多約束下鉸鏈力矩最優(yōu)俯沖制導(dǎo)方法*
2015-03-10 10:34:26劉魯華陳克俊
航天控制 2015年6期
程 勝 劉魯華 陳克俊
國(guó)防科學(xué)技術(shù)大學(xué)航天科學(xué)與工程學(xué)院,長(zhǎng)沙410073
高超聲速飛行器一般以高于5倍聲速飛行,大部分飛行空域處于臨近空間,相比傳統(tǒng)彈道式飛行器,具有響應(yīng)快速、突防能力強(qiáng)、高效摧毀和高機(jī)動(dòng)性等突出優(yōu)點(diǎn),受到各軍事強(qiáng)國(guó)高度重視[1]。其典型代表有CAV,HTV-2和AHW飛行器[2],該類(lèi)飛行器俯沖過(guò)程中基本處于高速飛行,并且通常要求快速俯沖,即俯沖段飛行航程很短,再加上大升阻比的構(gòu)型導(dǎo)致俯沖時(shí)調(diào)整姿態(tài)所需的旋轉(zhuǎn)力矩很大,從而給俯沖過(guò)程中姿態(tài)控制系統(tǒng)的舵偏轉(zhuǎn)帶來(lái)極大壓力,容易引起鉸鏈力矩過(guò)大[3]。鉸鏈力矩是作用在舵面上的氣動(dòng)力對(duì)舵鉸鏈產(chǎn)生的力矩[4],其過(guò)大將使舵系統(tǒng)面臨結(jié)構(gòu)破壞的潛在危險(xiǎn)。主要危害為:鉸鏈力矩增大使舵系統(tǒng)達(dá)到飽和,造成姿態(tài)控制系統(tǒng)性能迅速下降;另外,一旦引起舵鉸鏈結(jié)構(gòu)破壞,將導(dǎo)致整個(gè)飛行器失去控制。故鉸鏈力矩大小對(duì)于姿態(tài)控制系統(tǒng)實(shí)現(xiàn)效果影響極大。
對(duì)于舵而言,只要保證鉸鏈力矩的最大值不超限即可保證其正常工作。傳統(tǒng)降低鉸鏈力矩一般通過(guò)飛行器氣動(dòng)設(shè)計(jì)實(shí)現(xiàn),而對(duì)于不可變形飛行器,實(shí)際飛行過(guò)程中的氣動(dòng)構(gòu)型不可再調(diào),鉸鏈力矩?zé)o法減小,因此需要另辟蹊徑。目前,有關(guān)這方面的研究較少,只有文獻(xiàn)[3]有過(guò)研究。該文獻(xiàn)從彈道優(yōu)化的角度出發(fā),運(yùn)用Gauss偽譜法和序列二次規(guī)劃方法,設(shè)計(jì)鉸鏈力矩最小俯沖彈道。該方法在制導(dǎo)時(shí),需要事先生成鉸鏈力矩最小俯沖彈道,靈活性受到一定限制。
本文從推導(dǎo)解析制導(dǎo)律角度出發(fā),考慮如何降低飛行過(guò)程中的鉸鏈力矩。
1 鉸鏈力矩建模
鉸鏈力矩產(chǎn)生的機(jī)理為:作用在舵控制面上的控制力(通常為氣動(dòng)力)對(duì)舵鉸鏈軸產(chǎn)生的力矩。其大小可通過(guò)理論計(jì)算、工程估算或?qū)嶒?yàn)測(cè)試獲得。影響鉸鏈力矩的因素很多,為便于研究,主要考慮飛行攻角引起的上洗和舵偏角引起的面-面干擾[5],文獻(xiàn)[6]將鉸鏈力矩展開(kāi)為:
在制導(dǎo)中,可以利用瞬時(shí)平衡假設(shè)建立力矩等式。瞬時(shí)平衡假設(shè)是指不考慮姿態(tài)調(diào)整的動(dòng)態(tài)過(guò)程,認(rèn)為飛行器始終處于力矩平衡狀態(tài),對(duì)無(wú)動(dòng)力再入飛行器可表示為:
因此,可將鉸鏈力矩最小俯沖制導(dǎo)在縱平面內(nèi)轉(zhuǎn)化為法向過(guò)載最小俯沖制導(dǎo)。
同理,將式(3)在偏航平面內(nèi)展開(kāi),可將鉸鏈力矩最小俯沖制導(dǎo)在側(cè)平面內(nèi)轉(zhuǎn)化為側(cè)向過(guò)載最小俯沖制導(dǎo)。下面利用最優(yōu)控制理論求解過(guò)載最優(yōu)的解析制導(dǎo)律。
2 最優(yōu)制導(dǎo)律推導(dǎo)
2.1 最優(yōu)制導(dǎo)問(wèn)題建模
2.2 問(wèn)題求解
由于狀態(tài)方程為變系數(shù)線性微分方程,若直接求解此最優(yōu)制導(dǎo)問(wèn)題,將面臨難以求解的Riccati微分方程。一種較簡(jiǎn)便的解決思路是通過(guò)引入偽控制量,將變系數(shù)常微分方程轉(zhuǎn)化為常系數(shù)微分方程[10]。引入偽控制變量u1:

可見(jiàn),鉸鏈力矩最小制導(dǎo)律相對(duì)于純比例導(dǎo)引增加了加速度補(bǔ)償項(xiàng),并且導(dǎo)航比是時(shí)變的。
2.3 控制量解算
制導(dǎo)需要法向過(guò)載和側(cè)向過(guò)載為:
3 仿真分析
運(yùn)用文獻(xiàn)[12]中的三自由度模型,采用CAV-H飛行器總體和氣動(dòng)參數(shù),設(shè)置俯沖起點(diǎn)飛行速度2000m/s,高度 25km,俯沖起點(diǎn)經(jīng)緯度(1°,1°),目標(biāo)點(diǎn)經(jīng)緯度為(1.3°,1.3°),初始點(diǎn)速度傾角為0°,速度方位角為-40°,終端速度傾角γDF=-85°,攻角0≤α≤20°,最大過(guò)載20g。
仿真結(jié)果如圖1~5所示。圖1~3說(shuō)明該制導(dǎo)方法能在滿足終端落角約束的條件下精確命中目標(biāo),其終端位置偏差為0,終端落角偏差為0.02°。圖4~5表明攻角、傾側(cè)角指令變化平滑,無(wú)振蕩,反應(yīng)到過(guò)載上即為過(guò)載變化平緩,不會(huì)突然出現(xiàn)大過(guò)載,這從圖9和10的過(guò)載曲線(A1曲線)可以得到驗(yàn)證,從而鉸鏈力矩變化穩(wěn)定。
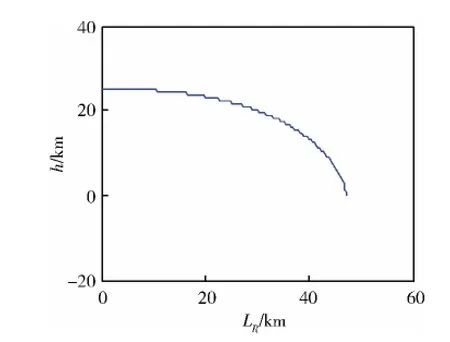
圖1 高度-射程曲線
為了重點(diǎn)驗(yàn)證該制導(dǎo)律降低過(guò)載的效果,在上面的仿真條件下,將其與式(29)的傳統(tǒng)最優(yōu)制導(dǎo)律[12]進(jìn)行仿真比較。
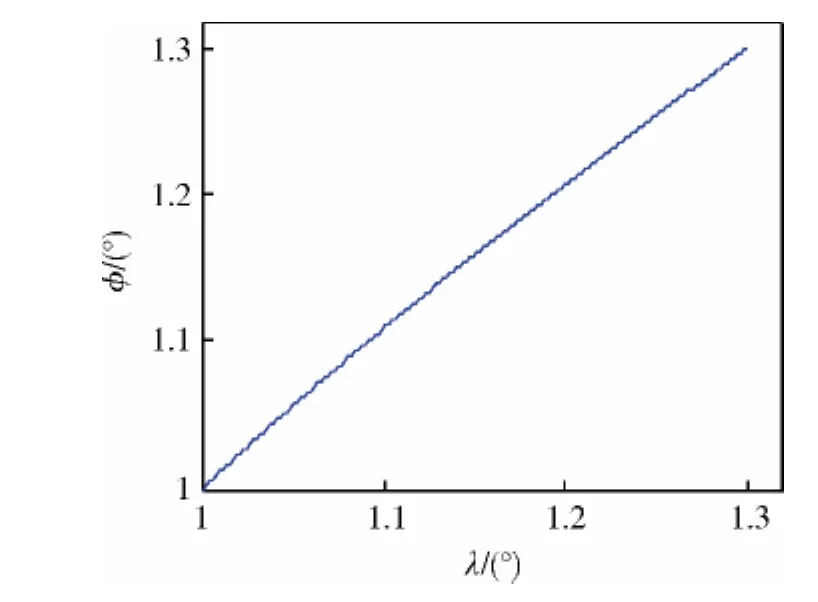
圖2 緯度-經(jīng)度曲線
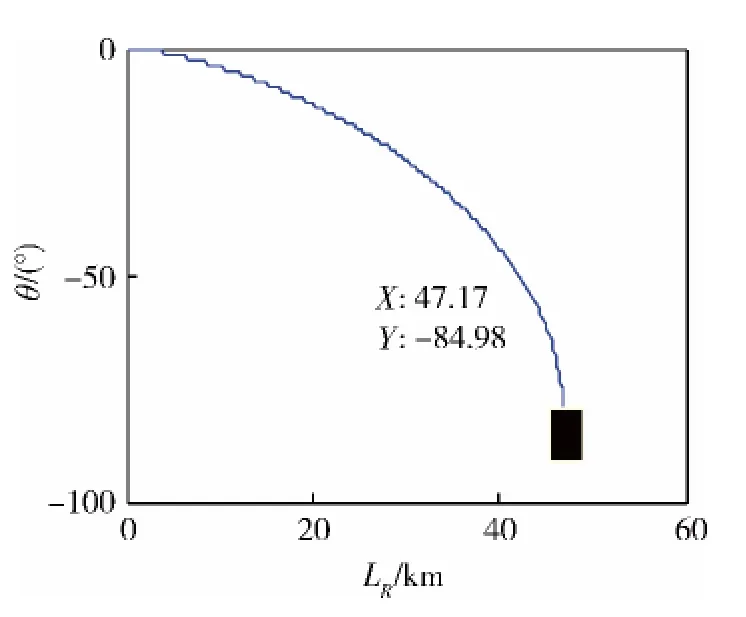
圖3 速度傾角-射程曲線
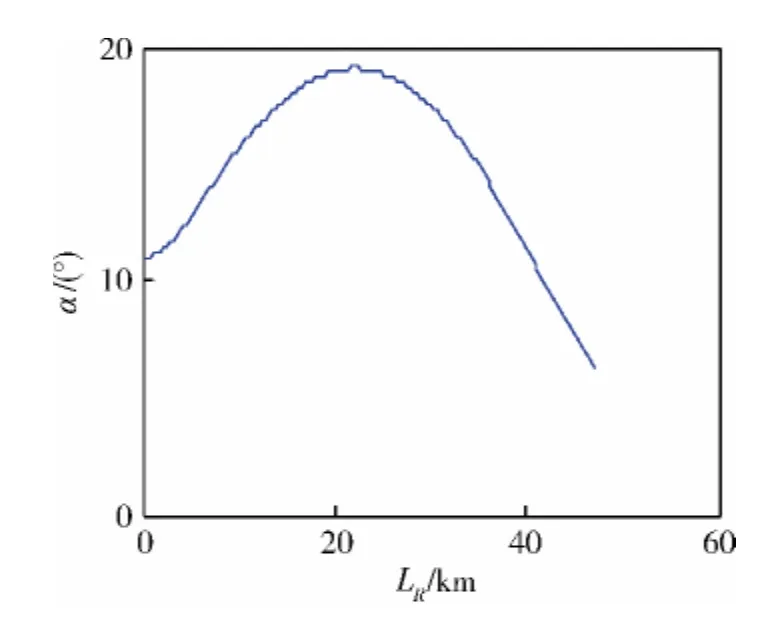
圖4 攻角-射程曲線
仿真結(jié)果如圖6~10所示,圖中的A1代表鉸鏈力矩最優(yōu)制導(dǎo),A2代表式(29)的最優(yōu)制導(dǎo)。由仿真結(jié)果可以看出,鉸鏈力矩最優(yōu)制導(dǎo)與式(29)最優(yōu)制導(dǎo)獲得的導(dǎo)引彈道基本相同,都在滿足終端落角約束的條件下精確命中目標(biāo),但法向過(guò)載峰值和側(cè)向過(guò)載峰值有明顯不同。鉸鏈力矩最優(yōu)制導(dǎo)的法向過(guò)載峰值由式(29)最優(yōu)制導(dǎo)的13.29g降為11.03g,側(cè)向過(guò)載峰值由2.62g降為2.48g。由于式(10)中的系數(shù)絕對(duì)值遠(yuǎn)遠(yuǎn)大于1,可以認(rèn)為過(guò)載小幅減小便會(huì)引起鉸鏈力矩大幅度降低,可見(jiàn)本方法的鉸鏈力矩最大值會(huì)大大的降低。
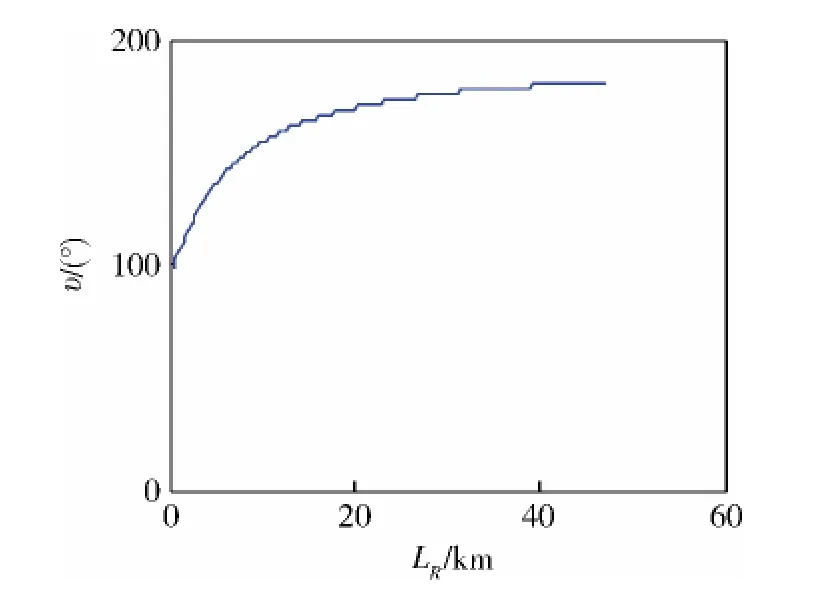
圖5 傾側(cè)角-射程曲線
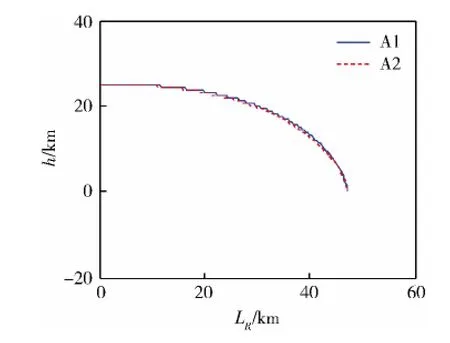
圖6 高度-射程曲線
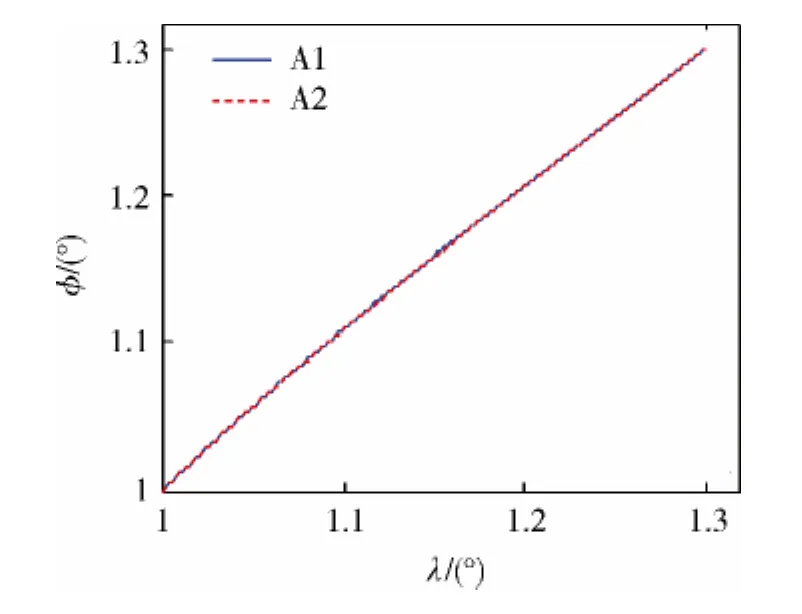
圖7 緯度-經(jīng)度曲線
為了進(jìn)一步驗(yàn)證本方法具有降低鉸鏈力矩的能力,將不同的初始偏差、過(guò)程偏差和終端約束偏差下的過(guò)載與傳統(tǒng)最優(yōu)制導(dǎo)進(jìn)行比較。初始偏差取高度偏差Δh=±1 km,速度偏差Δv=±100 m/s,速度傾角和速度方位角偏差Δθ=Δσ =±2°;過(guò)程偏差取阻力系數(shù)偏差、升力系數(shù)偏差和大氣密度偏差為ΔCD=ΔCL=Δ ρ=15%;終端約束偏差取落點(diǎn)偏差 Δφ=Δλ=±0.1°,落角偏差ΔγDF= ±5°。
圖8 速度傾角-射程曲線
圖9 法向過(guò)載-射程曲線
圖10 側(cè)向過(guò)載-射程曲線
結(jié)果見(jiàn)表1,表中A1和A2的含義同上文。表中數(shù)據(jù)表明,無(wú)論在何種偏差下,本方法的法向過(guò)載和側(cè)向過(guò)載都小于傳統(tǒng)的最優(yōu)制導(dǎo)律,從而證明鉸鏈力矩能得到有效降低,體現(xiàn)了鉸鏈力矩最小最優(yōu)制導(dǎo)的優(yōu)勢(shì)。
表1 不同偏差下的過(guò)載大小情況
4 結(jié)束語(yǔ)
針對(duì)高超聲速飛行器俯沖段鉸鏈力矩過(guò)大問(wèn)題,從制導(dǎo)的角度研究了使鉸鏈力矩降到最小的方法。根據(jù)鉸鏈力矩的產(chǎn)生機(jī)理,將問(wèn)題轉(zhuǎn)化為求過(guò)載最小。在終端落點(diǎn)和終端落角約束的要求下建立最優(yōu)問(wèn)題模型,根據(jù)最優(yōu)控制原理推導(dǎo)出解析形式的最優(yōu)制導(dǎo)律。仿真驗(yàn)證該制導(dǎo)律能明顯降低鉸鏈力矩,且形式簡(jiǎn)單,可以為高超聲速飛行器俯沖段制導(dǎo)控制系統(tǒng)的設(shè)計(jì)提供參考。另外,本文在制導(dǎo)時(shí)并未考慮對(duì)終端速度大小的控制,下一步將研究復(fù)雜約束下的鉸鏈力矩最小制導(dǎo)方法。
[1] Xu Mingliang,Chen Kejun,Liu Luhua,et al.Quasi-equilibrium glide adaptive guidance for hypersonic vehicles [J].Science China:Technological Sciences,2012,55(3):856-866.
[2] 韓洪濤,王友利.2013年國(guó)外高超聲速技術(shù)發(fā)展回顧[J]. 中國(guó)航天,2014(3):16-20.(Han Hongtao,Wang Youli.Hypersonic Technology Development Retrospect of External in 2013[J].Aerospace China,2014,(3):16-20.)
[3] 徐明亮,劉魯華,湯國(guó)建,陳克俊.高超聲速臨近空間飛行器鉸鏈力矩最小俯沖彈道設(shè)計(jì)[J].彈道學(xué)報(bào),2011,23(3):1-6.(Xu Mingliang,Liu Luhua,Tang Guojian,et al.Design of dive ttajectory of hypersonic near-space vehicle with minimun hinge moment[J].Journal of Ballistics,2011,23(3):1-6.)
[4] 吳宗成,朱自強(qiáng),丁寧,等.三維副翼鉸鏈力矩計(jì)算[J].航空學(xué)報(bào),2007,28(3):519-526.(Wu Zongcheng,Zhu Ziqiang,Ding Ning,et al.Calculation of hinge moments of 3-D aileron [J].Acta Aeronautica et Astronautica Sinica,2007,28(3):519-526.)
[5] 汪令羽.全動(dòng)控制舵鉸鏈力矩計(jì)算方法研究[J].北京理工大學(xué)學(xué)報(bào),1996,16(4):444-449.(Wang Lingyu.A method for the hinge moments of all-movable controls[J].Journal of Beijing Institute of Technology,1996,16(4):444-449.)
[6] Yoonsu Nam,Jinyoung Lee,Sung Kyung Hong.Force Control System Design for Aerodynamic Load Simulator[C].Proceedings of the American Control Conference.Chicago,2000.
[7] 魯建,李邦清,劉永遠(yuǎn).一種用舵反饋信號(hào)計(jì)算鉸鏈力矩的方法[J].戰(zhàn)術(shù)導(dǎo)彈與控制技術(shù),2006,52(1):84-85.(Lu Jian,Li Bangqing,Liu Yongyuan.A calculation method of hinge moments used feedback signal of rudder[J].Tactical Missile and Control Technology,2006,52(1):84-85.)
[8] 耿建中,曹燚,段辰龍,等.具有速率限制的民機(jī)舵面實(shí)時(shí)鉸鏈力矩特性研究[J].系統(tǒng)仿真技術(shù),2014,10(1):58-62.(Geng Jianzhong,Cao Yi,Duan Chenlong,et al.research on the real time hinge moment of the control surfaces with rate limiting of civil aircraft[J].System Simulation Technology,2014,10(1):58-62.)
[9] 趙漢元.飛行器再入動(dòng)力學(xué)和制導(dǎo)[M].長(zhǎng)沙:國(guó)防科技大學(xué)出版社,1997.(Zhan Hanyuan.Vehicle Reentry Dtnamics and Guidance[M].Changsha:Press of National University of Defense Technology,1997.)
[10] 連葆華,崔平遠(yuǎn),崔祜濤.一種改進(jìn)的最優(yōu)制導(dǎo)律及其仿真研究[J].飛行力學(xué),2001,19(3):36-40.(Lian Baohua,Cui Pingyuan,Cui Hutao.An improved optimal guidance law and Its simulation study [J].Flight Dynimics,2001,19(3):36-40.)
[11] 趙紅超,王鳳蓮,顧文錦.超音速反艦導(dǎo)彈的最優(yōu)末制導(dǎo)律研究[J].航空兵器,2005,(3):8-10.(Zhao Hongchao,Wang Fenglian,Gu Wenjin.Research on optimal terminal guidance law for supersonic ant-ship missile[J].Aero Weaponry,2005,(3):8-10.)
[12] 陳克俊,趙漢元.一種適用于攻擊地面固定目標(biāo)的最優(yōu)再入機(jī)動(dòng)制導(dǎo)律[J].宇航學(xué)報(bào),1994,15(l):1-7.(Chen Kejun,Zhao hanyuan,An Optimal Reentry Maneuver Guidance Law Applying to Attack the Ground Fixed Target[J].Journal of Astronautics,1994,15(l):1-7.)
