extraction and support vector machine[J].Chinese Journal of Scientific Instrument,2011,32(3):673- 677.
[18]羅勇,和小娟.基于組合特征和PSO-BP算法的數(shù)字識(shí)別[J].信息與控制,2011,40(3):375- 380.LUO Yong,HE Xiao-juan.Digital recognition based on combined feature and PSO-BP algorithm[J].Information and Control,2011,32(3):673- 677.
[19]KENNEDY J,EBERHART R.Particle swarm optimization[C]∥Proceedings of the IEEE International Conference on Neural Networks.Piscatawav:IEEE,1995:1942- 1948.
[20]MICHAEL W R.Survey of neural network technology for automatic target recognition[J].IEEE Transactions Neural Networks,1990,1(1):28- 43.
[21]刑秀玉,劉鴻宇,黃武.基于加速度的小波能量特征及樣本熵組合的步態(tài)分類(lèi)算法[J].傳感技術(shù)學(xué)報(bào),2013,26(4):545- 549.XING Xiu-yu,LIU Hong-yu,HUANG Wu.Gait pattern classification with wavelet energy and sample entropy based on acceleration signals[J].Chinese Journal of Sensors and Actuators,2013,26(4):545- 549.
[22]茍斌,劉作軍,趙麗娜.基于相關(guān)性分析的下肢假肢步行模式預(yù)識(shí)別方法研究[J].東南大學(xué)學(xué)報(bào):自然科學(xué)版,2013,43(S1):192- 196.Gou Bin,Liu Zuo-jun,Zhao Li-na.Walking mode prejudgment of lower limb prosthesis based on correlation analysis[J].Journal of Southeast University:Natural Science Edition,2013,43(S1):192- 196.
[23]YANG Peng,CHEN Ling-ling,GUO Xin,et al.Artificial lower limb with myoelectrical control based on support vector machine[C]∥ Proceedings of the 6th World Congress on Intelligent Control and Automation.Dalian:[s.n.],2006:9486- 9489.
