基于Kalman濾波的激光陀螺系統(tǒng)極標(biāo)定方法研究*
2015-03-14 08:07:57霍庚
艦船電子工程 2015年5期
霍 庚
(92941部隊(duì)95分隊(duì) 葫蘆島 125000)
?
基于Kalman濾波的激光陀螺系統(tǒng)極標(biāo)定方法研究*
霍 庚
(92941部隊(duì)95分隊(duì) 葫蘆島 125000)
針對(duì)傳統(tǒng)的分立標(biāo)定方法標(biāo)定精度受姿態(tài)基準(zhǔn)精度的制約,且不滿足帶減振器的慣性測(cè)量單元(IMU)標(biāo)定及現(xiàn)場(chǎng)標(biāo)定的需求,提出一種基于Kalman濾波器的系統(tǒng)級(jí)標(biāo)定方法。為了確保解的唯一性,該方法引入了基準(zhǔn)坐標(biāo)系的約束條件,以速度誤差為觀測(cè)量,對(duì)激光陀螺及加速度計(jì)相關(guān)誤差參數(shù)進(jìn)行最優(yōu)估計(jì)及辨識(shí)。仿真結(jié)果證明該方法的有效性及可行性,滿足高精度慣導(dǎo)系統(tǒng)的標(biāo)定需求。
激光陀螺; Kalman濾波器; 系統(tǒng)級(jí)標(biāo)定; 最優(yōu)估計(jì)
Class Number U666.1
1 引言
目前國(guó)內(nèi)精度最高的激光陀螺為機(jī)抖激光陀螺,為了隔離外界運(yùn)動(dòng),保證機(jī)抖陀螺穩(wěn)定可靠地工作,機(jī)抖陀螺慣性測(cè)量單元(Inertial Measurement Unit,IMU)一般通過(guò)減振器與載體相連[1]。傳統(tǒng)的分立標(biāo)定[2~5]方法需要依靠精密轉(zhuǎn)臺(tái)等設(shè)備提供高精度姿態(tài)基準(zhǔn),而減振器在標(biāo)定過(guò)程中將產(chǎn)生一定的形變,間接地降低了姿態(tài)基準(zhǔn)的精度,從而使標(biāo)定精度降低。即使不存在減振器的情況,文獻(xiàn)研究表明[6~9],基于精密轉(zhuǎn)臺(tái)等設(shè)備提供姿態(tài)基準(zhǔn)的標(biāo)定方法精度受設(shè)備自身精度的制約,如角秒級(jí)精密轉(zhuǎn)臺(tái)將引入同量級(jí)的安裝誤差標(biāo)定誤差,不能滿足高精度姿態(tài)測(cè)量系統(tǒng)在高動(dòng)態(tài)環(huán)境下的應(yīng)用需求。另外,傳統(tǒng)的分立標(biāo)定方法需要精密轉(zhuǎn)臺(tái)等高精度姿態(tài)基準(zhǔn)設(shè)備和隔振地基,一般只有實(shí)驗(yàn)室環(huán)境才能滿足其使用要求,慣性測(cè)量單元在長(zhǎng)期使用過(guò)程中如果需要維護(hù)、更換慣性元器件,將需要返回實(shí)驗(yàn)室進(jìn)行重新標(biāo)定,既很繁瑣也很費(fèi)時(shí)費(fèi)力。因此,研究實(shí)現(xiàn)不需要高精度姿態(tài)基準(zhǔn)且靈活方便的系統(tǒng)級(jí)標(biāo)定方法是非常有意義的。
2 系統(tǒng)級(jí)標(biāo)定Kalman濾波模型
2.1 參考系與慣性器件誤差模型
在進(jìn)行慣性測(cè)量單元標(biāo)定時(shí),首先必須指定一個(gè)慣性元器件的正交參考坐標(biāo)系,基于精密轉(zhuǎn)臺(tái)的分立標(biāo)定方法一般選取轉(zhuǎn)臺(tái)坐標(biāo)性作為其參考系,系統(tǒng)級(jí)標(biāo)定方法中沒(méi)有轉(zhuǎn)臺(tái)系作為基準(zhǔn),必須作出新的約束[10]。本文建立了附加約束條件的陀螺和加速度計(jì)安裝坐標(biāo)系數(shù)學(xué)模型,在理想的情況下,要求三個(gè)陀螺儀的各敏感軸方向是互相正交的,并且與固聯(lián)在其安裝框架上的慣性測(cè)量參考系xryrzr一致,各加速度計(jì)的敏感軸方向也應(yīng)該與參考系一致。
實(shí)際上,由于機(jī)械加工及裝配工藝的限制,三個(gè)加速度計(jì)組成的加速度計(jì)坐標(biāo)系xayaza和三個(gè)陀螺組成的陀螺坐標(biāo)系xgygzg均不是正交坐標(biāo)系,兩者也不重合,標(biāo)定實(shí)驗(yàn)的目的之一就是尋找這兩個(gè)非正交坐標(biāo)系到一個(gè)正交的參考坐標(biāo)系的轉(zhuǎn)換矩陣,這兩個(gè)矩陣即陀螺和加速度計(jì)的安裝誤差陣Mg、Ma,分別表示為[5,11]
(1)
(2)
基于精密轉(zhuǎn)臺(tái)的分立標(biāo)定方法一般選取轉(zhuǎn)臺(tái)坐標(biāo)性作為其參考系,系統(tǒng)級(jí)標(biāo)定方法中沒(méi)有轉(zhuǎn)臺(tái)系作為基準(zhǔn),應(yīng)該做出新的約束,這種約束是有效的且必要的,沒(méi)有約束將導(dǎo)致安裝誤差標(biāo)定的解不唯一。一種常用的定義慣性測(cè)量參考系的辦法是令xryrzr系中的xr與xa即x加速度計(jì)的敏感軸方向一致,并且規(guī)定yr在oxaya平面內(nèi),然后根據(jù)右手系確定zr,此時(shí)ηxz、ηxy、ηyx均為零。加速度計(jì)安裝誤差表示式可改寫為
(3)
激光陀螺IMU系統(tǒng)級(jí)標(biāo)定是建立在誤差方程基礎(chǔ)上的,因此首先必須建立系統(tǒng)的誤差模型。參考坐標(biāo)系建立以后,考慮激光陀螺及加速度計(jì)常值漂移、刻度系數(shù)誤差與安裝誤差,激光陀螺慣性測(cè)量單元中陀螺的輸出誤差方程可表示為[6,10~11]:
Δω=εb+δkgω+Mgω
(4)

考慮加速度計(jì)零偏、刻度因子誤差及安裝誤差,加速度計(jì)的誤差輸出方程表示如下:

(5)
2.2 Kalman濾波器設(shè)計(jì)
1) 狀態(tài)變量的選取
本文選擇以加速度計(jì)輸入軸為基礎(chǔ)確定參考坐標(biāo)系,此時(shí)加速度計(jì)安裝誤差系數(shù)簡(jiǎn)化為三個(gè)參數(shù),激光陀螺安裝誤差用共六個(gè)系數(shù)描述,此時(shí)用于系統(tǒng)級(jí)標(biāo)定的Kalman濾波器狀態(tài)變量選取如下,共27維:
(6)
2) 系統(tǒng)誤差狀態(tài)方程
在考慮各器件相關(guān)誤差項(xiàng)的影響之后,系統(tǒng)誤差方程表示如下[10~12]。
速度誤差方程:
(7)
3) 觀測(cè)量的選取
為了使標(biāo)定算法不依賴于高精度姿態(tài)基準(zhǔn),本文研究?jī)H以速度誤差為觀測(cè)量的系統(tǒng)級(jí)標(biāo)定方法,姿態(tài)誤差不可直接觀測(cè),在標(biāo)定過(guò)程中只存在角運(yùn)動(dòng),沒(méi)有線運(yùn)動(dòng),在沒(méi)有慣性元件誤差的理想情況下輸出速度為零,本文選取觀測(cè)量為Z=[δVEδVNδVU]。僅以速度誤差為觀測(cè)量的系統(tǒng)級(jí)標(biāo)定方法的標(biāo)定流程如下:慣性測(cè)量系統(tǒng)進(jìn)入測(cè)量狀態(tài)后,陀螺儀、加速度計(jì)的各誤差量(刻度因子、安裝誤差、零偏)在設(shè)定的標(biāo)定路徑下得到激勵(lì),通過(guò)誤差傳播影響系統(tǒng)的解算輸出,以速度解算誤差作為觀測(cè)量,通過(guò)設(shè)計(jì)的系統(tǒng)級(jí)標(biāo)定用27維Kalman濾波器對(duì)各標(biāo)定參數(shù)進(jìn)行最優(yōu)估計(jì)與辨識(shí),從而完成標(biāo)定過(guò)程。
3 仿真研究
3.1 參數(shù)設(shè)置
為了驗(yàn)證本文提出方法的有效性,對(duì)各誤差參數(shù)進(jìn)行充分的激勵(lì)。參照實(shí)驗(yàn)室現(xiàn)有的某型機(jī)抖激光陀螺慣性測(cè)量單元實(shí)際的標(biāo)定參數(shù)大小,按照合適的標(biāo)定路徑,利用C語(yǔ)言程序模擬產(chǎn)生了標(biāo)定過(guò)程中的陀螺和加速度計(jì)數(shù)據(jù),并根據(jù)誤差狀態(tài)方程設(shè)計(jì)了一個(gè)包含27維狀態(tài)變量的Kalman濾波器,仿真參數(shù)設(shè)置如下所示:陀螺零偏(°/h):0.05/0.05/0.05,陀螺比例因子誤差(10-6):100/50/100,陀螺安裝誤差(arcsec):-173.02/277.51/-31.65/82.26/-34.53/253.67,加速度計(jì)零偏(mg):0.05/0.05/0.05,加速度計(jì)比例因子誤差(10-6):100/50/100,加速度計(jì)安裝誤差(arcsec):-217.00/382.30/-25.20
3.2 仿真結(jié)果及分析
按照上面的參數(shù)設(shè)置,運(yùn)行仿真程序,得到陀螺及加速度計(jì)各誤差參數(shù)估計(jì)結(jié)果。限于篇幅的原因,僅給出陀螺零偏及比例因子誤差曲線圖,如圖1、圖2所示。
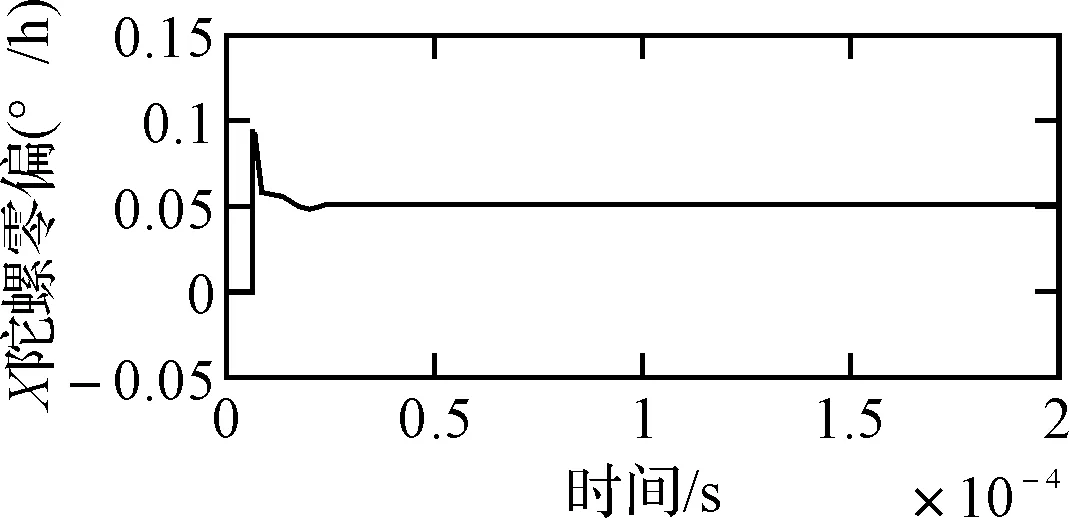


圖1 各陀螺零偏標(biāo)定結(jié)果
圖1為各陀螺零偏標(biāo)定結(jié)果,最終估計(jì)值為0.0515/0.0511/0.0492,參數(shù)精度優(yōu)于0.005°/h;圖2為各陀螺比例因子誤差標(biāo)定結(jié)果,最終估計(jì)值為99.8/50.1/100.2(10-6),參數(shù)精度優(yōu)于0.5(10-6);陀螺安裝誤差(arcsec):-173.25/277.13/-31.99/81.4/-34.85/253.93,安裝誤差估計(jì)精度優(yōu)于1″;加速度計(jì)零偏(mg):0.046/0.054/0.047,加速度計(jì)比例因子誤差(10-6):99.8/49.6/100.2,加速度計(jì)安裝誤差(arcsec):-217.31/382.63/-25.52。從數(shù)據(jù)可以看出,陀螺和加速度計(jì)各標(biāo)定參數(shù)均得到很好的估計(jì),滿足高精度慣導(dǎo)系統(tǒng)的標(biāo)定需求。
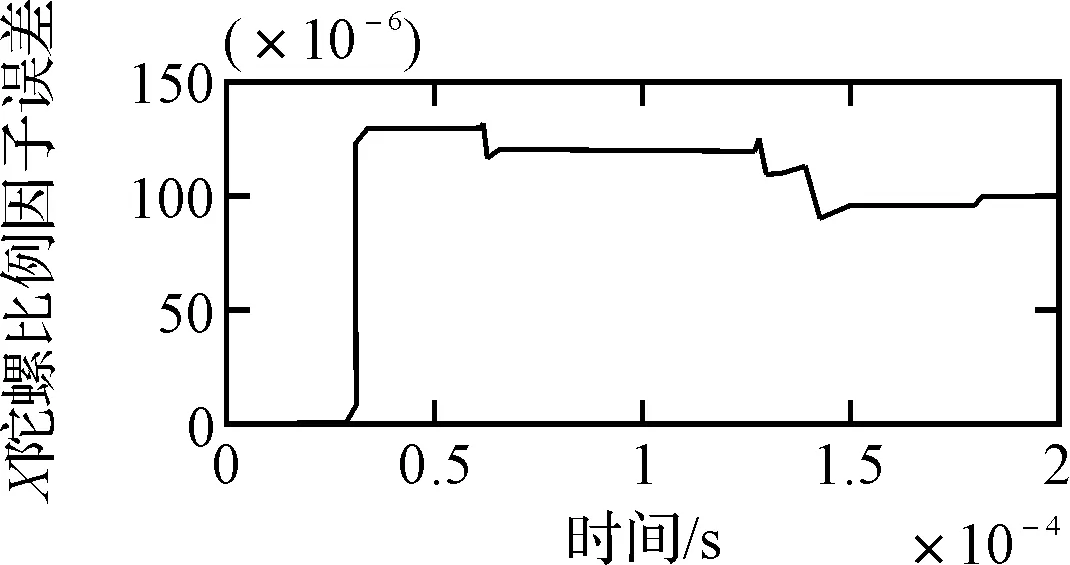


圖2 各陀螺比例因子誤差標(biāo)定結(jié)果
4 結(jié)語(yǔ)
本章研究了一種基于Kalman濾波并以速度誤差為觀測(cè)量的IMU系統(tǒng)級(jí)標(biāo)定方法,指出不對(duì)參考坐標(biāo)系進(jìn)行約束將導(dǎo)致安裝誤差標(biāo)定解的不唯一,引入了系統(tǒng)級(jí)標(biāo)定方法基準(zhǔn)坐標(biāo)系的約束條件,推導(dǎo)了此約束條件下的安裝誤差表達(dá)式,使標(biāo)定結(jié)果具有唯一解。推導(dǎo)了慣性測(cè)量單元的系統(tǒng)級(jí)誤差參數(shù)標(biāo)定Kalman濾波模型,此模型僅以速度解算誤差為觀測(cè)量,因而系統(tǒng)的標(biāo)定精度不受轉(zhuǎn)臺(tái)精度的限制。通過(guò)理論分析及仿真研究表明,本文設(shè)計(jì)的標(biāo)定路徑及濾波算法在無(wú)需精密轉(zhuǎn)臺(tái)提供精確姿態(tài)基準(zhǔn)的情況下,能準(zhǔn)確估計(jì)出了激光陀螺慣性測(cè)量單元與陀螺相關(guān)的各誤差參數(shù)。適用于帶減振器條件和現(xiàn)場(chǎng)標(biāo)定環(huán)境,標(biāo)定精度不受轉(zhuǎn)臺(tái)精度的限制,適用于高精度慣導(dǎo)系統(tǒng)的標(biāo)定。
[1] 王宇.機(jī)抖激光陀螺捷聯(lián)慣導(dǎo)系統(tǒng)的初步探索[D].長(zhǎng)沙:國(guó)防科技大學(xué),2005.
[2] Rice H, Kelmenson S, Mendelsohn L. Geophysical navigation technologies and applications[C]//Position Loction and Navigation Symposium, PLANS2004, 26-29 April 2004:618-624.
[3] Zhang Hongliang, Wu Yuanxin, Wu Meiping, et al. A multi-position calibrationalgorithm for inertial measurement units[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, Hawaii,2008.
[4] Bekkeng J K. Calibration of a novel MEMES inertial reference unit[J]. IEEE Transactions on Instrumentation and Measurement,2009,58(6):1967-1974.
[5] GUO Peng-fei, WANG Mei, REN Zhang, et al. The new calibration algorithm for the low-cost fiber-optics gyroscope[C]//Proceedings of the 2006 IEEE/ION Position, Location and Navigation Symposium,2006:739-743.
[6] 嚴(yán)恭敏,秦永元.激光捷聯(lián)慣組的雙軸位置轉(zhuǎn)臺(tái)標(biāo)定仿真[J].中國(guó)慣性技術(shù)學(xué)報(bào),2007,15(1):123-127.
[7] 白雪峰,趙剡.單軸速率三軸位置慣性測(cè)試轉(zhuǎn)臺(tái)誤差及傳遞分析[J].航天控制,2006,24(2):26-29.
[8] 鄧志紅,劉亞辰,王清哲.轉(zhuǎn)臺(tái)角位置基準(zhǔn)誤差對(duì)激光捷聯(lián)慣導(dǎo)標(biāo)定的影響分析[J].中國(guó)慣性技術(shù)學(xué)報(bào),2009,17(4):498-504.
[9] 肖桂平.光學(xué)陀螺捷聯(lián)慣導(dǎo)系統(tǒng)的標(biāo)定精度分析[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2008.
[10] 袁保倫,饒谷音.一種新的激光陀螺慣性測(cè)量組合標(biāo)定方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2007,15(1):31-34.
[11] 袁保倫.四頻激光陀螺旋轉(zhuǎn)式慣導(dǎo)系統(tǒng)研究[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2007:100-102.
[12] 劉錫祥,徐曉蘇.慣性測(cè)量組件整體標(biāo)定技術(shù)[J].中國(guó)慣性技術(shù)學(xué)報(bào),2009,17(5):568-576.
Systematic Calibration Method for RLG Based on Kalman Filter
HUO Geng
(Unit 95, No. 92941 Troops of PLA, Huludao 125000)
The precision of traditional calibration method is limited by the attitude reference, and it doesn’t satisfy the IMU calibration with shock absorbers and field calibration requirements. So an systematic calibration method based on Kalman filter is developed in this paper. A restriction on the reference frame of RLG and acceleraters is added in order to make the calibration result exclusive, and this filter only uses the velocity errors as the observational vectors, and relative parameters of RLG and acceleraters are made optimal estimation and identification. The simulation results indicate that the method is so feasibal and effective that it could satisfy the requirements of high precision inertial navigation system.
RLG, Kalman filter, systematic calibration, optimal estimation
2014年11月8日,
2014年12月27日
霍庚,女,碩士,工程師,研究方向:慣性導(dǎo)航。
U666.1
10.3969/j.issn1672-9730.2015.05.012
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
