INPHO軟件進行帶狀測區數碼影像的POS輔助空三加密方法探討
2015-03-16 11:34:42楊希
鐵道勘察 2015年2期
關鍵詞:模型
楊 希
(中鐵第四勘察設計院集團有限公司,湖北武漢 430063)
Discussion on the POS-Assisted Aerial Triangulation Method of Digital Images in Banded Area Based INPHO
YANG Xi
INPHO軟件進行帶狀測區數碼影像的POS輔助空三加密方法探討
楊希
(中鐵第四勘察設計院集團有限公司,湖北武漢430063)
Discussion on the POS-Assisted Aerial Triangulation Method of Digital Images in Banded Area Based INPHO
YANG Xi
摘要以含POS信息的帶狀測區數碼影像為數據源,對應用INPHO軟件進行空三加密的流程和方法進行探討。通過多測段數據的POS輔助空三加密處理,從數碼影像預處理、外控點量測順序、加密點預量測、模型連接點精度檢查及調整和POS數據的有效引入等方面進行實驗研究,總結出相應的處理流程和方法技巧,快速高效地完成空三加密處理,并有效保證空三加密的精度。
關鍵詞空三加密POS數據數碼影像INPHO軟件
空三加密是攝影測量內業測圖和數字產品生成的第一道工序,其核心內容是以相片上的像點坐標為依據,用攝影測量的方法解求測區中所有影像的外方位元素,并基于攝影過程的幾何反轉,重建可量測的幾何立體模型,然后解求出地面點的空間坐標[1,2]。POS機載定位定向系統是基于全球導航衛星定位系統GNSS和慣性導航測量裝置IMU直接測定影像外方位元素的現代航空攝影導航系統[1],由GNSS定位技術獲取航攝儀的位置參數,由IMU測定其姿態參數,通過差分技術聯合平差解算后,獲得攝影時各影像的外方位元素,實現無地面控制或僅有少量地面控制點的地面定位[4-8]。當前的攝影測量系統已逐步實現全數字攝影測量的處理模式,即將POS信息輔助到攝影測量處理中,利用模式識別技術和影像匹配等技術,輔以少量的人工交互控制,實現半自動/全自動的空三加密。
INPHO是由德國測繪學家Ackermann教授創立和研發的數字攝影測量系統,用于空三加密處理的模塊為MATCH-AT,該模塊采用光束法區域網平差模型進行平差解算,其自動匹配技術精度高[3,10],在POS信息的輔助下可有效實現模型連接點的自動匹配和初步定位。
以武漢至襄陽、十堰鐵路帶狀測區的部分數碼影像數據為例,使用INPHO軟件進行帶狀測區數碼影像POS輔助空三加密處理,探討和研究空三加密的方法和技巧。
1INPHO軟件數碼影像的POS輔助空三加密流程
資料準備:包括數碼影像及其相機文件,POS數據(各影像的初始外方位元素:X,Y,Z,Omega,Phi,Kappa),外業控制點數據及其點之記。
創建工程:主要包括輸入相機文件參數、數碼影像、POS數據、外業控制點數據、測區航帶strip建立等。
相機參數的像平面坐標系統設置將直接影響航線連接,當航線影像連接不正確時,應在此處修改航線方向(4個方向),調整像平面坐標系統。
影像預處理:主要包括金字塔影像生成、影像增強處理等。
對于數碼影像來說,內定向是在影像相機文件參數設置后自動完成的,不需進行內定向處理;但對框幅式影像,需要至少設定一張影像的框標模板,然后再以該模板進行其他影像的自動內定向,并進行檢查。
自動匹配模型連接點:在POS信息的輔助下,根據模式識別技術和多像影像匹配等技術,在左右影像中匹配同名像點。
外業控制點量測:主要有左右片量測同名像點和立體量測的兩種方式。
測區立體模型計算及平差處理:根據設置的平差參數進行光束法區域網平差計算;
精度檢查:主要包括模型連接點質量檢查和控制點殘差檢查,經過調整處理滿足精度要求后,導出平差計算和精度統計報告。
INPHO軟件空三加密流程如圖1所示。

圖1 INPHO軟件空三加密流程
2數據實驗及方法探討
數碼影像為RCD30相機拍攝,相機焦距為53 mm,像幅為9 000×6 732,像元大小為6 μ,影像清晰,整體曝光均勻,但個別影像存在色差和亮度不均;POS數據主要采用差分技術經過聯合平差計算獲得,并通過坐標轉換和高程擬合后生成國家2000坐標系中的數據成果,其整體精度好;外控成果主要由GPS測量和差分解算獲得,其坐標系統與POS數據一致,點之記清楚易讀,存有電子檔和紙質版。
2.1 影像預處理操作
影像金字塔主要在像片放大和空三加密中的迭代過程中應用(無影像金字塔會提示錯誤)[10]。在INPHO軟件中支持外部金字塔和內部金字塔兩種模式,外部金字塔單獨存儲為*.pyr文件格式,內部金字塔存儲于原始影像中,將會改變原始影像,因此需要提前對原始影像進行備份,但其兼容性和處理速度高于外部金字塔模式。為便于將測區立體模型導入到航天遠景MapMatrix立體測圖軟件中進行后續的立體量測,對所有影像都進行內部金字塔處理。
拍攝時,由于曝光和環境因素的影響,可能會造成影像色調不均、明暗度不均等,需要對個別影像進行增強處理,以保證整個測區的影像質量均衡。在INPHO軟件中主要由ImageCommander模塊的RadioMetix工具來實現影像的亮度、灰度和對比度增強等處理。對影像進行增強處理,有利于模型連接點的自動匹配,并且能有效地促進后續的DOM生產(如圖2、圖3所示)。
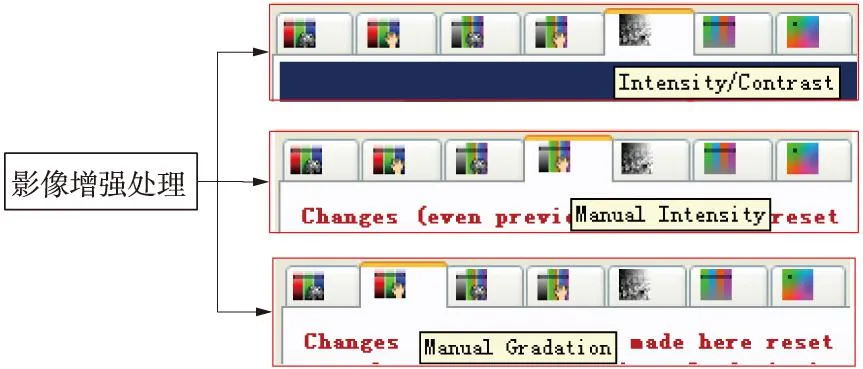
圖2 影像增強處理操作

圖3 影像增強處理示例
2.2 外控點量測順序及加密點預量測
進行空三加密處理時,可在模型連接點自動匹配之前,手動量測測區范圍四角位置的控制點,用于輔助模型連接點的自動匹配;若無控制點數據,亦可在測區范圍的四角位置手動量測四組加密點(如圖4所示)。
在未進行模型連接點匹配前,僅基于POS信息的輔助可構建出測區整體的基本模型,但立體像對可能存在視差,因此具體的量測操作宜采用左右片量測同名像點的方式進行。通過提前量測四角控制點或加密點后再自動匹配模型連接點,可以有效地減少模型連接點的誤匹配。
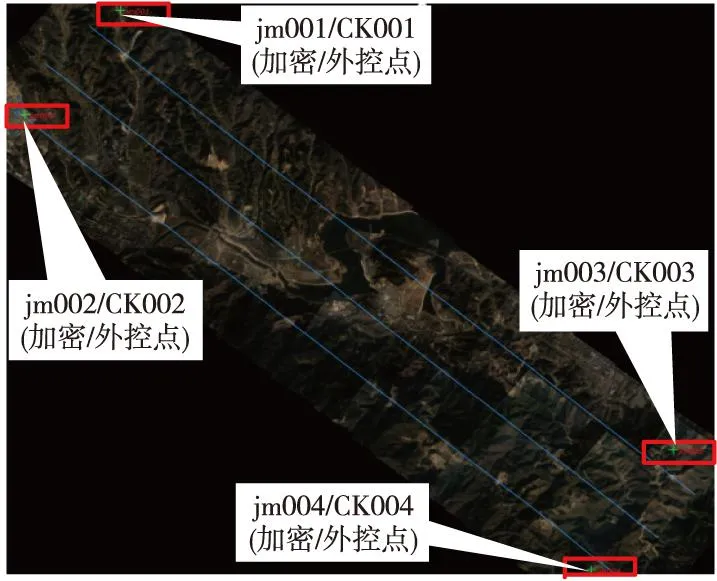
圖4 手動量測加密點/控制點示意
在完成測區模型連接點的自動匹配后,需要對這類手動量測的控制點或連接點采用立體量測的方式進行檢查和核實,同時完成整個測區所有控制點的立體量測。
2.3 模型連接點精度檢查
通過自動匹配處理后,可獲得大量的模型連接點,需要對它們進行質量和精度檢查。首先可通過空三結果精度統計文件來查看模型連接點的殘差分布,剔除殘差過大的模型連接點,然后回到INPHO軟件的photo measure tool模塊中進行模型連接點的分布和強度檢查(如圖5、圖6所示)。
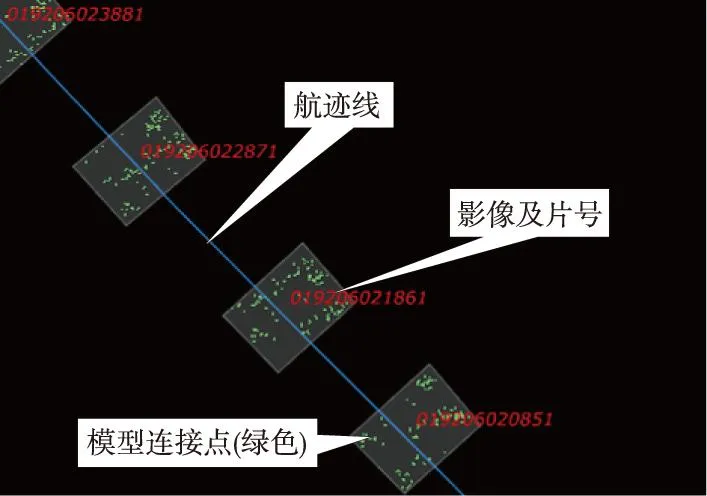
圖5 模型連接點分布示意
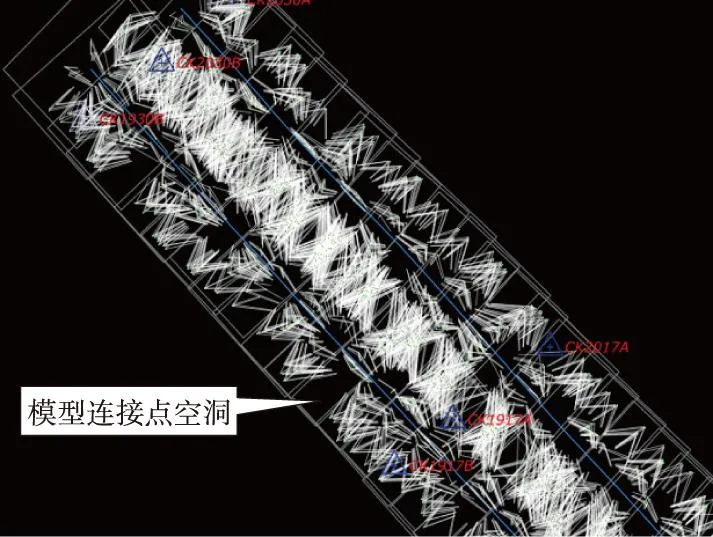
圖6 模型連接點強度示意
通過模型連接點的分布和強度檢查后,會發現連接點空洞,因此需要在連接點空洞處以立體量測的方式手動增加連接點,補足空洞,以增強測區模型的穩定性和系統性(如圖7所示)。

圖7 手動補足模型連接點空洞示意
2.4 POS數據的有效引入
在進行模型連接點的自動匹配和空三平差計算時,有效地利用POS信息的GNSS和IMU數據可以保證控制點的量測精度和模型連接點的精確匹配。
在進行模型連接點的自動匹配和空三平差后處理計算時,一般情況下都應采用GNSS和IMU數據,同時針對IMU數據還應計算視準軸偏差值(“Compute boresight misalignment angles”)。
在INPHO軟件中,GNSS和IMU的精度是采用經驗定權法[9]以標準差(Standard Deviation)指標來衡量的。針對不同精度的GNSS和IMU數據,可以通過設定其標準差值來控制它們對空三加密平差計算的權重。軟件中設定了默認的標準差值(GNSS均為0.1 m,IMU均為0.008度),在空三平差后處理計算時,可根據具體的情況和外控點的精度,適當地調整GNSS和IMU的標準差值,以保證空三加密的精度,如GNSS設為0.2 m,IMU設為0.001度。
3結論
以武漢至襄陽、十堰鐵路帶狀測區多個測段的數碼影像為依托,在POS信息的輔助下,采用INPHO軟件進行空三加密處理。通過多個航帶數據的處理操作,探討和總結出采用INPHO軟件對帶狀測區數碼影像進行POS輔助空三加密的四點方法和技巧:
①為保證與后續的立體測圖系統無縫連接,影像金字塔宜采用內部金字塔模式,并提前對原始影像進行備份。針對個別色調和亮度不均的影像,還應進行亮度、灰度和對比度增強處理,以保證整個測區影像質量均衡。
②在進行模型連接點自動匹配前,應在測區四角范圍,以左右片量測同名像點的方式手動量測四個控制點或四組加密點,可有效減少模型連接點的誤匹配。
③對模型連接點的分布圖和強度圖進行檢查,在模型連接點空洞處,以立體量測的方式手動增加模型連接點,增強測區模型的穩定性和系統性。
④POS信息的GNSS和IMU數據在進行模型連接點的自動匹配和空三平差后處理計算時都應采用,其精度一般可采用INPHO系統默認的標準差值,同時還應計算IMU視準軸偏差值;其次,在進行空三平差后處理計算時,為保證外控點的平差精度,可適當地調整GNSS和IMU的標準差值,以增強或減弱POS信息對平差計算的權重,獲得滿足精度要求的空三加密成果。
參考文獻
[1]張劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2003
[2]張祖勛,張劍清.數字攝影測量學[M].武漢:武漢大學出版社,1997
[3]胡海友.基于Inpho的空三加密及正射影像制作方法研究[J].鐵道勘察,2013(6)
[4]劉江瑜.基于新型傳感器的空三加密研究及精度分析[J].鐵道勘察,2013(2)
[5]楊少文.IMU/DGPS輔助航空攝影新技術在鐵路勘測中的應用[J].鐵道勘察,2011(5)
[6]張麗,周琦.結合LIDAR和RCD相機的1∶2 000地形圖生產探討[J].鐵道勘察,2012(6)
[7]楊莉.POS輔助下Inpho軟件空三加密研究及精度分析[J].創新科技導報,2013(11)
[8]龍海奎,曾慶友,吳珊.POS系統在空三加密中的應用與分析[J].城市勘測,2011(5)
[9]魯藝玲.POS輔助空中三角測量中的定權研究[D].成都:西南交通大學,2013
中圖分類號:P231.4; P228.4; P227.9
文獻標識碼:A
文章編號:1672-7479(2015)02-0005-03
作者簡介:楊希(1985—),女,2009年畢業于西南交通大學攝影測量與遙感專業,碩士,工程師,E-mail:tsygkyyx@163.com。
收稿日期:2015-01-08
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19