基于ERDAS LPS模塊航空正射影像的制作
2015-03-16 09:14:16林小紅
西北水電 2015年3期
林小紅
(甘肅省水利水電勘測設計研究院,蘭州 730000)
文章編號:1006—2610(2015)03—0018—04
基于ERDAS LPS模塊航空正射影像的制作
林小紅
(甘肅省水利水電勘測設計研究院,蘭州 730000)
目前制作數(shù)字正射影像的主要方法有全數(shù)字攝影測量工作站,以及ERDAS、DP Grid、PixelGrid、ARCGIS等遙感與地理信息系統(tǒng)軟件制作。其中REDAS LPS模塊采用流水式的制作過程,整個過程緊湊,連續(xù)性好,精度高。文章以甘谷風電場山區(qū)測圖工作為例,介紹應用LPS模塊在工程中進行快速數(shù)字正射影像制作的過程。相對PixelGrid軟件在精度和效率方面都具有更好的表現(xiàn)。
ERDAS;LPS;正射影像;航空影像;DTM
0 前 言
通常在實地測繪工作中用線畫圖表示實際的地物地貌顯示效果,單調(diào)且不十分直觀,而航空影像或衛(wèi)星影像能夠真實、客觀地反映地表面的一切景物,保留地表的原始狀態(tài),具有十分豐富的信息。然而航空影像或衛(wèi)星影像通常并不是與地表面保持相似的、簡單的縮小,而是中心投影或其他投影構(gòu)像。因此,這樣的影像存在由于影像傾斜和地形起伏等引起的變形[1-2]。數(shù)字正射影像圖(Digital Orthophoto Map,DOM)是以航攝像片或遙感影像(單色/彩色)為基礎,經(jīng)掃描處理并經(jīng)逐像元進行輻射改正、微分糾正和鑲嵌,按地形圖范圍裁剪成的影像數(shù)據(jù),并將地形要素的信息以符號、線畫、注記、公里格網(wǎng)、圖廓(內(nèi)/外)整飾等形式添加到該影像平面上,形成以柵格數(shù)據(jù)形式存儲的影像數(shù)據(jù)庫。它具有地形圖的幾何精度和影像特征[3-4]。
1 ERDAS 2013 LPS簡介
ERDAS LPS(Leica Photogrammetry Suite)是美國ERDAS公司開發(fā)的數(shù)字攝影測量系統(tǒng),支持多種航天、航空幾何傳感器模型,支持數(shù)據(jù)輸入、傳感器模型設置、坐標系統(tǒng)定義、傳感器內(nèi)定向、影像自動匹配、區(qū)域網(wǎng)空三加密、數(shù)字地面模型(DTM)的自動提取和編輯、數(shù)字正射影像(DOM)生產(chǎn)、數(shù)字線劃圖(DLG)的采集、紋理提取、三維城市模型建立等數(shù)據(jù)生產(chǎn)。在高性能軟硬件的支持下, LPS 以嚴密的數(shù)字攝影測量理論為基礎,以流線型的數(shù)據(jù)生產(chǎn)流程為核心,以攝影測量的過程-流程為向?qū)В愿邤U展性的分布式處理為機制,是一種高效高精度空間數(shù)據(jù)生產(chǎn)的軟件[5]。LPS處理影像數(shù)據(jù)的特點是:① 流程化的處理方式提高了系統(tǒng)的完整性;② 點的自動量測和地形自動提取;③ 子像素立體顯示和點位分配;④ 公認并被證實的空中三角測量;⑤ 詳盡的精度報告、優(yōu)秀的數(shù)據(jù)精度檢測方法等。
ERDAS公司于2001年并入瑞士徠卡測量系統(tǒng)。因其先進的影像處理技術(shù),友好、靈活的用戶界面和操作方式。目前已經(jīng)在國內(nèi)農(nóng)林業(yè)、水利水電行業(yè)、測繪行業(yè)、環(huán)保系統(tǒng)、氣象系統(tǒng)、各大院校以及科研單位有著廣泛的應用。
2 甘谷風電場正射影像圖的制作過程
2.1 數(shù)據(jù)的準備
(1) 制作正射影像區(qū)域的數(shù)碼航片;
(2) 攝影相機參數(shù)、測區(qū)的外方位元素;
(3) 測區(qū)投影參數(shù)以及測區(qū)屬性。
本文使用LPS 在無控制點時高精度正射糾正影像的功能。因為提供了初始的GPS 信息,所以不需要量測控制點。此外,由于數(shù)碼相機的圖像沒有內(nèi)部基準點,因此內(nèi)定向是自動完成的。所獲得的影像數(shù)據(jù)由NIKON D800相機拍攝,像幅為7360×4912 pixel,像素4.88 μm。
我們將以無人機獲取的甘谷北部山區(qū)的影像數(shù)據(jù)來制作整個工程前期服務的正射影像圖[6]。為了給工程前期的設計提供更直觀的資料,需要對所獲得的影像數(shù)據(jù)進行快速的正射影像制作。給前期的設計和踏勘提供更好的支持。
2.2 正射影像圖的制作過程
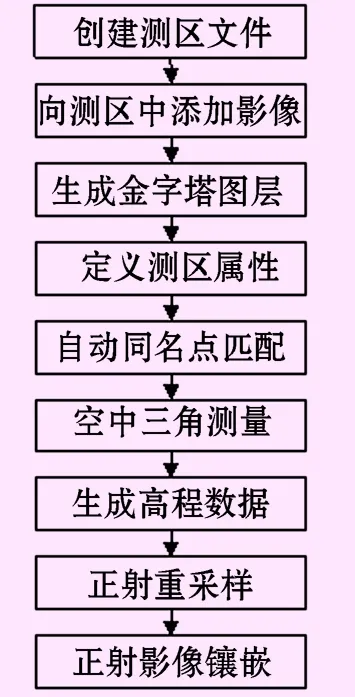
圖1 數(shù)字相機數(shù)據(jù)處理流程圖
數(shù)據(jù)處理流程見圖1。下面對制作過程進行詳細說明。
(1) 創(chuàng)建工程并設置相關(guān)參數(shù)
首先在LPS中創(chuàng)建工程文件,工程文件下有整個測區(qū)的所有影像、攝影機參數(shù)、地面控制點坐標以及其他相關(guān)信息。接著導入pos數(shù)據(jù)設置外方位元素,載入要糾正的圖像并進行影像金字塔(Pyra- mid Layers)的計算。
(2) 定義數(shù)碼相機的參數(shù)
本測區(qū)影像由NIKON D800數(shù)碼相機拍攝,外方位元素信息已經(jīng)自動加載,設置相機內(nèi)方位參數(shù)如圖2,設置相機外方位參數(shù)如圖3。
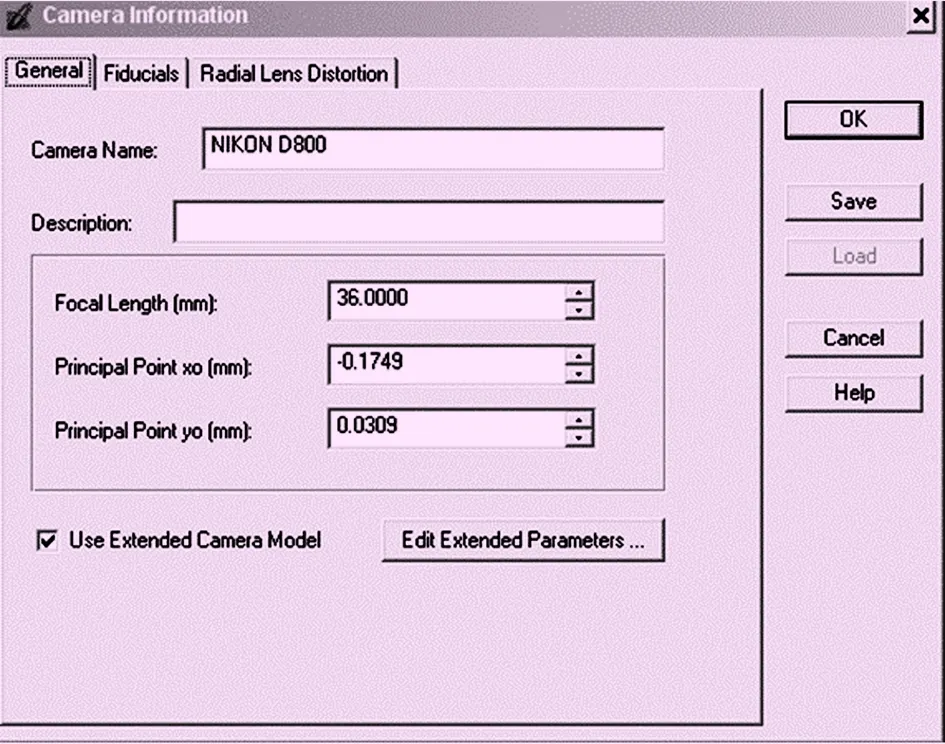
圖2 選擇相機及內(nèi)方位元素圖
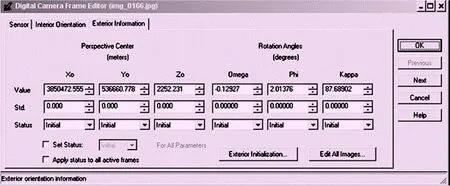
圖3 外方位元素圖
(3) 自動量測同名地物點
通常,在自動同名點匹配之前,要在測區(qū)范圍內(nèi)量測控制點來確定外定向參數(shù),但是這個數(shù)據(jù)包含GPS和INS信息等初始外方位元素,因此不需要采集控制點就可以進行外定向。在這里選擇二維窗口的量測(Classic Point Measurement Tool)如圖4。

圖4 同名點量測圖
(4) 進行空中三角測量
完成以上各步驟后就可以進行空中三角測量,計算出點的三維坐標。在運行命令前要進行相關(guān)參數(shù)的設置,如圖5空中三角測量精度設置所示,設置好后便可以執(zhí)行航空三角測量,得到各地物點的三維坐標,運行后得到如圖6空中三角測量殘差所示的Triangulation Summary對話框,其中顯示的Total Image Unit-Weight RMSE的值小于1(表明誤差在1 mm左右,相當于1/4個像素的大小)便可以接受。
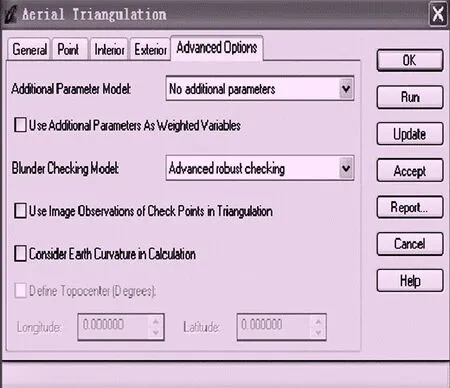
圖5 空中三角測量精度設置圖

圖6 空中三角測量殘差界面圖
(5)自動提取DEM及正射重采樣
在LPS中選擇eATE模塊進行提取,在提取的過程中同時進行分類拼接,如圖7,在處理過程中或輸出文件后移除其他類。分類提取出各個像對所構(gòu)成的點云數(shù)據(jù),由點云數(shù)據(jù)生成DEM,如圖8。eATE模塊所提取的DEM數(shù)據(jù)更加細致。
(6) 正射影像的鑲嵌和拼接
采用ERDAS的專業(yè)鑲嵌工具mosaic來完成,首先調(diào)入糾正后的影像,自動生成拼接線。接著進行色彩糾正處理。最后進行鑲嵌預覽,如果效果好,可以進行下一步,否則需要調(diào)整拼接線和顏色校正參數(shù)[7-8]。確定沒有問題,選擇輸出路徑和文件名稱,運行鑲嵌處理。最終效果DOM如圖9。最終生成的正射影像可以導入到ArcGIS中進行初步的圖上設計,在工程后期生成DLG后與DOM進行套合生成帶有等高線的DOM圖。為設計和施工階段提供更好的服務。
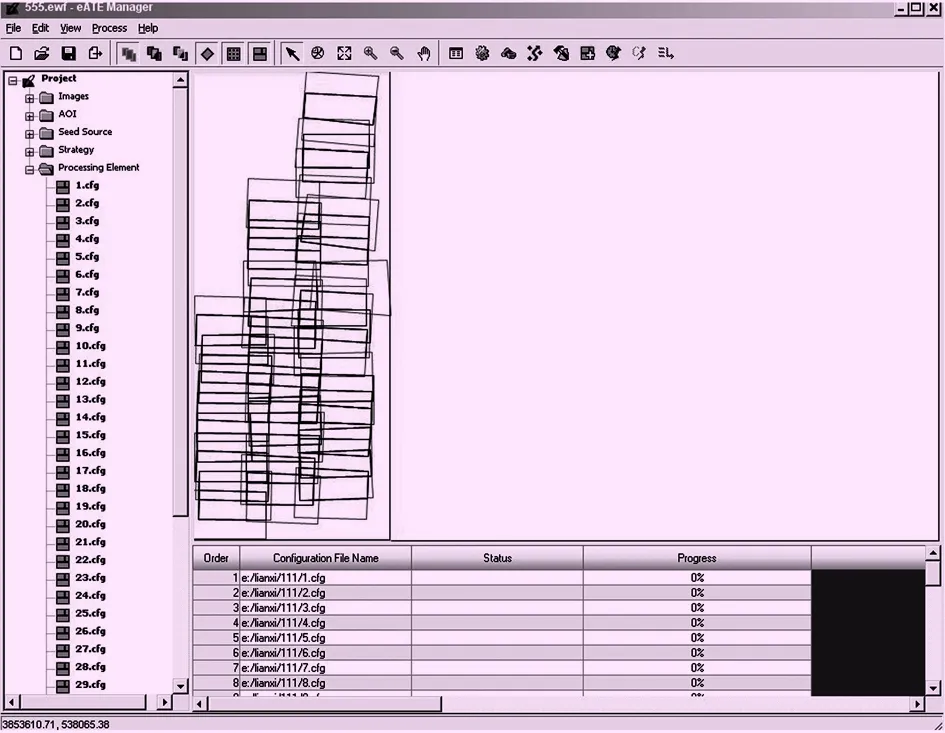
圖7 測區(qū) DEM拼接圖
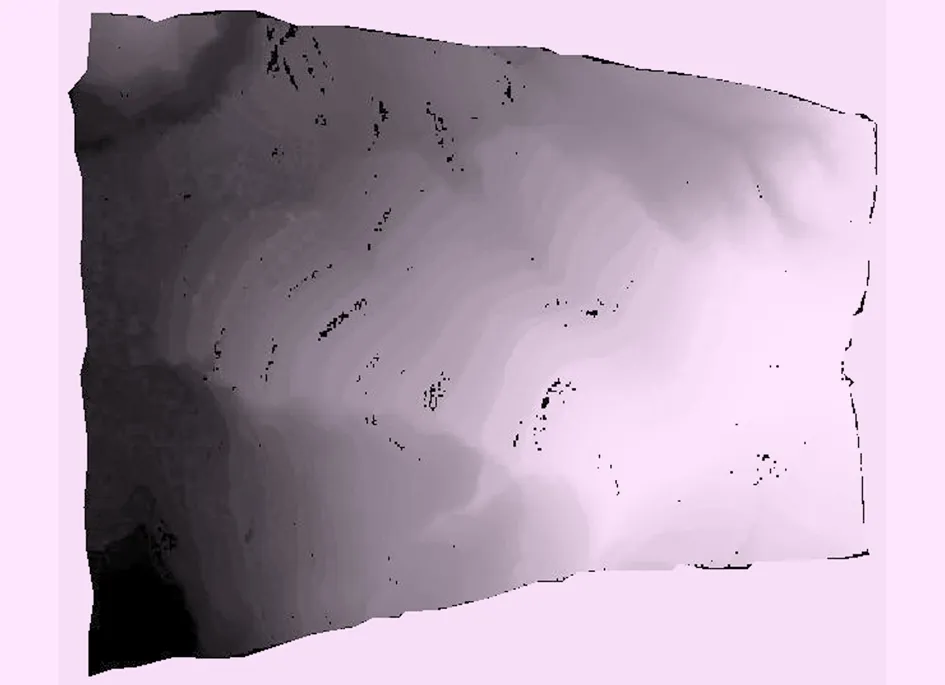
圖8 生成的DEM圖
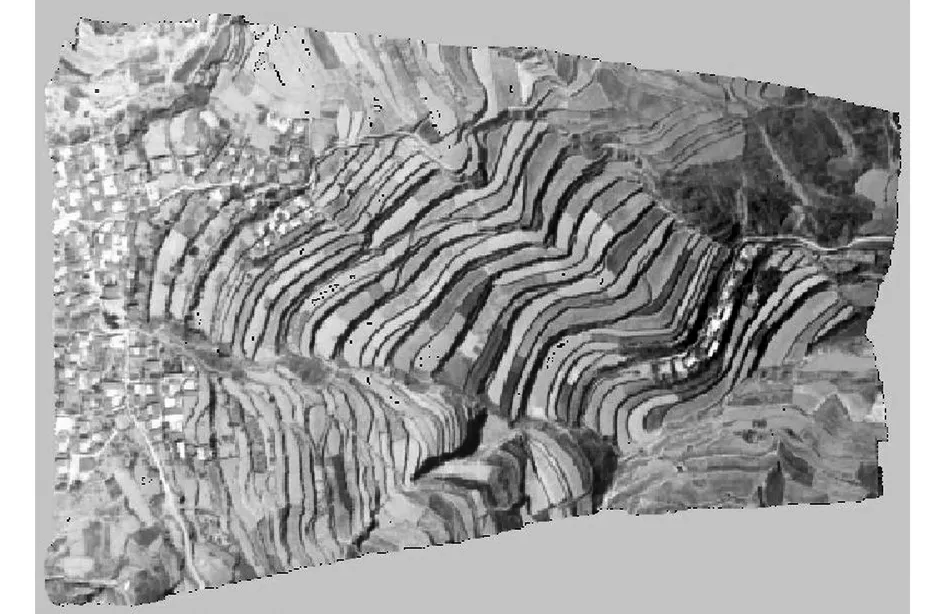
圖9 最終生成的DOM圖
3 制作過程中應該注意的問題
(1) 自動量測同名點時應該檢查連接點的質(zhì)量以及分布的情況。如果點位分布不均,可以再次生成更多的連接點,直到合格為止[4]。對于不能自動生成連接點的影像需要手工加點,在重疊區(qū)域選擇道路交叉口、拐角處或田埂的拐角等明顯的地物點。
(2) 拼接過程中拼接線要盡量選擇次要地物多的地方,避開主要地物,如高大的建筑物等。
4 與 PixelGrid軟件操作的特點對比
Pixel Grid軟件是中國測繪科學研究院研制的一款多源航空航天遙感數(shù)據(jù)集群分布式處理系統(tǒng)。其低空無人機數(shù)據(jù)模塊主要用于低空飛行器航空影像的攝影測量系統(tǒng),能夠完成低空航空攝影和無人機影像數(shù)據(jù)從預處理、影像畸變差改正、自動空中三角測量、DSM/DEM的生成、正攝影像的糾正、勻光勻色及自動拼接的整個航攝數(shù)據(jù)處理流程。
ERDAS LPS與Pixel Grid軟件在為測區(qū)生成快速DOM的過程中,ERDAS LPS有如下特點。
(1) 快速高效
LPS的自動化數(shù)據(jù)處理流程,高效合理地進行數(shù)據(jù)生產(chǎn),能夠最大程度地節(jié)省人力。分布式的處理功能,充分利用整合硬件資源,極大地提高了數(shù)據(jù)的生產(chǎn)效率。
具體在使用Pixel Grid軟件快速制作測區(qū)正攝影像的過程中,創(chuàng)建測區(qū)時相片順序旋轉(zhuǎn)方向一定要設置正確,否則將導致后續(xù)的相對定向、模型連接等無法順利完成。在進行模型連接時可能由于影像質(zhì)量問題或者地形因素導致模型連接失敗,此時需要在失敗的模型連接像片上標準點位處增加3個以上連接點,且每個連接點至少要在3張像片上都有同名像位。在使用ERDAS LPS處理時不會存在這樣的問題,只要有測區(qū)的POS初始信息,軟件會自動完成拍片的工作。
(2) 精 度
數(shù)據(jù)處理成果的精度決定了其在行業(yè)應用中能否發(fā)揮最大的作用,對數(shù)據(jù)應用有至關(guān)重要的影響。LPS有高精度的自動點量測、空三模型算法以及地形提取算法。具體操作中LPS的同名點的匹配工作會自動完成并剔除粗差點。最后在生成DTM和DOM的過程中,LPS中可以將不同類別的地物賦予不同的參數(shù)值,能夠求得比較精確的DTM。Pixel Grid軟件在自動提取DTM中存在分類提取算法不夠精確,有較大偏差。ERDAS軟件在勻光、勻色以及影像的最終鑲嵌功能上也能夠自動化完成,且處理速度高于Pixel Grid軟件,在處理效果上色彩能夠統(tǒng)一,鑲嵌線選擇合理。
總之在為測區(qū)生成快速正攝影像的過程中,ERDAS LPS在無控制點的情況下能夠快速、自動生成最終正攝影像,并且可以保證精度。同等條件下其他軟件在運行速度、自動匹配同名點、以及正攝影像的鑲嵌等方面存在著需要過多的人工干預、色彩亮度不統(tǒng)一等問題。實踐中使用ERDAS LPS能夠高效、保證質(zhì)量的完成測區(qū)快速正攝影像的生成。
5 結(jié) 語
由于數(shù)字正射影像具有精度高、信息豐富、直觀逼真、現(xiàn)實性強等優(yōu)點。并且可作為背景控制信息評價其他數(shù)據(jù)的精度、現(xiàn)實性和完整性;可以從中提取自然和人文信息,能夠為地形圖的修測和更新提供良好的數(shù)據(jù)和更新手段。所以我們在這次甘谷山區(qū)的地形圖測圖工作中使用LPS模塊進行了快速的正射影像制作,為工程的設計提供了更加直觀的影像,為下一步設計打好了基礎。
[1] 王樹根.攝影測量原理與應用[M].武漢:武漢大學出版社,2009.
[2] 秦國民,戴榮. 基于GIS和DEM的流域特征信息提取——以吉太曲流域為例[J].西北水電,2010,(03):12-13,29.
[3] 李祖鋒,賀麗娟,張成增,周濤. 高角度信號遮擋區(qū)域GPS測量控制網(wǎng)精度控制[J].西北水電,2014,(01):27-31.
[4] 王佩軍,徐亞明.攝影測量學[M].武漢:武漢大學出版社,2005.
[5] ERDAS LPS 使用指南[M].北京:Leica Geosystems,2009.
[6] 黃文鈺,尚海興,張成增,巨天力,賀麗娟. 航空攝影測量新方法在風電場大比例尺成圖中的應用[J]. 西北水電,2014,(02):21-24.
[7] 賈維花,呂宜平,張之武.基于ERDAS 8.7 LPS模塊正射影像圖的制作[J].測繪與空間地理信息,2007,(07):39-05.
[8] 馮秀麗.基于ERDAS的遙感影像正射圖的制作[J].遙感技術(shù)與應用,2003,18(3):176-179.
Establishment of Aerial Orthoimage Based on ERDAS LPS Modules
LIN Xiao-hong
(Gansu Water Resources and Hydropower Investigation Design Research Institute, Lanzhou 730000,China)
The main methods for establishment of digital orthoimage currently include total digital photogrammetric station, ERDAS, DP Grid, PixelGrid, ARCGIS, etc. Among them, REDAS LPS modules establish image in a flow means. The whole course is compact, continuity is well and precision is high. With case of survey mapping of mountain area of Gangu wind farm, quick establishment of digital orthoimage processing by application of LPS modules is introduced. Compared with precision and efficiency of PixelGrid application, READAS LPS is with better performance.
ERDAS; LPS; orthoimage; aerial image; DTM
2015-01-20
林小紅 (1964- ),女,甘肅省天水市人,工程師,從事工程測量工作.
P208
A
10.3969/j.issn.1006-2610.2015.03.006
