陸戰(zhàn)場ISR無人機威脅分析及其評估模型研究
2015-03-11 03:24:23陳娟馬濤
艦船電子工程 2015年7期
陳 娟 馬 濤
(1.陸軍軍官學院 合肥 230031)(2.電子工程學院 合肥 230031)
?
陸戰(zhàn)場ISR無人機威脅分析及其評估模型研究
陳 娟1馬 濤2
(1.陸軍軍官學院 合肥 230031)(2.電子工程學院 合肥 230031)
分析陸戰(zhàn)場中情報、監(jiān)視和偵察(ISR)無人機的威脅影響因素及其特點,構(gòu)建了ISR無人機威脅評估指標體系,利用遺傳算法優(yōu)化了BP神經(jīng)網(wǎng)絡(luò)評估模型,針對ISR無人機的威脅進行評估分級,仿真結(jié)果實際可行,為陸戰(zhàn)場中無人機的編隊模式和航路優(yōu)化提供了可靠依據(jù)。
ISR無人機; 威脅; BP神經(jīng)網(wǎng)絡(luò); 遺傳算法
1 引言
情報、監(jiān)視和偵察(ISR)無人機因其獨特的性能和優(yōu)勢,在戰(zhàn)場偵察、火力校射、電子干擾、毀傷評估等方面發(fā)揮了顯著的作用。但是隨著陸戰(zhàn)場中防空系統(tǒng)的探測距離、射擊精度和抗干擾等能力的提高,影響無人機的威脅越來越多,無人機的生存環(huán)境變差,嚴重影響無人機的編隊模式和執(zhí)行任務(wù)時的航路規(guī)劃。
國內(nèi)一些學者對影響無人機的威脅進行了相關(guān)研究,文獻[1]采用層次分析法和模糊推理技術(shù)對各種對空威脅進行評估建模,但是該模型建立在專家打分的基礎(chǔ)上,并不具備自適應(yīng)和更新能力;文獻[2]針對低空突防建立了威脅模型,但是僅僅考慮地面兵器對無人機的威脅,沒有考慮無人機自身性能對不同威脅的影響;文獻[3]也是從地面角度考慮對無人機的威脅影響。本文認為無人機威脅因素建模時除了地面兵器對無人機的探測和攻擊,還應(yīng)考慮無人機自身性能對影響的抵御能力以及戰(zhàn)場環(huán)境因素。另外,現(xiàn)代戰(zhàn)場瞬息萬變,威脅因素也是不斷變化,因此評估算法選取具有自適應(yīng)、自學習能力的BP神經(jīng)網(wǎng)絡(luò)模型,并且針對傳統(tǒng)BP算法的缺點進行優(yōu)化改進,使得更加有效地對無人機威脅評估建模。
2 ISR無人機威脅評估指標體系
ISR無人機的主要任務(wù)是對地面目標區(qū)進行長時間的實時偵察和監(jiān)視,為指揮員提供大量的情報信息。在無人機執(zhí)行任務(wù)時,要盡可能減少被敵方發(fā)現(xiàn)和擊毀的危險,因此需要將影響無人機的威脅進行量化評估。ISR無人機的外部威脅主要來自敵方的偵察設(shè)備和火力兵器,它們的偵察能力、殺傷力、機動性和抗干擾能力的強弱不同,對無人機的威脅程度也不同。另一方面,無人機自身性能高低也影響威脅評估,例如,ISR無人機的飛行高度、飛行速度、機動性以及編隊航行時的路線不同時,即使在相同的陸戰(zhàn)場環(huán)境中所產(chǎn)生的的威脅也不同。另外,環(huán)境影響因素也必須考慮,主要包括能見度、風速和氣壓[1,4]。因此,外部威脅、自身性能和環(huán)境因素三個方面共同構(gòu)成了無人機威脅的評估指標體系,如圖1所示。
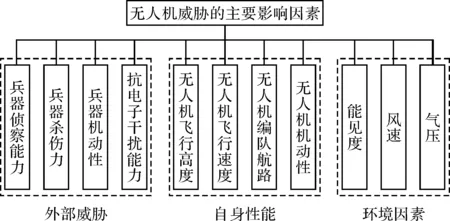
圖1 無人機威脅評估指標體系
評估指標體系的主要因素:
1) 兵器偵察能力:指地面?zhèn)刹煸O(shè)備對空中無人機進行跟蹤探測的威脅,如雷達、紅外探測器的偵察能力不同。
2) 兵器殺傷力:指地面火力兵器對無人機造成的殺傷力,比如一般情況下地對空導彈的殺傷力高于高炮。
3) 兵器機動性:指地面?zhèn)刹煸O(shè)備或火力兵器的使用靈活性,比如固定式、人工便攜式、車載等。一般情況下車載的機動性最大,人工便攜式次之,固定式最小。
4) 抗電子干擾能力:指地面兵器的隱蔽能力或利用電子設(shè)備有效防護,從而不被無人機發(fā)現(xiàn)的能力。抗電子干擾能力分為無、弱、中、強四種。
5) 無人機飛行高度:無人機與地面探測或火力兵器之間的距離越小,對無人機的威脅程度就越大;反之飛行高度越大,無人機被發(fā)現(xiàn)和攻擊的可能性越小,威脅程度越低。
6) 無人機飛行速度:無人機的飛行速度直接影響威脅的影響程度。通常,飛行速度越快,威脅程度越小,反之威脅程度就越大。
7) 無人機編隊航路:無人機編隊航路的不同對威脅評估影響不同。可分為最佳航路,較優(yōu)航路和一般航路。
8) 無人機的機動性:無人機自身機動性越好,威脅的影響越小;反之,越大。
9) 能見度:外界環(huán)境對無人機威脅的影響也很大,能見度越小,威脅越小;反之,越大。一般情況,晴天的能見度最大,陰天次之,雨天最差。
10) 風速:風速對無人機威脅的影響很大。風速越大,威脅越大,反之,越小。
11) 氣壓:氣壓越大,威脅越大,反之,越小。
3 優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)評估模型
隨著高新技術(shù)的發(fā)展,現(xiàn)代戰(zhàn)場中無人機面臨的威脅多種多樣、變化多端,因此評估模型應(yīng)具有不斷更新的能力,而BP神經(jīng)網(wǎng)絡(luò)正好滿足這一要求。BP神經(jīng)網(wǎng)絡(luò)是人工神經(jīng)網(wǎng)絡(luò)中一類非常重要、使用廣泛的網(wǎng)絡(luò)結(jié)構(gòu)。它最大的特點是類似于人腦具有自學習和自適應(yīng)能力,通過外界不斷輸入的樣本訓練最終達到理想的狀態(tài)。但是經(jīng)典的BP算法是基于梯度下降的方法,收斂速度慢,而且訓練過程中可能會陷入“局部極小”。因此有必要對此算法進行一定的優(yōu)化和改進。
本文采用遺傳算法(GA)對BP神經(jīng)網(wǎng)絡(luò)進行優(yōu)化,將BP算法中的梯度下降法與遺傳算法的全局尋優(yōu)的特點相結(jié)合。利用用遺傳算法在整個權(quán)值和閾值空間中進行粗略搜索,再采用梯度下降法進行局部的尋優(yōu),最終得到問題的全局最優(yōu)解[6,10]。基于遺傳算法的BP神經(jīng)網(wǎng)絡(luò)優(yōu)化模型如圖2所示。

圖2 基于遺傳算法的BP神經(jīng)網(wǎng)絡(luò)優(yōu)化模型
4 ISR無人機威脅評估仿真
4.1 構(gòu)建無人機威脅的BP神經(jīng)網(wǎng)絡(luò)模型
將無人機威脅的評估指標作為BP網(wǎng)絡(luò)的輸入節(jié)點,根據(jù)前面的分析,輸入節(jié)點數(shù)為11;威脅等級作為BP網(wǎng)絡(luò)輸出節(jié)點,輸出節(jié)點數(shù)為1;選取2層的隱含層,節(jié)點個數(shù)分別為7和5。利用Matlab神經(jīng)網(wǎng)絡(luò)工具箱進行建模訓練,表1為一組訓練樣本,表中的數(shù)據(jù)需要歸一化處理后作為BP網(wǎng)絡(luò)的實際訓練樣本。選取200組訓練樣本對BP網(wǎng)絡(luò)進行訓練。

表1 訓練樣本示例
4.2 無人機威脅的評估
訓練好的BP網(wǎng)絡(luò)可以用于實戰(zhàn)中無人機威脅的評估,輸入無人機獲取的地面兵器威脅參數(shù)、無人機自身性能參數(shù)和環(huán)境指標參數(shù),表2為無人機面臨的三組威脅。

表2 無人機威脅指標參數(shù)
將數(shù)據(jù)處理為樣本參數(shù)后作為BP網(wǎng)絡(luò)的輸入,經(jīng)訓練后得到輸出,即為威脅等級,如表3所示。

表3 無人機威脅等級
可見,威脅3對無人機的影響最大,威脅2次之,威脅1影響最小,在航路規(guī)劃時應(yīng)盡量避開威脅3和2,飛行時應(yīng)注意威脅1的行動。
5 結(jié)語
本文充分分析了無人機威脅評估的影響因素,構(gòu)建了陸戰(zhàn)場ISR無人機威脅指標體系。針對無人機威脅不斷更新的特點,選取具有自適應(yīng)、自學習能力的BP神經(jīng)網(wǎng)絡(luò)模型進行建模,針對傳統(tǒng)BP算法的缺點,利用具有全局搜索能力的遺傳算法對其進行優(yōu)化,獲得的優(yōu)化模型用于無人機威脅的評估。仿真結(jié)果符合一般的作戰(zhàn)經(jīng)驗和戰(zhàn)術(shù)原則,為陸戰(zhàn)場中ISR無人機的編隊模式和航路優(yōu)化提供了可靠依據(jù)。
[1] 李季,孫秀霞,馬強.無人機對空威脅算法與仿真[J].系統(tǒng)仿真學報,2008,20(16):4237-4240.
[2] 熊自明,萬剛,吳本材.基于改進蟻群算法的無人機低空突防三維航跡規(guī)劃[J].電光與控制,2011,18(12):44-48.
[3] 袁操,周德云.基于改進蟻群算法的無人機低空突防三維航跡規(guī)劃[J].電光與控制,2012,19(6):5-7.
[4] 粘松雷,林云,陳榕.基于改進BP算法的編隊空中威脅判斷模型研究[J].計算機與數(shù)字工程,2011,19(12):5-7.
[5] 李京,楊根源.基于神經(jīng)網(wǎng)絡(luò)的地面目標威脅度分析[J].兵工自動化,2012,31(3):15-18.
[6] 張發(fā)強,由大德,蔣敏.基于RBF神經(jīng)網(wǎng)絡(luò)的空襲目標威脅評估模型研究[J].艦船電子對抗,2010,33(6):20-24.
[7] 王曉梅,高江,王運行.低空突防威脅信息融合及航跡優(yōu)化[J].戰(zhàn)術(shù)導彈技術(shù),2010(3):23-26.
[8] 杜萍,郝琳.低空突防中探測威脅信息量化的一種實現(xiàn)方法[J].戰(zhàn)術(shù)導彈技術(shù),2006(1):57-60.
[9] 雷英杰,王寶樹,路艷麗.基于自適應(yīng)直覺模糊推理的威脅評估方法[J].電子與信息學報,2007,29(12):5-7.
[10] 馬海濤.基于神經(jīng)網(wǎng)絡(luò)和遺傳算法的威脅度估計算法[J].軍事運籌與系統(tǒng)工程,2005,19(3):72-74.
[11] 王俊,周樹道,葉松,等.融合遺傳算法與BP神經(jīng)網(wǎng)絡(luò)的氣象威脅度建模與評估[J].電光與控制,2012,19(3):73-77.
Threat Analysis and Simulation Model for ISR Unmanned Aerial Vehicle in The Land Battlefield
CHEN Juan1MA Tao2
(1. Army Officer Academy, Hefei 230031)(2. Electronic Engineering Institute, Hefei 230031)
The threat influence elements and its characters for ISR UAV in the land battlefield are analyzed. The target system of the threat simulation for ISR UAV is built. The BP ANN model is optimized by the genetic algorithm. The optimized BP network is used to simulate the threat for ISR UAV. The simulation result is practical and effective. It provides a reliable basis for UAV formation model and air route optimization in the land battlefield.
ISR UAV, threat, BP nerve network, genetic algorithm Class Number E87
2015年1月8日,
2015年2月27日 基金項目:國家自然科學基金(編號:71371187)資助。 作者簡介:陳娟,女,博士研究生,講師,研究方向:軍事運籌。馬濤,男,博士,講師,研究方向:網(wǎng)絡(luò)對抗。
E87
10.3969/j.issn1672-9730.2015.07.008
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03