插齒機主運動液壓系統的仿真分析
2015-02-22 09:43:42蔣書運楊成偉姚華
機械制造與自動化 2015年2期
蔣書運,楊成偉,姚華
(東南大學 機械工程學院 江蘇 南京 211189)
?

插齒機主運動液壓系統的仿真分析
蔣書運,楊成偉,姚華
(東南大學 機械工程學院 江蘇 南京 211189)
摘要:以YS51200CNC插齒機主運動液壓系統為研究對象,根據經典控制理論建立其控制閥數學模型,基于AMESim及Simulink軟件建立液壓系統聯合仿真模型,并進行聯合仿真分析。根據仿真結果,分析控制閥與液壓缸間管道長度對液壓系統響應特性的影響。利用PID調節器對伺服比例閥閥芯位置信號進行調節,有效地降低了系統的穩態誤差,提高了系統的響應速度。
關鍵詞:液壓系統;伺服比例閥;AMESim-Simulink聯合仿真
0引言
液壓傳動具有結構緊湊、慣性小及無極調速等優點,但同樣存在著泄露、對油溫變化敏感及對元件精度要求高等缺點。為保證液壓系統的正常運行,需要對液壓系統進行分析和研究。隨著仿真理論及計算機技術的發展,計算機液壓仿真技術得到了更多的研究和應用。液壓仿真研究有針對液壓元件的仿真研究以及面向液壓系統的仿真研究:關于液壓元件優化的研究,楊逢瑜等人通過對液壓電梯液壓缸摩擦力對啟動平穩性的研究,對液壓缸的結構加以改進,提高了電梯啟動的平穩性[1]。金勝秋基于同步閥的理論基礎,利用AMESim對同步閥進行建模仿真,根據仿真結果對同步閥的結構尺寸進行改進,得到尺寸小巧穩定性好的同步閥[2];關于液壓系統的仿真研究,劉春慶對水壓機電液比例控制系統關鍵元件進行數學建模,利用傳統PID控制理論對系統進行分析校正,并設計出模型參考自適應控制器對系統進行控制,提高了系統的動態特性[3]。
圖1為YS51200CNC插齒機結構圖,其主運動通過一套液壓系統實現,液壓系統的結構如圖2所示。在工作過程中該液壓系統存在著響應慢,速度穩定性差,換向不穩定等問題。本文將基于AMESim和Simulink軟件建立液壓系統的聯合仿真模型,并進行仿真分析,研究控制閥及液壓缸間連接管道長度對系統動態特性的影響,并利用PID調節器對控制信號進行調節,降低液壓缸穩態誤差,提高系統的動態特性。

圖1 插齒機結構示意圖

圖2 插齒機液壓系統示意圖
1伺服比例閥數學模型的建立
要建立液壓系統的數學模型,首先要建立重要液壓元件的數學模型。基于經典控制理論,建立YS51200CNC數控插齒機主運動液壓系統中伺服比例閥的數學模型。
該液壓系統采用力士樂0811404299型號伺服比例閥,該伺服比例閥為力士樂高響應系列閥,額定流量為150L/min。力士樂樣本資料提供了主閥芯位移響應的Bode圖,該Bode圖通過輸入激勵電壓信號,測量主閥芯位移響應信號處理得到。通過擬合該Bode圖可以建立主閥芯輸出位移的傳遞函數。
伺服比例閥的傳遞函數是一個典型的二階環節[5],其傳遞函數為:

(1)
式中:ωn—伺服比例閥的固有頻率;ξ—伺服比例閥的阻尼比。
根據薄壁小孔流量方程可知,在一定的工作壓力下,閥芯位移與流量呈比例關系:

(2)
聯立式(1)和式(2)可得主閥芯輸出位移與伺服比例閥輸入電壓信號間的傳遞函數為:

(3)

當f=42Hz時,ω=f·2π=263.76rad/s,Bode圖對數幅頻特性幅值為-3dB,對應相角為-90°。利用MATLAB畫出不同參數的曲線,對Bode圖進行擬合,得到當阻尼比ξ=0.6時,曲線擬合最準確,對應的伺服比例閥主閥芯位移傳遞函數:
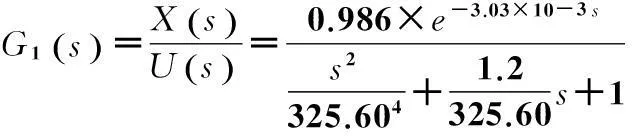
(4)
伺服比例閥傳遞函數G(s)=G1(s)·Kx
(5)
2建立系統的仿真模型
利用建立的元件數學模型,基于AMESim和Simulink建立液壓系統的聯合仿真模型。AMESim提供了豐富的液壓元件庫,但是現實使用的液壓元件種類遠遠超過元件庫所能提供的,但AMESim提供了強大的HCD庫,可以根據液壓元件幾何形狀及物理特性詳細構建特定的液壓元件。AMESim軟件在控制信號處理方面不及Simulink,Simulink在動態仿真時可以方便的調節控制參數進行仿真,充分利用兩種軟件的優點建立AMESim-Simulink聯合仿真模型,對液壓系統進行聯合仿真。
2.1 伺服比例閥的仿真模型
在AMESim草圖模式下利用HCD庫建立伺服比例閥主閥的模型,圖3中port A為伺服比例閥油口A,它連接伺服比例閥油口A的兩個控制邊。port B為伺服比例閥油口B,連接伺服比例閥油口B的兩個控制邊。圖3中AMESim與Simulink的接口模塊接收輸入信號并在Simulink中處理,再將處理后的主閥芯位移信號傳遞給AMESim主閥芯模型。

圖3 伺服比例閥仿真模型
在AMESim參數模式下設置模型參數:
油液密度865kg/m3;油液運動粘度46mm2/s;油液動力粘度0.03979Pa.s;油液體積彈性模量700MPa;主閥節流口流速系數0.62;閥口全開位移1.2mm;單閥口壓降為5kPa時全開閥口流量150L/min。
2.2 液壓系統的仿真模型
在完成的伺服比例閥模型基礎上,繼續建立整個液壓系統的仿真模型。在AMESim草圖模式中建立各液壓元件模型,連接各元件組成完整的液壓系統模型,如圖4所示。
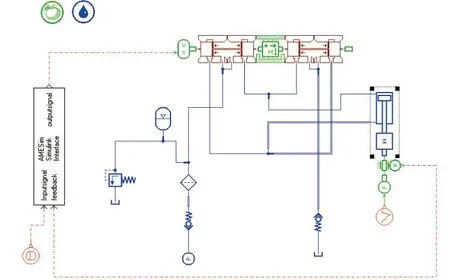
圖4 液壓系統仿真模型
液壓系統模型參數設置:
恒壓源壓力13MPa;控制閥-液壓缸連接管道長度2.5m,管道直徑35mm;液壓缸活塞直徑63mm;活塞桿直徑45mm;液壓缸長度520mm;負載質量30kg;液壓缸粘性摩擦系數170N·s/m;位移傳感器放大倍數1000/m;回油路單向閥背壓300kPa;
3液壓系統的仿真分析
在AMESim環境下設置液壓缸位移輸入值,輸入附加切削力的模擬值,在0-0.3 s間,切削力值為0 N,在0.3 s時,切削力瞬間增大到10000 N,利用AMESim和Simulink聯合仿真分析在切削力干擾下系統的響應。
3.1 控制閥-液壓缸間連接管道長度的影響
一般情況下,液壓缸—負載系統的動態響應是整個系統中最低的,其固有頻率的高低影響到整個電液比例控制系統的動態特性,其固有頻率越高,系統的動態特性越好,而伺服閥與液壓缸間連接管道的長度對缸—負載系統的固有頻率影響很大。
YS51200CNC插齒機液壓工作站與液壓缸容腔之間有一定的高度差,伺服比例閥通過兩個油管A,B與液壓缸上下兩個容腔相連,油管長度越長,管內的死區容積越大,液壓缸-負載系統的動態特性則越差。
通過AMESim模型,分別分析長度為2.5 m和0.5 m兩種不同油管長度對液壓缸單出桿的響應速度的影響如圖5和圖6所示。

圖5 管長2.5 m液壓缸單出桿速度響應曲線
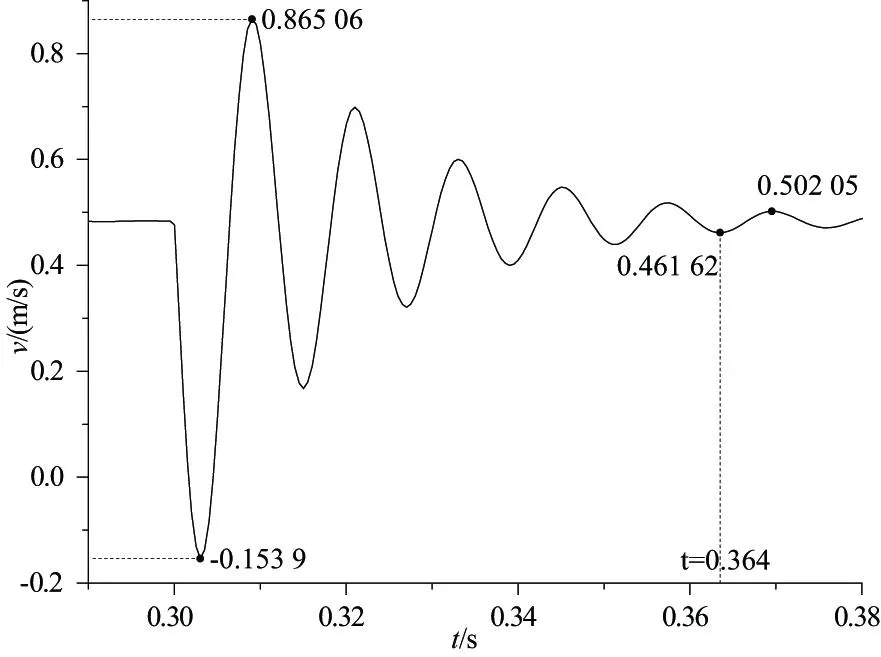
圖6 管長0.5 m液壓缸單出桿速度響應曲線
由圖5可知,管長為2.5m時,在0.3s突加負載干擾下,液壓缸單出桿的速度由穩態速度值0.483m/s突然降低,在0.306s時降低到最低值-0.597m/s,經過0.212s時間的調整,速度達到穩態誤差允許范圍內。而如圖6所示,當管長為0.5m時,速度響應時間降低,在0.303s時,速度降低到-0.134m/s,經過0.064s的調整液壓桿的速度值達到誤差允許范圍內。
因此,控制閥與液壓缸之間連接管道的長度越短,即
管道內形成的封閉空間體積越小,在負載發生變化時,液壓桿速度的振動幅值越小,振動的峰值時間越短,調整時間越短,液壓缸越快進入穩態,整個液壓系統的動態特性越好。
3.2 PID調節器對系統響應特性的影響
基于Simulink建立液壓系統信號控制部分模型[6],在控制回路加入PID調節器,如圖7所示。
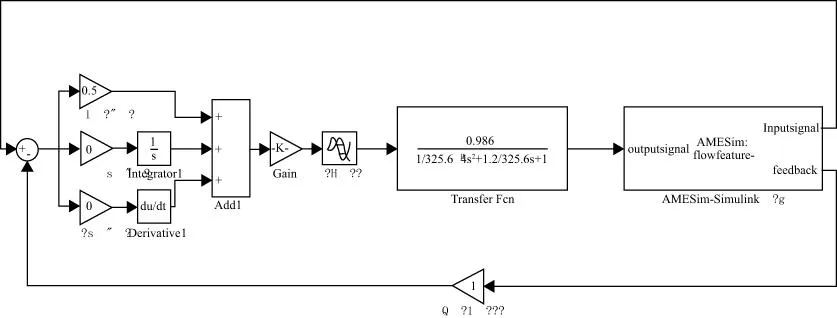
圖7 Simulink模型圖
在控制回路中引入PID控制器,其比例系數KP=2.5,積分系數KI=1.5。
如圖8所示,經PID調節后,位移的誤差穩態降低,未經PID調節誤差為0.01096m,而PID調節后位移誤差為0.00247m,穩態誤差值降低0.00849m。

圖8 PID調節和未調節液壓缸單出桿位移響應曲線
由圖9和圖10比較可以發現,經過PID調節后,液壓缸速度加速調整時間為0.0535s,比未經PID調節的調整時間降低42.5%。液壓缸突然收到切削力干擾后,系統發生振蕩,經PID調節的系統經過0.0615s的調整進入誤差允許范圍(Δ=±5%)內,而未經PID調節的系統調整時間為0.0745s,調整時間降低17.4%。在刀具上的切削力突然消失時,系統發生振蕩,經過PID調節的系統經過0.066s的調整進入誤差允許范圍內,而未經調節的系統需要調整0.0945s才能進入誤差允許范圍,調整時間降低30.2%。

圖9 未經PID調節速度響應曲線

圖10 PID調節后速度響應曲線
在經過PID控制器調節后,液壓系統的穩態誤差得到有效的控制,動態響應速度也得到了提升。
5結論
利用AMESim及Simulink建立YS51200CNC插齒機主運動的液壓系統仿真模型,進行聯合仿真分析,仿真結果表明:
1) 控制閥與液壓缸間連接管道的長度對液壓系統的響應特性具有重要影響,管道越短,響應越快,液壓缸調整時間越短,系統動態特性越好。
2) 信號控制回路中使用普通PID控制器并整定設置合理的PID參數,可以降低液壓缸的位移穩態誤差,提高液壓缸的響應速度。
參考文獻:
[1] 楊逢瑜,肖飛,張小安. 液壓缸粘性摩擦對液壓電梯啟動平穩性影響的研究[J]. 機床與液壓,2006,3:129-130.
[2] 金勝秋. 基于AMESim的液壓同步閥的仿真分析及結構研究[D]. 吉林:吉林大學,2009.
[3] 劉春慶. 60MN水壓機電液比例控制系統仿真與實驗研究[D]. 秦皇島:燕山大學,2012.
[4] 劉長年. 液壓伺服系統優化設計理論[M]. 北京:冶金工業出版社,1989.
[5] 許益民. 電液比例控制系統設計與分析[M]. 北京:機械工業出版社, 2005.
[6] 孫衍石,靳寶全,熊曉燕. 電液伺服比例閥控缸位置控制系統AMESim/Matlab聯合仿真研究[J]. 液壓氣動與密封,2009,4:38-42.

Simulation and Analysis of Hydraulic System in Gear Slotting Machine’s Main Motion System
JIANG Shu-yun, YANG Cheng-wei,YAO Hua
(School of Mechanical Engineering, Southeast University, Nanjing 211189, China)
Abstract:The hydraulic system in YS51200CNC gear slotting machine’s main motion system is studied in this paper. The mathematical model of the control valve is built according to the conventional control theory. A combined simulation model is developed and analyzed based on the software AMESim and Simulink. The influence of the length of the pipe connecting control valve and hydraulic cylinder on the characteristics of hydraulic system is analyzed. The PID controller is utilized to control the signal of the displacement of the control valve’s spool, the result shows that PID controller reduces the steady state error and enhances the reaction speed of the hydraulic system.
Keywords:hydraulic system; servo-proportional valve; AMESim-Simulink combined simulation
收稿日期:2015-01-02
中圖分類號:TH137.33;TP391.9
文獻標志碼:B
文章編號:1671-5276(2015)02-0001-03
作者簡介:蔣書運(1966-),男,安徽六安人,教授,博士生導師,博士,主要研究領域:高速加工機床、飛輪儲能系統、機械動力學、摩擦學等。《振動、測試與診斷》雜志常務編委。發表期刊論文100篇,其中:國際期刊論文40篇,SCI收錄40篇,EI收錄50篇,授權國家專利40余項;先后主持國家自然科學基金項目5項、國家863計劃項目1項、國家科技重大專項課題5項、教育部高等學校博士點基金1項、江蘇省科技計劃項目10余項以及軍工和企業委托項目10余項;以第一完成人分別獲教育部科技進步二等獎1項、教育部技術發明獎二等獎1項;2006年入選“教育部新世紀優秀人才支持計劃”。
基金項目:國家高檔數控機床與基礎制造裝備重大專項(2010zx04001-192)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
