帕金森患者步行運動的定量分析
2015-03-12 08:59:34喬子晏高帥鋒劉春風毛成潔
東南大學學報(自然科學版) 2015年2期
關鍵詞:信號
汪 豐 鄒 亞 喬子晏 高帥鋒 劉春風 毛成潔
(1 東南大學生物科學與醫學工程學院,南京210096)
(2 蘇州大學附屬第二醫院,蘇州215004)
步行是人類活動的基礎,被公認為是世界上最好的運動[1].有規律的行走具有降低血壓、改善大腦與植物神經功能、預防老年癡呆等作用.正常人行走時上下肢和軀干之間不斷地協調變化,雙側下肢交替負重,兩臂輕松地隨著兩腿的交替運動而擺動,保持身體的協調與穩定.然而,當人們在疾病、甚至生理功能和精神狀態發生變化時,人體的步行行為會受到不同程度的影響.因此,對步行運動的運動特征進行深入的分析研究,有助于制定康復治療方案和評價藥物效果.
目前,分析人體步行運動常用的方法有量表評定法和計算機視覺技術法.前者受主觀因素影響較大,且運動功能的細微變化不易被發現;后者的實時性較差,且受設備場地限制.近年來,采用穿戴式傳感器獲取信息的方法越來越受到青睞,該方法可獲得人體在行走過程中的多項運動學參數.例如,Xuan 等[2]在患者的左右腳鞋子上固定加速度和角速度傳感器,結合時空域的分析方法,計算帕金森病(Parkinson's disease,PD)患者的步長、步態對稱性和節律性等;Popovic 等[3]在患者雙側下肢的大腿、小腿部位固定加速度傳感器,以檢測PD 患者的凍結步態.這些研究方法對于分析和評價人體運動功能具有重要作用.
在現有技術的基礎上,本文設計了一套基于三軸加速度和三軸角速度傳感器的運動功能評價系統.首先,將傳感器采集節點分別佩戴在人體的上下肢和軀干中心部位,采集人體行走過程中的加速度和角速度數據;然后,對采集到的數據進行分析處理和計算,進而得到人體行走時的運動學參數;最后,對比分析了PD 患者和健康老人兩組人群的運動數據.實驗結果表明,本文提出的運動功能評估系統能夠有效地評價PD 患者的運動功能.
1 無線傳感器網絡系統的設計
隨著電子器件微型化和低功耗技術的發展,基于穿戴式傳感器技術監測采集人體運動數據的方法備受關注.然而,現有方法主要是采用單個傳感器來分析人體步態的運動特征,忽略了行走過程中手臂擺動對人體步態和軀干協調性的影響,因此難以對行走進行綜合系統的評價[4].
本文所設計的運動功能評價系統的硬件部分主要包括數據采集發送模塊和數據接收模塊.數據接收模塊通過USB 接口與電腦相連.數據采集發送模塊共包括5 個數據采集終端節點,它們分別佩戴于人體的左右腳踝部、左右手腕的背側和腰部中心.每個數據采集終端節點由中央控制器(MSP430F149芯片)、數據存儲模塊(W25Q256 芯片)、電源模塊、無線通信模塊(ZigBee 芯片)和傳感器模塊(MPU6050 芯片)組成.其中,MPU6050芯片由Invensense公司生產,安裝有全格感測范圍為±250,±500,±1 000,±2 000 (°)/s 的三軸角速度傳感器,可準確追蹤快速與慢速動作,用戶可程式控制的加速度傳感器的全格感測范圍為±2g,±4g,±8g,±16g.本文中,加速度傳感器的量程選擇使用±8g,陀螺儀的量程選擇使用±1 200 (°)/s,加速度和角速度的數據采樣率統一為100 Hz.
2 步行運動參數分析與計算
行走是反映人體上下肢運動能力最直觀的因素[5],因此,分析行走過程中的運動學特征具有重要的研究價值.
2.1 步行運動數據的預處理
受系統硬件和外界干擾,實驗所采集的原始數據中摻雜著多種噪聲.為準確計算運動學參數,需要對所采集到的數據進行預處理.首先,采用截止頻率為6 Hz 的三階巴特沃斯濾波器對角速度數據進行預處理;然后,采用小波閾值去噪的方法對加速度數據進行濾波處理[6];最后,利用滑動平均濾波器對加速度和角速度數據進行平滑處理.預處理后的加速度曲線如圖1所示.由于佩戴時傳感器x軸方向垂直向下,因此x 軸的加速度值以g 為基線上下波動.
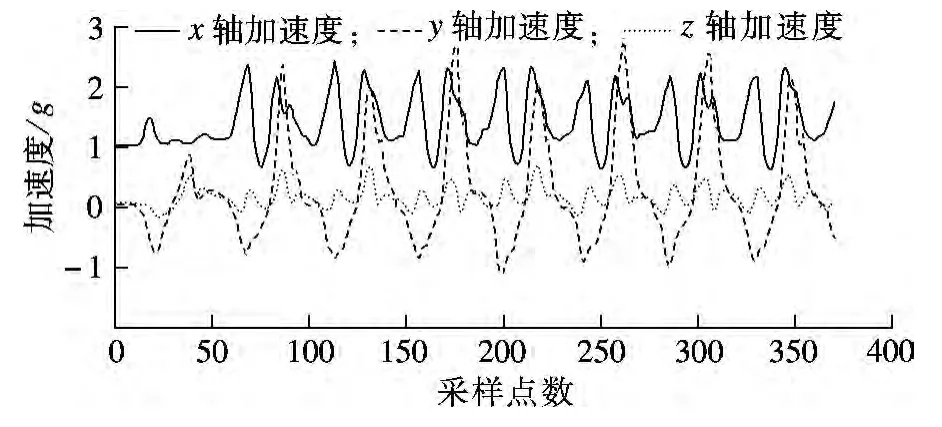
圖1 單側下肢步態加速度曲線
2.2 上肢運動參數分析與計算
研究表明,人體手臂的不同擺動模式(甚至擺動的先后順序和擺動的幅度頻率)嚴重影響著行走模式.行走時手臂有節律地交替擺動可以起到抵消身體沿中軸扭轉力的作用,從而有利于行走的協調與穩定[7].本文采集了健康老人和PD 患者兩組人群行走過程中的手臂擺動加速度和角速度數據,對擺臂幅度、速度、角度和左右手臂擺動節律性等運動學參數進行分析.人體手臂在t 時刻擺動的角度θt可根據下式計算:

式中,θ0為起始時刻的角度;wt為t 時刻的角速度.
信號本身夾雜著噪聲,長時間的積分會造成誤差的累計,從而引起嚴重的基線漂移.本文采用分段積分的方法來解決這一問題.由于實驗過程中加速度信號的變化幅度較小,周期性較差,因此分段依據為角速度信號的準周期性.手臂擺動幅度的計算步驟如下:
①計算人體手臂擺動在前后、左右和上下方向的加速度值,即

式中,x1,y1,z1分別為傳感器坐標下x,y,z 軸方向上的加速度;x2,y2,z2分別為地理坐標系下x,y,z軸方向上的加速度;C 為旋轉矩陣,且

式中,θ,r,φ 分別為傳感器在x,y,z 軸方向上的旋轉角度.
②對求得的3 個方向加速度值分別進行積分,計算出3 個方向的速度值.
③對3 個方向的速度值再次積分,計算出3個方向的位移.
2.3 下肢運動參數分析與計算
步行周期是指一側下肢完成從足落地到再次落地的時間過程.根據下肢在步行時所處的位置可以把整個步行周期分為支撐相和擺動相.其中,支撐相是指下肢接觸地面及承受重力的時間;擺動相是指足離開地面向前邁步到再次落地之間的時間[8].目前,在研究人體下肢運動時,主流方法是通過步態參數的計算來實現的.其中,常用的步態參數主要包括步長、步速、下肢關節角度、步態節律性以及步態相位等.其步長、步速、下肢關節角度的計算與2.2 節中手臂擺動參數計算原理類似;步態相位的起止點如圖2所示.由圖中的步態角速度信號時域波形可知,人體的步態信號具有良好的規律性和周期性,同側下肢角速度信號相鄰波峰之間的距離可以表示為一個復步的步行周期,兩側下肢相鄰波峰之間的距離可以表示為一個單步的步行周期.設n 為每個復步周期的采樣點,f 為采樣頻率,則步態節律性R 的計算公式為


圖2 下肢部位傳感器采集節點的角速度曲線
通過選擇不同的起始點,可劃分出不同種類的步態周期.圖2中,復步長和單步長的周期劃分依據角速度信號的峰值,而擺動期和支撐期的周期劃分則依據角速度信號的谷值.正常情況下,支撐期占整個步行周期的60%,擺動期占整個步行周期的40%[9].
2.4 旋轉參數分析與計算
本文所設計的實驗是10 m 折返行走實驗.其中,在往返10 m 行走中有一段轉彎的過程,該過程中的數據是分析計算軀干旋轉參數的主要依據.測試對象腳踝部傳感器采集節點的單軸角速度曲線如圖3所示.
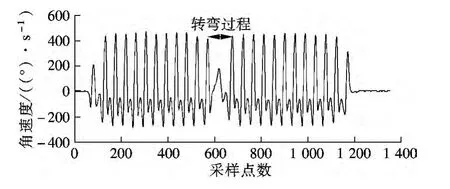
圖3 腳踝部傳感器采集節點的角速度曲線
針對PD 患者肌肉僵直、運動遲緩甚至出現凍結步態的臨床特征,本文主要分析計算左右腳轉彎所用時間、轉彎過程的平均合角速度和轉彎過程中合加速度信號均方根3 個參數.其中,合加速度信號均方根的計算公式為

式中,am為m 時刻的加速度值;ua為合加速度信號均值.
3 步行運動對稱性協調性的評估
人體步行的對稱性和協調性反映了人體行走時平衡受到干擾后趨近或返回初始平衡狀態的能力,是預測跌倒風險的重要指標.目前,關于人體行走時手臂擺動和步態之間協調性的研究較少,這主要是因為實驗所需采集的數據量較大,而且沒有相關的標準供參考等.本文根據所采集到的健康老人和PD 患者在步行運動過程中的擺臂和步態加速度和角速度數據,分析計算了2 組人群的對稱性和協調性.對稱性的計算分析方法很多[10],本文根據下式來計算人體雙側下肢的對稱性:

式中,TZ為正常人的步態周期;T 為實際測量的步態周期;Zr為人體左右側下肢支撐相的比值;Mr為人體左右側下肢擺動相的比值.
由式(6)可知,S 越接近于1,說明人體雙側下肢的對稱性越好.
在分析步行運動過程中人體協調性時,本文主要研究了上下肢動作的順序先后性、一致性和動作的幅度.其中,上下肢動作順序先后性可根據下式進行計算:

式中,ti和tj分別為事件i 和事件j 的起始時刻;Tij為2 個事件的時間差.
2 組人群步行運動對稱協調參數均值見表1.

表1 2 組人群對稱協調參數均值
4 結果分析與討論
13 例PD 患者和15 例健康老人步行運動過程中加速度和角速度數據的部分統計結果見表2.由表可知,較健康老人而言,PD 患者行走時上肢運動特征變化主要包括手臂擺動的幅度減小、手臂擺動的角速度幅度差明顯下降、上肢擺臂的對稱性略有降低;下肢運動特征的變化主要包括步長減小、支撐相所占比率加大、擺動相縮短、步態節律性增加且波動性較大;軀干旋轉的運動特征主要包括轉彎時間明顯增加、上下肢的對稱協調性降低.PD 患者的波動性明顯大于健康老人,說明PD 患者動作的連續性和穩定性較差,這也是導致患者容易跌倒的重要原因.

表2 2 組人群運動學參數均值
由式(1)~(3)可知,在計算空間參數(如步長、擺臂幅度等)時,首先要對角速度信號進行一次分段積分,求出地理坐標系下的加速度信號,然后對加速度信號進行二次積分,求得位移空間參數.然而,經過預處理后的加速度和角速度信號仍具有干擾噪聲,這些干擾信號在積分過程中會被逐步放大,進而影響計算結果.本文參照文獻[11]的方法對空間參數計算結果進行處理,系統實際測量100 cm 所得的誤差為±8.37 cm.
在目前人體步態研究的基礎上,本文研究了人體手臂擺動和軀干旋轉.實驗結果表明,在行走過程中,人體手臂擺動的幅度、對稱性和軀干轉彎所用的時間等參數對人體運動功能的評價具有重要作用.對比分析PD 患者和健康老人步行運動時的運動特征可知,本文設計的系統不僅操作簡單方便,提高了醫生的工作效率,而且能夠提供更客觀可量化的數據,有助于提高診斷率和醫患之間的信任度.
5 結語
本文所設計開發的運動功能評價系統主要包括硬件和軟件2 個部分.其中,硬件部分主要是指運動數據的采集設備,其核心是MPU6050 模塊,負責采集人體運動過程中的加速度和角速度信號.軟件部分主要是加速度和角速度信號的分析處理算法部分,負責計算研究人體運動功能評價的參數指標.實驗結果證明,該系統具有較好的實用價值.
References)
[1] 汪琳,程君.步行者權利的比較與思考[J].江西教育學院學報,2012,33(3):128-132.Wang Lin,Cheng Jun.Compairing and thinking about pedestrian's rights[J].Journal of Jiangxi Institute of Education,2012,33(3):128-132.(in Chinese)
[2] Xuan Y,Zhao Z,Fang Z,et al.Gait cycle recognition based on wireless inertial sensor network[J].IERI Procedia,2013,4:44-52.
[3] Popovic M B,Djuric-Jovicic M,Radovanovic S,et al.A simple method to assess freezing of gait in Parkinson's disease patients[J].Brazilian Journal of Medical and Biological Research,2010,43(9):883-889.
[4] Cutti A G,Giovanardi A,Rocchi L,et al.Ambulatory measurement of shoulder and elbow kinematics through inertial and magnetic sensors[J].Medical &Biological Engineering &Computing,2008,46(2):169-178.
[5] Nanhoe-Mahabier W,Snijders A H,Delval A,et al.Walking patterns in Parkinson's disease with and without freezing of gait[J].Neuroscience,2011,182:217-224.
[6] 鄒亞,汪豐.加速度信號小波降噪的改進算法[J].北京聯合大學學報:自然科學版,2014,28(2):64-68.Zou Ya,Wang Feng.Wavelet de-noising algorithm of acceleration signal[J].Journal of Beijing Union University:Natural Science,2014,28(2):64-68.(in Chinese)
[7] Jasiewicz J M,Allum J H J,Middleton J W,et al.Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals[J].Gait &Posture,2006,24(4):502-509.
[8] Liu T,Inoue Y,Shibata K.Development of a wearable sensor system for quantitative gait analysis[J].Measurement,2009,42(7):978-988.
[9] Yang S,Laudanski A,Li Q.Inertial sensors in estimating walking speed and inclination:an evaluation of sensor error models[J].Medical &Biological Engineering&Computing,2012,50(4):383-393.
[10] Sant'Anna A,Salarian A,Wickstrom N.A new measure of movement symmetry in early Parkinson's disease patients using symbolic processing of inertial sensor data[J].IEEE Transactions on Biomedical Engineering,2011,58(7):2127-2135.
[11] Yang S,Zhang J T,Novak A C,et al.Estimation of spatio-temporal parameters for post-stroke hemiparetic gait using inertial sensors[J].Gait & Posture,2013,37(3):354-358.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06