全閉環伺服機器人正運動學的研究
2015-03-09 03:32:34劉樂韓建海
機床與液壓 2015年21期
劉樂,韓建海
(河南科技大學機電工程學院,河南洛陽 471003)
全閉環伺服機器人正運動學的研究
劉樂,韓建海
(河南科技大學機電工程學院,河南洛陽 471003)
對于在各關節上采用編碼器的伺服控制的機器人,雖然結構簡單,但是由于各關節實際響應的結果與編碼器反饋存在誤差,所得的末端位姿的精確位置難以確定。為此,在很多場合下,都希望通過某種外部位姿直接給定手臂末端位姿的運動,實現機器人全閉環的伺服控制,但是由于牽扯到坐標系的變換,通常的基于關節伺服的齊次坐標變換矩陣無法直接使用,本文作者給出一種數學方法,利用該方法,可方便地推導各種坐標系間的變換矩陣,并且給出了全閉環伺服系統的正運動學及其研究方法。
坐標系變換;全閉環伺服機器人;正運動學;群論
0 前言
關節伺服控制的機器人是基于各個關節獨立進行控制的,雖然它們結構簡單,但是由于各關節實際的響應的結果未知,所得的末端位姿的響應就難以預測,而且為了得到適當的末端響應,對于各關節的伺服系統的增益進行調節也很困難,這時需要使用全閉環伺服來控制機器人。而一般的對于全閉環伺服機器人采用半閉環控制、全閉環位置反饋的混合閉環方式進行[1],但是這種控制方式可能會由于各關節運動控制的誤差和傳感器測量誤差的積累從而使得整體控制的運動平穩性相對變差,并且隨著關節數目的增長問題將會更加嚴重,因此對于多關節的閉環控制伺服機器人采用全閉環控制和全閉環反饋的完全閉環機器人系統在理論上將會獲得更好的效果,但是它的運動學推導和研究卻很少有人關注,混合閉環系統與完全閉環系統的系統框圖如圖1。
而對于各類直角坐標系的變換,前人曾做了大量的基礎性的研究工作,而且由于直角坐標系的變換在衛星定位上的巨大的實用價值,而在GPS導航和定位中得到了充分的研究和利用,其中基于Bursa-Wolf模型、Molodensky Badekas模型、KrakivskyThomson模型、Veis模型的坐標變換方法[2]得到大量的研究者的關注,已經有人將理論進行了簡化并且編制出使用的程序[3-5],這些模型大多數含有7個轉換參數即3個平移參數,3個旋轉參數和1個縮放因子[5],這與所要研究的機器人的平移和旋轉相對應,但是,上述研究主要偏向于導航,而與機器人的運動學關系不大,下面將通過一些基本的公式和原理來推導全閉環機器人的運動學。
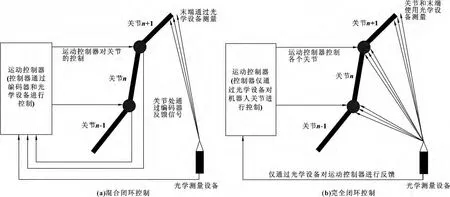
圖1 混合閉環系統與完全閉環系統的系統框圖

也就是說任意一個齊次坐標變換群可以分解為一個正規子群旋轉群和一個子群平移群的半直積,若記旋轉群為Rot,平移群為Tv,則T=Rot×Tv。因此任意一個齊次坐標矩陣都可以使用一個平移矩陣和一個旋轉矩陣來表示,也就是說任意一個空間的坐標變換都可以分級為一個平移變換與一個旋轉變換。
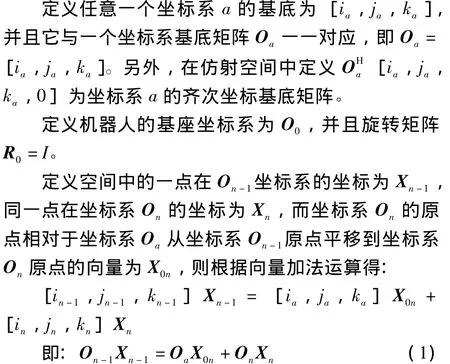
根據因果關系原理,坐標系On的姿態必然可以表示為由坐標系O0至On-1中的一個坐標系經過旋轉矩陣Rn旋轉而得。定義坐標系On的姿態是由坐標系On-1相對于坐標系Oi旋轉而得,而坐標系 On-1可以由下式確定:

式中的R'k是坐標系On-1式中旋轉矩陣經過重排
1 數學模型、基本假設和基本定義
對齊次坐標變換矩陣進行分解得序后位于位置k的旋轉矩陣。
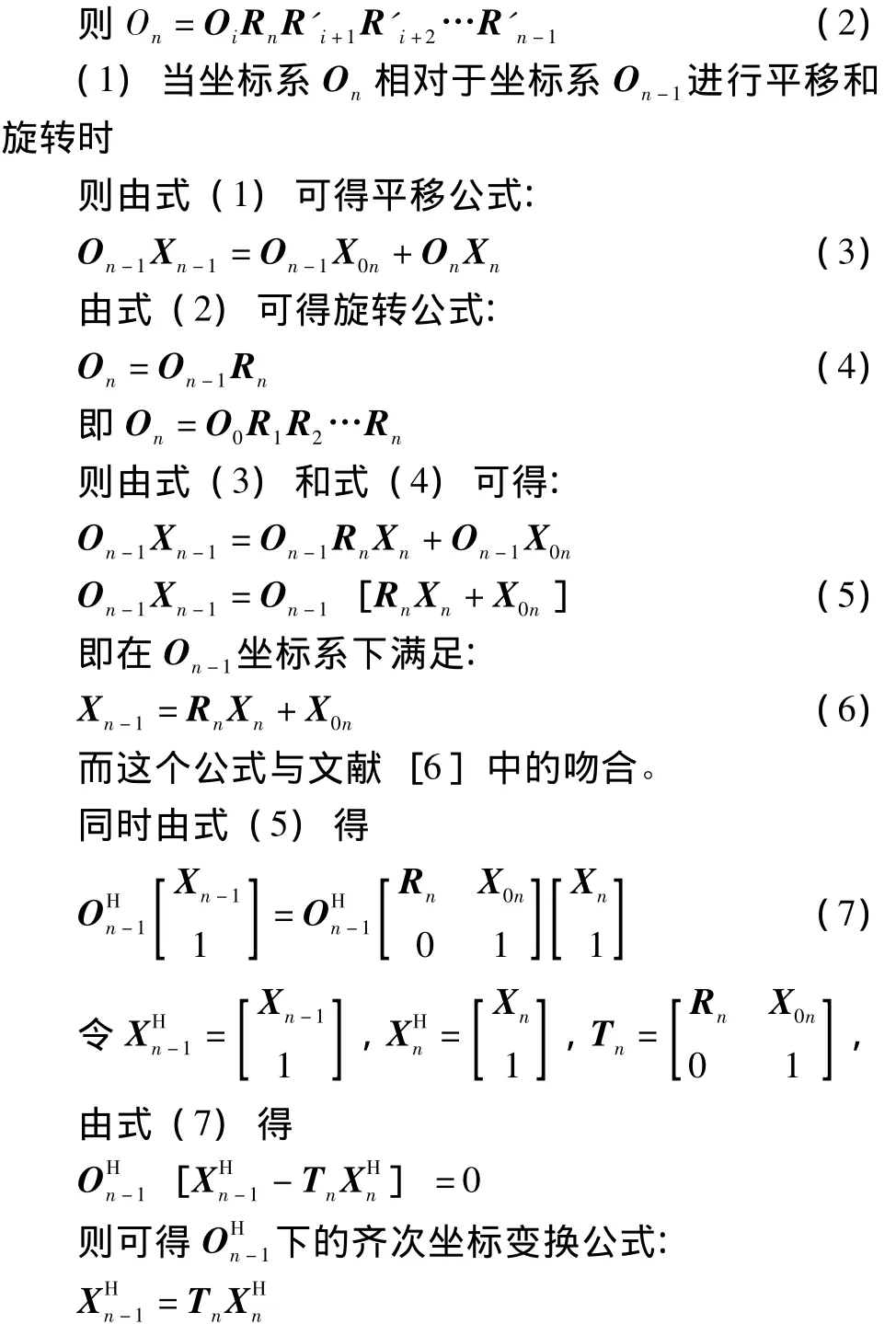
而這個公式與文獻 [6]中的吻合。
(2)當坐標系On相對于機架坐標系O0進行平移和旋轉時
則由式 (1)可得此時的平移公式:

由式 (2)可得此時的旋轉公式:

2 完全閉環伺服控制機器人的運動學

所以相對于動坐標系進行坐標變換時。齊次坐標矩陣右乘,相對于靜坐標系進行坐標變換時齊次坐標矩陣左乘的傳統的結論是不正確的。從位移方程式的平移項即可了解。

結論也是不正確的,這是由于一般的旋轉矩陣屬于SO(3)群,而SO(3)群為非阿貝爾群,所以兩個變換式 (12)與式 (13)一般不同,但是當他們繞著同一個軸旋轉時,旋轉陣退化為SO(2)群,而SO(2)群為阿貝爾群,此時式 (12)與式 (13)相同。
3 實驗驗證
實驗基于Matlab2010b和Mupad實現,實驗的坐標變換陣有兩個T1為繞z軸旋轉π/2,平移向量為[2 1 3],T2為繞y軸旋轉π/2,平移向量為 [2 0 4],變換前后的世界坐標系保持不變,并且已經在坐標軸上給予顯示,而空間中的動坐標系則在圖中使用紅色箭頭 (x軸),綠色箭頭 (y軸),藍色箭頭(z軸)表示,結果如下。
初始的坐標定義如圖2所示。
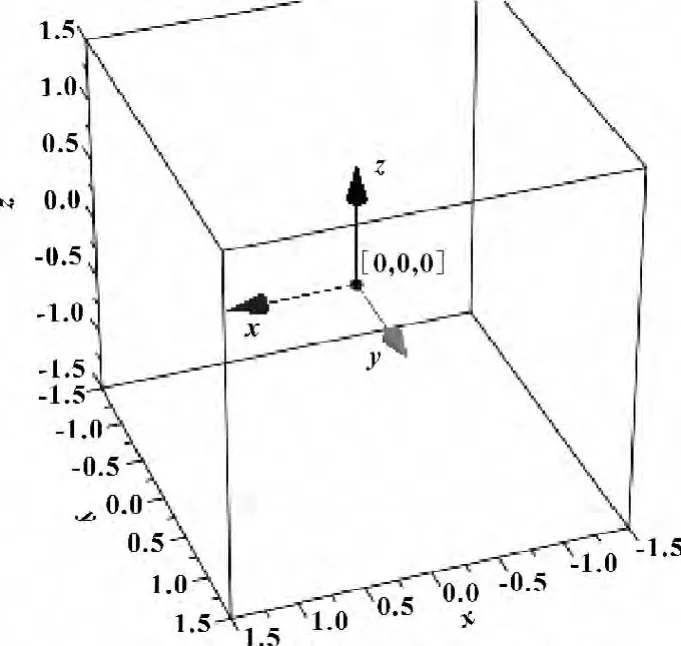
圖2 初始坐標系定義
(1)當坐標系On相對于坐標系On-1進行平移和旋轉時
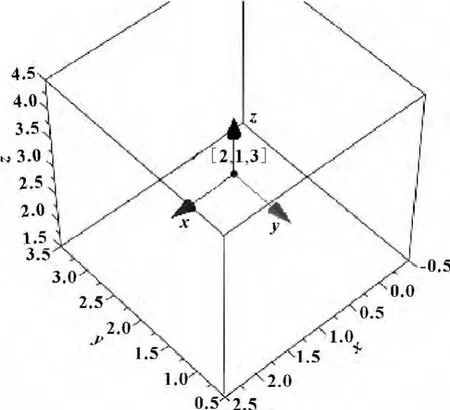
圖3 對初始坐標系使用T1變換時的結果m1
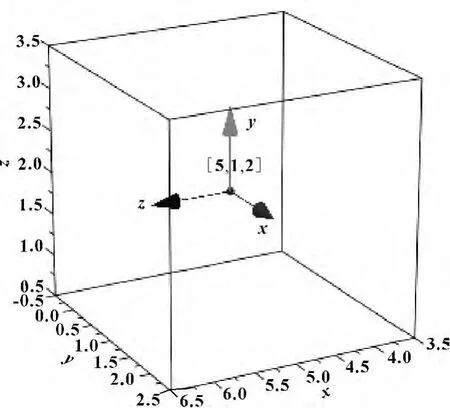
圖4 對m1坐標系使用T2變換時的結果
從圖中可知,在相對于坐標系On-1進行坐標系變換時 (也就是傳統的工業機器人所使用的坐標系),與其他資料上的公式吻合良好,可以充分說明上述公式的正確性。
(2)當坐標系On相對于機架坐標系O0進行平移和旋轉時
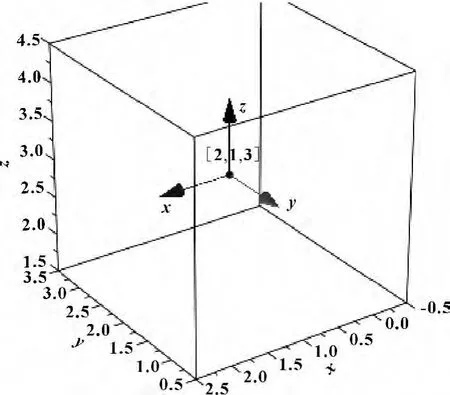
圖5 對初始坐標系使用T1變換時的結果m1
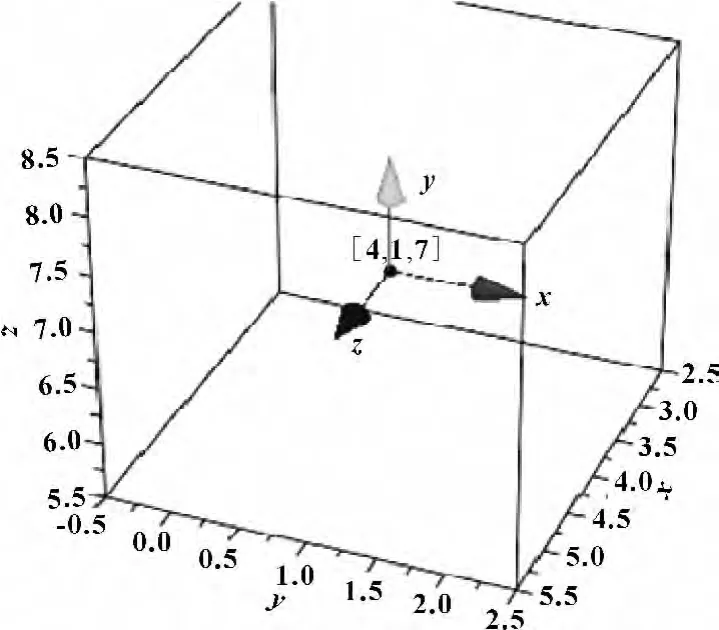
圖6 對m1坐標系使用T2變換時的結果
從圖中可知,在相對于坐標系O0進行坐標系變換時 (也就是完全閉環機器人的坐標系),結果與常識吻合良好。
4 結論
給出一種數學方法推導各種坐標系的變換矩陣,并且推導了不同坐標系的齊次坐標變換矩陣。最后由齊次坐標變換矩陣得出了基于固定坐標系和運動坐標系的位移方程式,從理論上得到了全閉環伺服機器人的正確的正運動學方程式。
[1]田文罡,陳學東,蘇軍,等.六足步行機器人的多關節協調控制[J].機器人技術與應用,2009(6):33-37.
[2]KUTOGLUHakan S,MEKIK Cetin,AKCIN Hakan.A Comparison of Two Well Known Models for 7-Parameter Transformation[J].The Australian Surveyor,June 2002,47(1):24-30.
[3]李樹奎,杜國明,李秀海.進行GPS坐標成果轉換及精度分析的兩種方法[J].煤炭技術,2004,23(7):89 -90.
[4]張萌,楊志勇,丁克良.基于改進的布爾莎-沃爾夫模型的任意旋轉角坐標轉換方法的研究[J].北京測繪,2013,108(1):20 -23.
[5]陳宇,白征東,羅騰.基于改進的布爾沙模型的坐標轉換方法[J].大地測量與地球動力學,2010,30(3):71 -73.
[6]韓建海.工業機器人[M].武漢:華中科技大學出版社,2009:52.
Research about Direct K inematics of Full Close-loop Servo Control Robot
LIU Le,HAN Jianhai
(School ofMechatronics Engineering,Henan University of Science and Technology,Luoyang Henan 471003,China)
The servo control of robot based on the encoder on the joint has a sample structure,but the actual response of every joint has a small difference with the encode value,so the precise position of the end of the robot is difficult to determine.For this reason,in many situations,the precisemotion of the end of the robotarm was expected to get directly in certainmethods from external position,so as to realize the full close-loop servo control of the robot,however,due to the coordinate transform concerned,the traditional method was not able to be applied to it directly based on homogeneous coordinate transform matrix of the servo joints.A mathematical method is given for using,which can easily deduce all kinds of coordinate transform matrix,and give the directkinematics of full closeloop servo control system and its researchmethod.
Coordinate transform;Close-loop servo control robot;Direct kinematics;Group theory
TP242.2
A
1001-3881(2015)21-074-4
10.3969/j.issn.1001 -3881.2015.21.017
2014-09-14
劉樂 (1989—),男,碩士,研究方向為機器人。E-mail:qaqa1456@sina.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19
