基于Popov超穩定性的TVC系統在線辨識及補償方法
2015-03-10 10:34:18曾凡銓崔業兵
航天控制 2015年6期
陳 童 曾凡銓 崔業兵
上海航天控制技術研究所,上海200233
永磁同步電機以其低慣性、快響應以及高功率密度的特點在航天領域得到了越來越廣泛的應用[1]。新一代固體捆綁運載火箭的推力矢量控制(TVC)采用大功率內嵌式永磁同步電機(IPMSM)驅動的電動伺服系統,空間矢量控制采用最大轉矩電流比(MTPA)方案。
TVC系統控制的核心在于伺服電機的控制,其電磁環境復雜,且環境溫度變化范圍為 -40~120℃[2]。在該運行環境下,伺服電機參數攝動問題嚴重,其中定子相電阻和交、直軸電感的變化影響輸出力矩的穩定性和精確度。因此,需要構建控制器自校正系統,以減小電機參數攝動給控制效果帶來的不利影響。
由于IPMSM穩態方程欠秩,若不增添補償方程,在線辨識算法無法精確跟蹤時變參數。本文通過分析欠秩問題,提出了一種利用回歸分析建模的補償方案,并基于Popov超穩定性理論,設計了模型參考自適應(MRAS)在線辨識自適應律。該辨識方法利用離線辨識數據,通過兩步辨識,擺脫了對數據手冊上的參數設計值的依賴,同時減小了在線辨識的運算量。
1 IPMSM數學模型
經過Clarke變換及Park變換,將三相固定坐標系轉換為兩相旋轉坐標系,得到解耦后的IPMSM交、直電流狀態方程為:
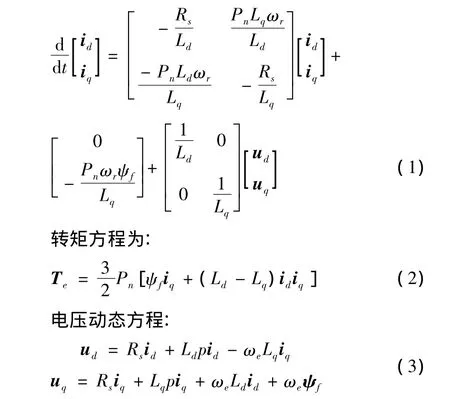
式中,Rs為定子電阻;Ld,Lq分別為直、交軸電感;id,iq分別為直、交軸電流;ud,uq分別為直、交軸電壓;ψf為轉子永磁體產生的磁勢;ωe為轉子電角速度;ωr為轉子機械角速度;p為微分算子;Pn為極對數,Te為電磁轉矩。
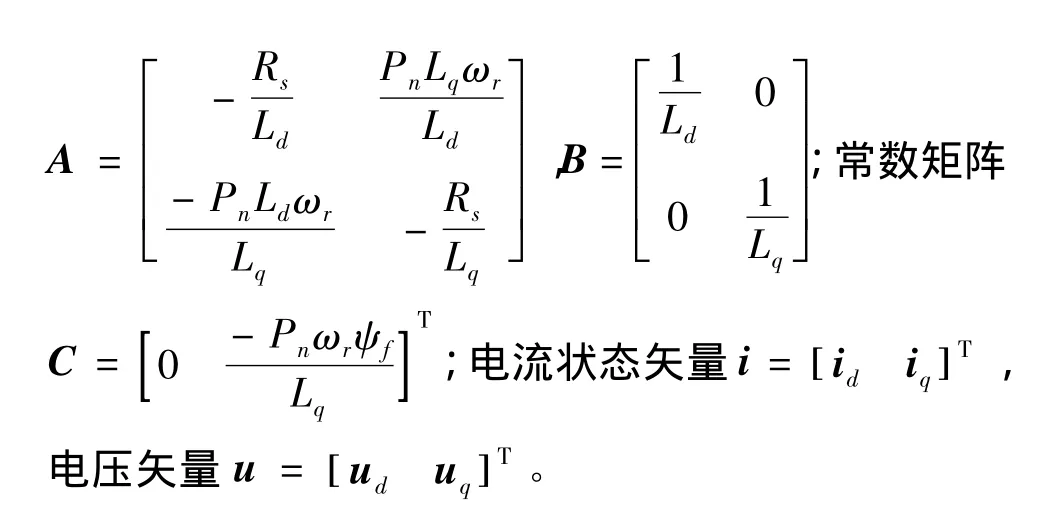
式(1)中,IPMSM伺服系統系數矩陣
2 穩態方程欠秩問題分析
當IPMSM穩態運行,且鐵損和渦流損耗忽略不計時,在離散域可以簡化為:

針對火箭伺服系統的特定工作環境,考慮到定子相電阻與永磁體磁鏈的變化與溫度近似呈現線性關系,而交、直軸電感與繞組電流呈現非線性關系。將待辨識參數分組,考慮先將Ld,Lq設置成離線辨識出的初始值,對受溫度影響較大的第1組參數(Rs,ψf)首先進行在線辨識,在不同初始參數值及溫度變化區間內,統計電阻和磁鏈的參數值。利用回歸分析,擬合出電阻和磁鏈隨溫度變化的回歸方程,作為第2組參數 (Ld,Lq)在線辨識的補償方程,以解決IPMSM在線辨識的穩態方程欠秩問題。
3 MRAS在線辨識算法設計
本節基于Popov超穩定性理論,通過參考模型和可調模型輸出電流的比較并計算誤差,對伺服電機各主要參數的在線辨識自適應律進行設計,并給出了相電阻和轉子磁鏈的回歸模型,在線辨識系統如圖1所示。
3.1 Popov前向通道補償
內嵌式永磁同步電機MRAS辨識系統如圖2所示。基于Popov超穩定性理論,將可調模型作為前向通道,以自適應律作為反饋通道。
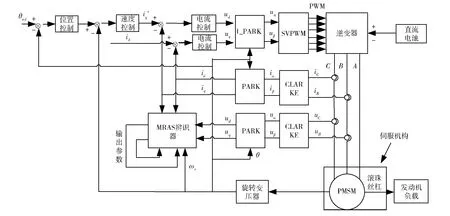
圖1 在線參數辨識系統框圖
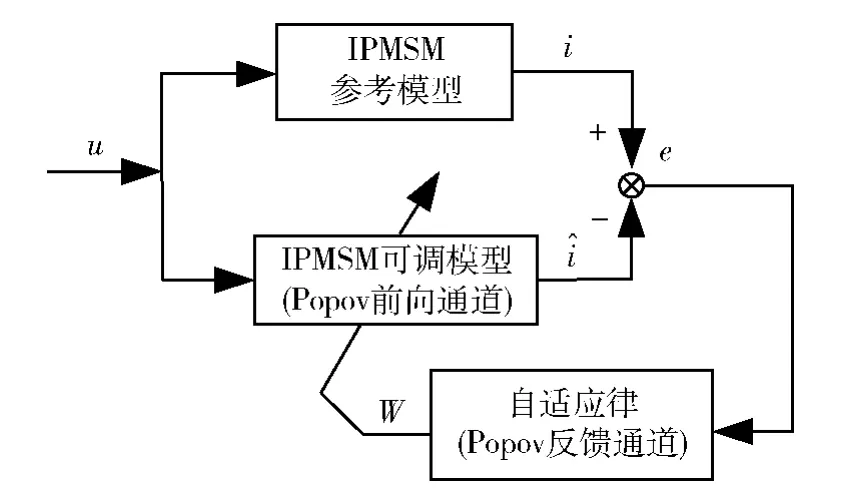
圖2 MRAS辨識系統原理圖
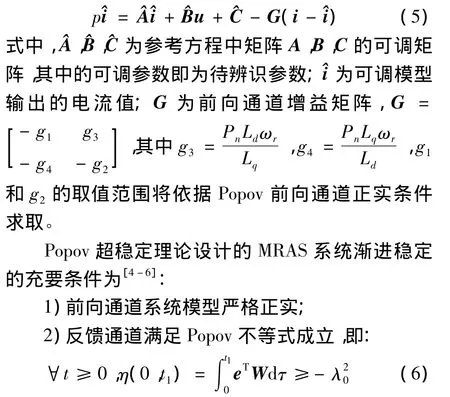
式(1)即為IPMSM參考模型的狀態空間方程,IPMSM可調模型為:
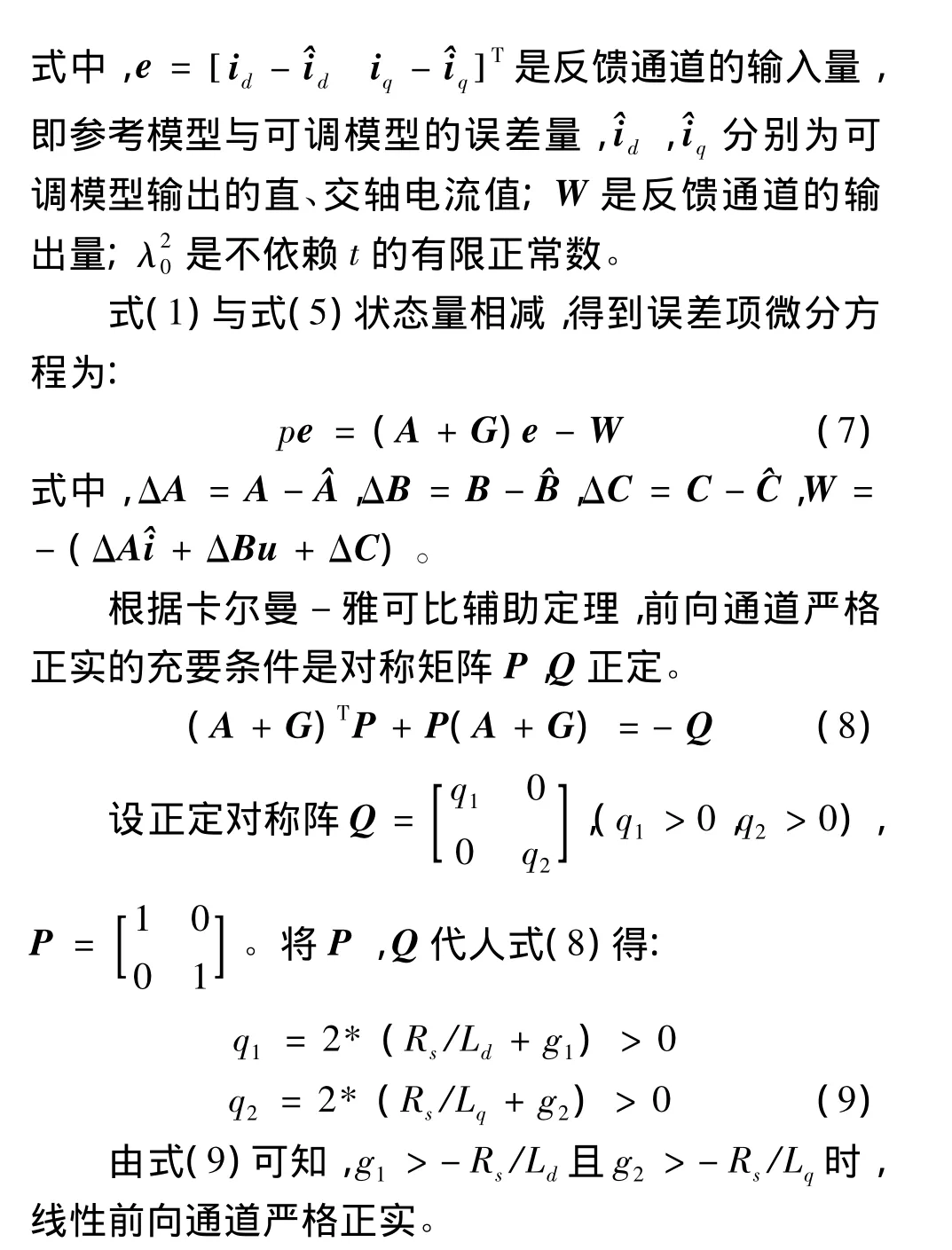
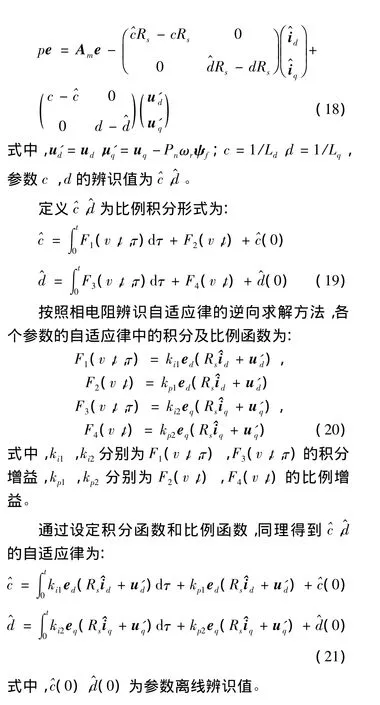
3.2 基于Popov超穩定性自適應律設計
設計相電阻自適應律,應滿足Popov的穩定性條件,其誤差項微分方程:


4 電阻、轉子磁鏈辨識數據回歸模型
根據記錄的在線辨識數據,采用回歸分析的方法求解出相電阻和轉子磁鏈的回歸方程,本文采用高斯-牛頓法對相電阻、磁鏈的在線辨識數據進行回歸分析。
通過求解電阻溫升系數、轉子磁鏈退磁系數,從而求出回歸方程,作為交、直軸電感的在線辨識的補償方程。
相電阻和轉子磁鏈的回歸模型分別為:

式中,x為在線辨識的溫度,y為離線辨識的溫度;α,β分別為需求解的電阻溫升系數和退磁系數。
5 試驗結果分析
試驗電機主要參數準確值如表1所示,試驗驗證基于Popov超穩定性在線辨識及補償效果。對各個試驗溫度的辨識結果進行記錄,以溫度40℃情況為例說明。

表1 試驗電機參數準確值(40℃)
相電阻及轉子磁鏈的辨識曲線如圖3和4所示。在線辨識的初值設定為各參數的離線辨識值,能夠幫助在線辨識快速收斂于實際值,減小振蕩過程及程序運算負擔。通過觀測相電阻及轉子磁鏈辨識曲線,隨著交軸電流的增大到一個穩定值,參數估算值經過0.2s收斂于真實值,辨識過程平穩,結果較為準確。
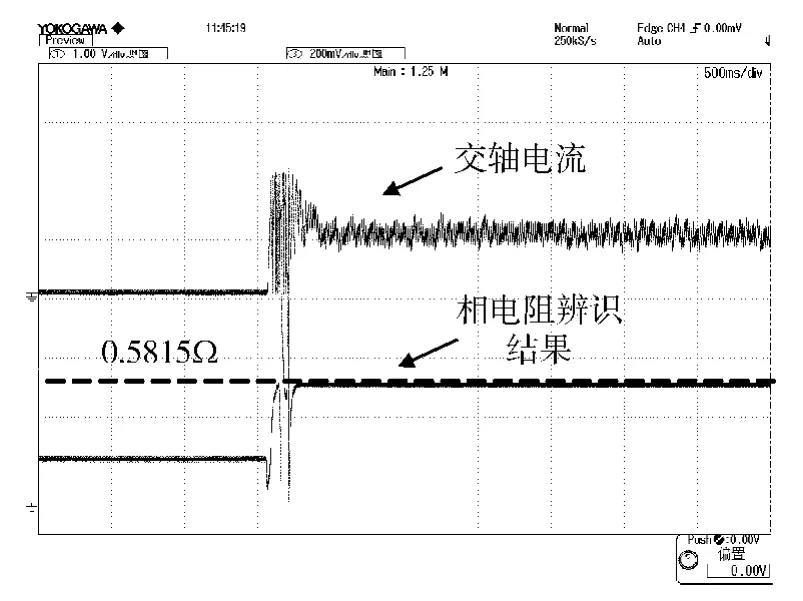
圖3 相電阻辨識曲線(40℃)
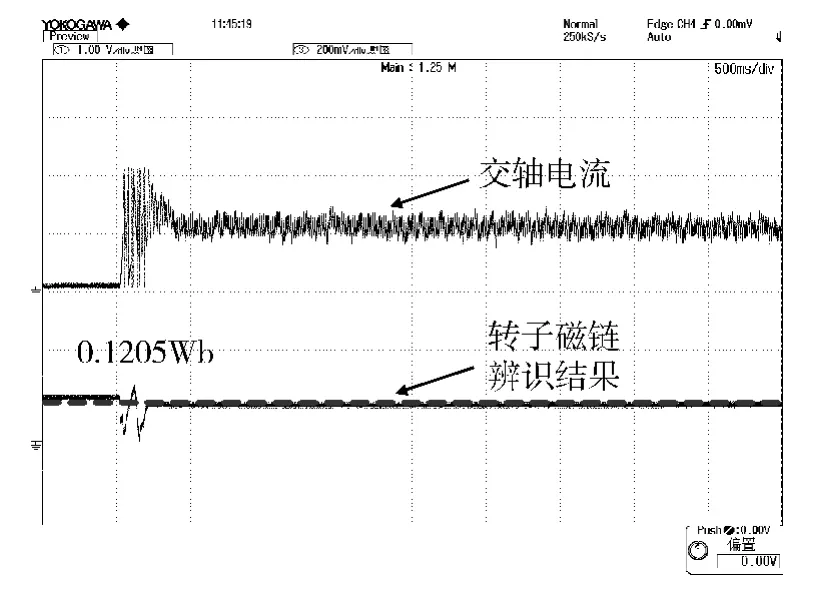
圖4 轉子磁鏈辨識曲線(40℃)
對辨識試驗結果以10℃為步長統計,在溫度區間(10~80)℃內,辨識相電阻Rs和轉子磁鏈ψf的辨識結果如表2和3所示。

表2 相電阻在線辨識結果

表3 轉子磁鏈在線辨識結果
根據表2和3的數據,擬合出試驗所用IPMSM相電阻Rs的溫度系數α為0.004041,轉子磁鏈ψf的溫度系數為-0.0001015.將計算出的溫度系數代人式(20)中,作為欠秩問題的補償方程,用四階滿秩方程進行交、直軸電感Ld,Lq的辨識,在線辨識時相電阻Rs和轉子磁鏈ψf的值由查表的方法獲得,得到的交、直軸電感Ld,Lq在40℃的辨識波形如圖5和6所示,結果經過約0.15s后收斂。
試驗結果表明,IPMSM主要參數估算值與參數準確值相吻合,達到了辨識目的。
6 結論
針對新一代電動TVC系統主要參數,進行了在線辨識及補償方法進行研究,設計了基于Popov超穩定性理論的自適應參數辨識方案。針對空間矢量控制下的穩態方程欠秩問題,提出利用回歸分析進行欠秩補償,通過兩步法辨識伺服電機時變參數。經過試驗驗證,該方法辨識結果穩定且準確度較高,為系統參數的自校正提供了算法基礎,實現了MTPA狀態下的滿秩在線辨識。
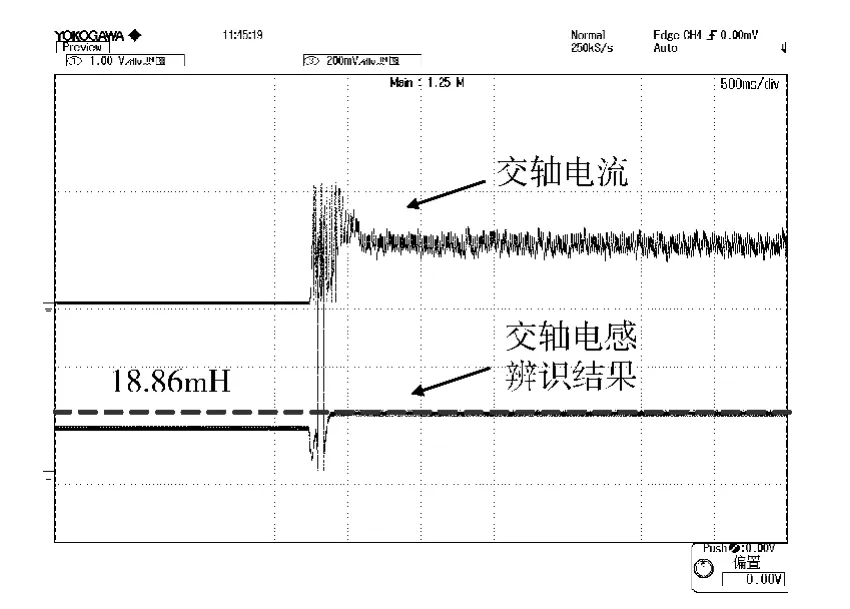
圖5 交軸電感辨識曲線(40℃)
[1] 石立.載人航天高可靠伺服技術[J].導彈與航天運載技術,2002,(5):49-52.(Shi Li.High reliable servo technology for manned space [J].Missiles and Space Vehicles,2002,(5):49-52.)
[2] 曾廣商,沈衛國,石立,等.高可靠三冗余伺服機構系統[J].航天控制,2005,23(1):35-40.(Zeng Guangshang,Shen Weiguo,Shi Li,et al.High-reliability triple redundancy servomechanism system[J].Aerospace Control,2005,23(1):35-40.)
[3] Rash M,Macconnell P F A,Stronach A F,et al.Sensorless indirect-rotor-field-orientation speed control of a permanent magnet synchronous motor with stator-resistance estimation[J].IEEE Transaction on Industrial Application,2007,54(3):1667-1673.
[4] 沈艷霞,劉永欽.基于改進型模型參考自適應的PMSM參數辨識[J].電氣傳動,2009,39(5):47-50.(Shen Yanxia,Liu Yongqin.Identification of PMSM based on improved model reference self-adaptive algorithm[J].E-lectric Drive,2009,39(5):47-50.)
[5] Boileau T,Nahid-Mobarakeh B and Meibody-Tabar F.On-Line Identification of PMSM Parameters:Model-Reference vs.EKF[C].Proceedings of the IEEE Industry Applications Society Annual Meeting.2008:1-8.
[6] M.Rahman,Khwaja,Silva Hiti.Identification of machine parameters of a synchronous motor[J].IEEE Transactions on Industry Applications.2005,41(2):557-565.
