攻擊時間約束下的三維制導律
2015-03-10 07:01:17劉遠帆
導航定位與授時 2015年6期
王 健,劉遠帆,史 震
(哈爾濱工程大學 自動化學院,哈爾濱150001)
?
攻擊時間約束下的三維制導律
王 健,劉遠帆,史 震
(哈爾濱工程大學 自動化學院,哈爾濱150001)
基于三維空間內導彈-目標的相對運動方程,針對固定目標,提出了一種攻擊時間約束下的多導彈協同攻擊的三維制導律。俯仰通道設計了滑模變結構制導律,偏航通道基于動態逆控制理論,采用機動控制,調整導彈的攻擊時間,使其趨于指定值,并與在俯仰通道采用推導的增廣比例制導律作了比較。最后,仿真結果表明,該制導律最終能使攻擊的剩余時間誤差趨于零,能夠滿足對制導精度和攻擊時間的要求,證明了算法的正確性和優越性。
攻擊時間約束;動態逆控制;滑模變結構;增廣比例;制導律
0 引言
當多導彈協同攻擊同一目標時,為了提高導彈的突防能力,通常采用飽和攻擊戰術,需要對導彈的攻擊時間進行精確的控制。文獻[1]基于線性化的彈目相對運動方程,采用最優控制的方法來調節反饋的攻擊時間誤差(即比例導引律預測的攻擊時間與指定的攻擊時間之差),實現了對攻擊時間的控制。文獻[2]在制導指令中引進了一個含有3個未知系數的擴充多項式,來分別決定導彈的攻擊時間、攻擊角度和脫靶量,同時實現了導彈對攻擊時間和角度的要求。文獻[3]提出了一種兩階段控制的方法,來同時控制撞擊時間和撞擊角度,第一階段對時間精控和角度粗控;第二階段實現對角度的精確控制。
本文提出了攻擊時間約束下打擊固定目標的三維制導律。通過對彈目運動方程的分析,在俯仰通道采用滑模變結構控制,在偏航通道采用動態逆控制,保證在擊中目標的同時,調節導彈的攻擊時間,使其趨于指定值,實現多導彈的協同攻擊,并與將俯仰通道的控制量修改為推導的增廣比例制導律作比較,證明了算法的優越性。
1 三維導引問題描述
導彈和目標都看作質點,目標靜止且導彈恒速運動,導彈和目標的相對運動關系如圖1所示。
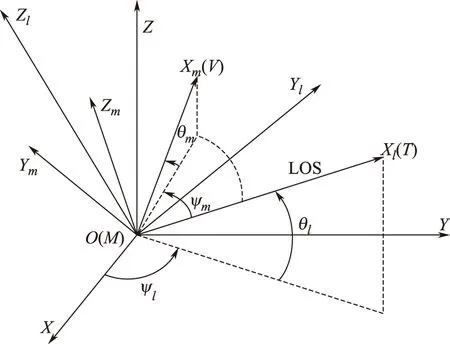
圖1 導彈和目標的相對運動關系Fig.1 Engagement geometry of missile and target
在圖1中,XYZ表示參考坐標系,XlYlZl表示視線坐標系,XmYmZm表示彈體坐標系,R表示彈目距離,V表示導彈的速度并且是常值;θm和ψm分別是導彈速度矢量相對視線坐標系的高低角和方位角,θl和ψl分別是彈目視線角(LOS)相對參考坐標系的高低角和方位角。Aym和Azm分別為導彈的偏航和俯仰的加速度指令。導彈相對目標的動力學運動方程[4]:
(1)
(2)
(3)
(4)
(5)
(6)
用Td表示指定的攻擊時間,t為時間變量,則期望的剩余攻擊時間tgo可以表示為
tgo=Td-t
(7)
則攻擊時間誤差et可以表示為
(8)
2 攻擊時間約束的制導律設計
在本節,對導彈俯仰和偏航通道的控制指令分別進行設計,使其在指定的時間命中目標。在偏航通道,依據動態逆控制理論,設計相應的制導律使導彈的剩余時間誤差et趨于零;在俯仰通道,分別依據變結構和李雅普諾夫穩定理論,設計了相應的變結構制導律和增廣的比例制導律。
2.1 動態逆制導律的設計[5]
為了通過對偏航通道的控制來調節攻擊時間,在本節,偏航通道采用了動態逆控制。
對式(8)求導,并結合式(1)、式(6)~式(8),可得
(9)

(10)
期望的慢子系統可以定義為
(11)
(12)

(13)
d1可以用式(14)表示
(14)

(15)
對式(15)兩邊求導,結合式(9),可得
(16)

(17)

(18)
2.2 滑模變結構制導律的設計[6-7]
對式(2)的兩邊求導,并將式(4)代入可得:
(19)
(20)
(21)
同理對式(3)的兩邊求導,并將式(5)代入可得:
(22)
(23)
(24)
在俯仰通道上,選取滑模面為
(25)
對式(25)求導可得
(26)
為了保證系統的狀態能夠到達滑模面,并且具有良好的動態特性,在俯仰通道采用自適應滑模趨近律
(27)
綜合上面各式可以得到俯仰通道的加速度指令Azm1
(28)
同理,對于偏航通道,選取滑模面和趨近律分別為:
(29)
(30)
其中,K2、ε2>0且為常數。代入可以得到偏航的加速度指令Aym1
(31)
2.3 增廣比例制導律的設計
(32)
(33)
(34)
根據李雅普諾夫穩定性理論,選取李雅普諾夫函數為:
(35)
(36)
(37)
對式(35)的兩邊求導并將式(36)和式(37)代入可得
(38)
根據式(38),選取增廣比例制導律中俯仰通道的控制量Azm2和偏航通道的控制量Aym2分別為:
(39)
(40)
其中,N1>1,N2>1,將式(39)和式(40)代入式(38),可以得到
(41)
3 仿真實例和分析
3.1 攻擊時間約束下的制導律的仿真和分析
在本節,俯仰通道采用2.2節的滑模變結構控制,得到俯仰通道的控制量Azm1,而在偏航通道則采用2.1節的動態逆控制,得到偏航通道的制導指令Aym。假設四枚導彈同時攻擊同一個固定的目標,仿真的初始參數見表1。指定的攻擊時間設置為40s,控制器的其他的仿真參數d2=k1=10,c1=c2=0.9,δ=0.01,ε1=0.02,仿真步長設置為Δt=0.001s,導彈最大的法向過載設置為8g。仿真結果如圖2和圖3所示。
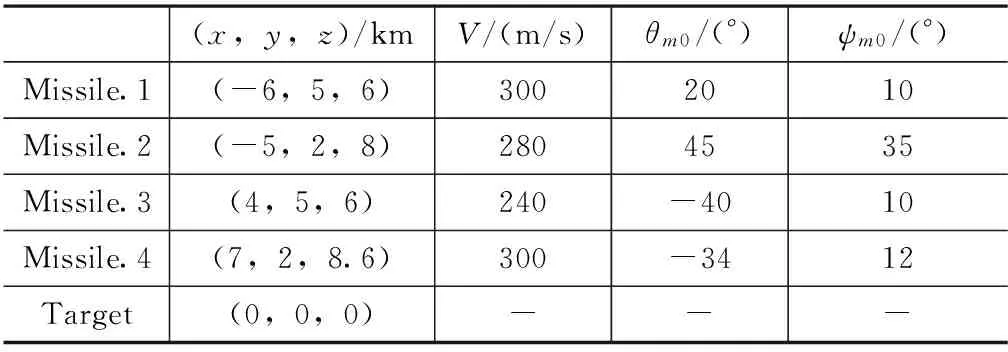
表1 仿真的初始參數Tab.1 Initial conditions of the missiles engagement

圖2 三維的彈道軌跡和導引時間Fig.2 3-D Trajectories and guidance time by impact time constrained control

圖3 四發導彈協同攻擊下的彈目距離Fig.3 Relative distances between the target and missile in four missiles cooperative attack
在圖2中,比較陡直的曲線是導彈的俯仰和偏航通道采用2.2節推導的滑模變結構制導律下生成的,可以看出,各個導彈擊中目標的時間不同,而彈道比較彎曲的曲線是采用本節的制導律下生成的,結合圖3表明,雖然仿真的初始條件不同,但是四枚導彈在所設計制導律的導引下都能在指定的攻擊時間40s時命中同一目標,相應的Missile1~Missile4各個導彈的脫靶量分別為0.3000m、0.2800m、0.2400m和0.3000m,脫靶量的誤差在1m以內,因此導彈在攻擊時間約束的同時實現了對目標的精確打擊,證明了算法的正確性和有效性。
3.2 攻擊時間約束下的制導律的比較
在3.1節中,俯仰通道采用滑模控制,偏航通道采用的是動態逆控制,稱為方法1;而將俯仰通道控制量改換為2.3節推導的增廣比例制導律中相應的控制量Azm2,而偏航通道仍采用的是2.1節所推導的偏航通道的控制量Aym,稱為方法2,將兩種方法通過仿真進行比較。
以某空對地導彈為例,攻擊的目標為固定的,導彈的初始位置坐標為(-6,5,6)km,目標的位置坐標為(0,0,0)km,導彈的速度為V=300m/s,初始的高低角θm0=20°,方位角ψm0=15°,指定的攻擊時間設置為42s,k1=15,N1=15,d2=10,c1=c2=0.9,仿真步長設置為Δt=0.001s,δ=0.01,ε1=0.02,導彈最大的法向過載設置為8g,仿真結果如圖4~圖9所示。

圖4 三維的彈道軌跡Fig.4 3-D trajectories
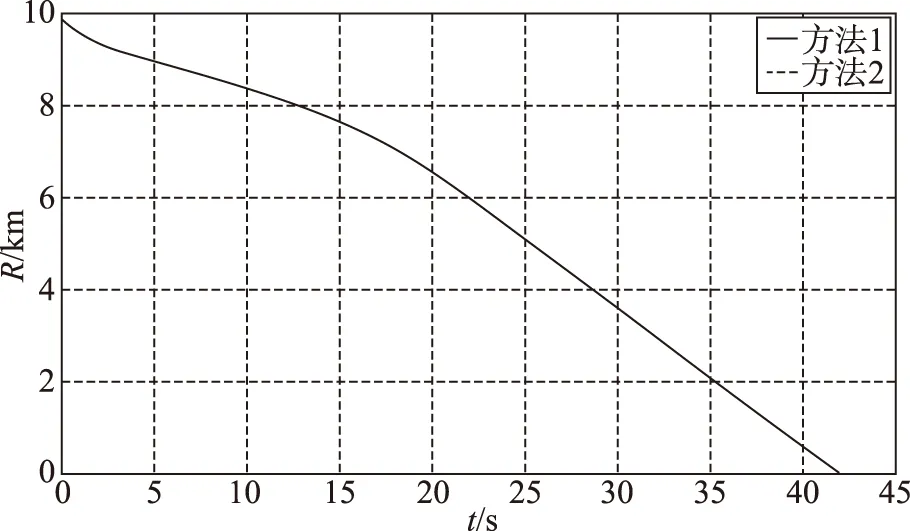
圖5 彈目之間的相對距離Fig.5 Relative distances between the target and missile

圖6 前置角的變化曲線Fig.6 Curves of heading angles
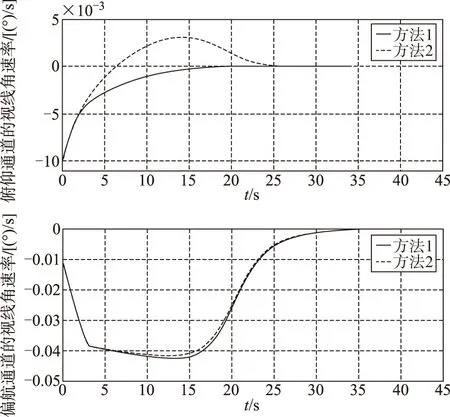
圖7 視線角速率的變化曲線Fig.7 Curves of line-of-sight angle rate
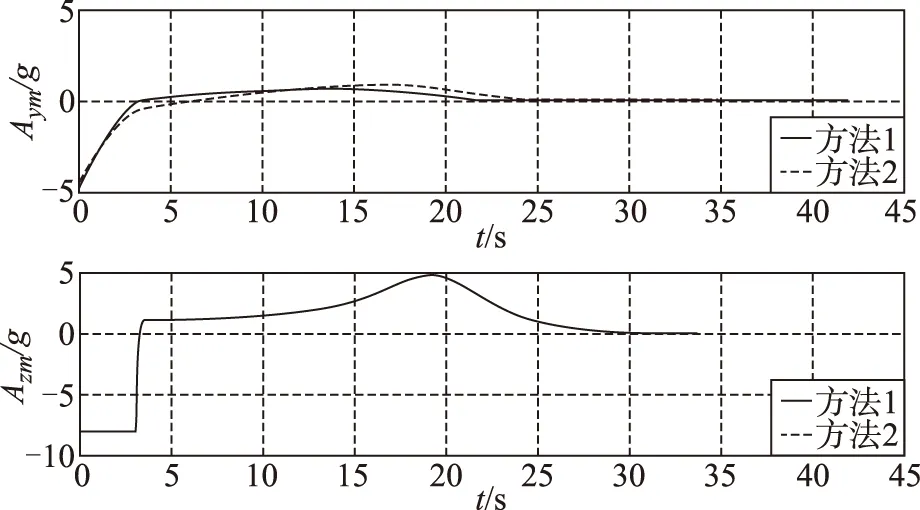
圖8 加速度的變化曲線Fig.8 Curves of missiles’ acceleration
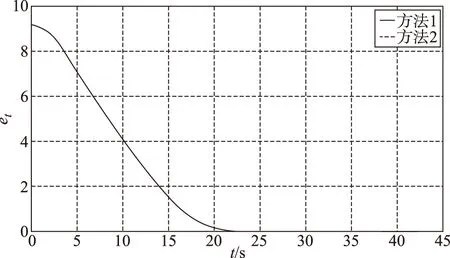
圖9 攻擊時間誤差的變化曲線Fig.9 Curves of time-to-go error
由圖9可知,導彈的攻擊時間誤差最終收斂到零,結合圖4和圖5表明,導彈在這兩種制導律的導引下都能在指定的攻擊時間42s時命中目標,方法1的脫靶量為0.2166m,方法2的脫靶量為0.8152m,則說明方法1在俯仰通道采用滑模的控制方法有更高的制導精度。圖5和圖9還可以看出,兩種導引方法下的彈目距離和導彈的攻擊時間誤差曲線幾乎重合,這是因為它們的曲線主要取決于偏航通道的機動控制指令,而這兩種導引方法下偏航通道的制導指令是一樣的。
在圖4中,由于偏航通道都采用的是動態逆控制,則在兩種方法的導引下,導彈在導引前期由于要通過較大的機動來調節飛行時間,所以彈道比較彎曲,而在導引后期,機動較小,彈道比較平直。如圖8所示,由于在偏航通道機動較大,因此偏航的加速度指令Aym與俯仰的加速度指令Azm1或Azm2相比,曲線的波動較大。在圖6中,導彈的前置角θm和ψm也都逐漸收斂到零,同樣與θm相比,ψm在整個制導的過程中曲線的波動較大。圖7則表明導彈俯仰和偏航通道的視線角速率都最終收斂到零,以實現對目標的精確打擊。

4 結論
運用滑模變結構和動態逆控制理論,設計了攻擊時間約束下打擊固定目標的三維制導律,并與將俯仰通道的控制量修改為推導的增廣比例制導律作了比較,仿真的結果驗證了本文所設計的制導律的有效性和優越性。
[1] Jeon I S,Lee J I,Tahk M J.Impact-time-control guidance law for anti-ship missiles[J].IEEE Trans.on Control System Technology,2006,14(2):260-266.
[2] Kim T H,Lee C H,Jeon I S,Tahk M J.Augmented polyno-mial guidance with impact time and angle constraints[J].IEEE Transactions on Aerospace and Electronic System,2012,49(4):2806-2817.
[3] 張友根,張友安.控制撞擊時間與角度的三維導引律:一種兩階段控制方法[J].控制理論與應用,2010,27(10):1429-1434.
[4] Song S H,Ha I J.A lyapunov-like approach to performance analysis of three-dimensional pure PNG laws[J].IEEE Transactions on Aerospace and Electronic System,1994,30(1):239-247.
[5] 張友安,馬國欣.攻擊時間控制的動態逆三維制導律[J].哈爾濱工程大學學報,2010,31(2):215-219.
[6] Shashi Ranjan Kumar,Debasish Ghose.Three dimensional imp-act angle constrained guidance law using sliding mode control[C].2014 American Control Conference,Portland,Oregon,USA,June 4-6,2014:2474-2479.
[7] 周荻.尋的導彈新型導引規律[M].北京:國防工業出版社,2002:8-26.
Three-dimensional Guidance Law with Impact Time Constraint
WANG Jian,LIU Yuan-fan,SHI Zhen
(College of Automation,Harbin Engineering University,Harbin 150001,China)
Based on the missile-target relative motion equations in the three-dimensional space,a impact time constrained three-dimensional guidance law was deduced for multiple missiles in attacking a stationary target simultaneously at the desired impact time.A sliding mode variable structure guidance law was adopted in the pitch channel and the yaw channel was controlled by a maneuver control system using the dynamic inversion control,the maneuver control instruction was able to adjust the impact time to a designated value,and the pitch control command was revised as the instruction of the derived augmented proportional guidance law for comparison.Finally,numerical simulation results demonstrate that the proposed guidance law can make time-to-go error be ultimately reduced to zero and satisfies the requirements of the impact time as well as the guidance precision,the validity and superiority of the algorithm is confirmed.
Impact time constrained;Dynamic inversion control;Sliding mode variable structure;Augmented proportional;Guidance law
2015 - 06 - 10;
2015 - 07 - 10。
王健(1988 - ),男,碩士,主要研究方向是導彈的制導與控制。
E-mail:wangjian411@hrbeu.edu.cn
TJ765.3
A
2095-8110(2015)06-0012-07
