基于滑模變結(jié)構(gòu)的無線傳感器網(wǎng)絡(luò)擁塞控制
2015-02-20 08:15:14王夫棟
計算機工程 2015年3期
關(guān)鍵詞:模型
陳 樹,王夫棟
(江南大學(xué)物聯(lián)網(wǎng)工程學(xué)院,江蘇無錫214122)
基于滑模變結(jié)構(gòu)的無線傳感器網(wǎng)絡(luò)擁塞控制
陳 樹,王夫棟
(江南大學(xué)物聯(lián)網(wǎng)工程學(xué)院,江蘇無錫214122)
為解決無線傳感器網(wǎng)絡(luò)逐跳節(jié)點擁塞控制問題,在節(jié)點網(wǎng)絡(luò)層與鏈路層之間引入水槽流入與流出的數(shù)學(xué)模型,提出一種針對逐跳節(jié)點級鏈路層幀緩沖區(qū)隊列長度的擁塞控制模型,并采用基于趨近律的離散滑模控制結(jié)構(gòu)作為該模型的控制器,控制過程簡便且易于實現(xiàn)。仿真結(jié)果表明,與常規(guī)的PID控制、模糊PID控制相比,該模型在響應(yīng)速度、延遲時間等方面性能較好。
無線傳感器網(wǎng)絡(luò);擁塞控制;離散滑模控制;趨近律;滑模變結(jié)構(gòu)
1 概述
無線傳感器網(wǎng)絡(luò)(Wireless Sensor Network, WSN)是一種無基礎(chǔ)設(shè)施的網(wǎng)絡(luò),由傳感器節(jié)點以自組織形式構(gòu)成,實現(xiàn)信號感知、數(shù)據(jù)采集和傳輸。由于無線傳感器網(wǎng)絡(luò)節(jié)點分布密集、信道鏈路的競爭和資源受限等特性,使得無線傳感器網(wǎng)絡(luò)容易出現(xiàn)擁塞,嚴(yán)重影響網(wǎng)絡(luò)的服務(wù)質(zhì)量和生命周期,因此擁塞控制成為無線傳感器網(wǎng)絡(luò)的關(guān)鍵技術(shù)之一。無線傳感器網(wǎng)絡(luò)擁塞可以分為多個層次,其中之一就是節(jié)點級的擁塞,即節(jié)點需要發(fā)送的分組流量超過節(jié)點的發(fā)送能力,導(dǎo)致緩存溢出造成數(shù)據(jù)分組的丟失和網(wǎng)絡(luò)排隊延遲的增加[1-2]。
近年來,研究人員針對傳感器網(wǎng)絡(luò)應(yīng)用及通信方式的特殊性提出了一些相關(guān)的解決節(jié)點擁塞的辦法。文獻[3-4]提出了基于緩沖區(qū)或信道使用情況的擁塞控制方法;文獻[5]利用基于隊列和信道估計預(yù)測的擁塞算法,并通過自適應(yīng)流量控制算法調(diào)整速率;文獻[6]提出通過構(gòu)造一棵最短路徑且是最小擁塞權(quán)值樹來解決擁塞現(xiàn)象,上述文獻大都基于WSN擁塞閉環(huán)控制。
本文受文獻[7]中提出的自動控制系統(tǒng)在水槽液位中的應(yīng)用,以及文獻[8]中擁塞控制算法應(yīng)用的啟發(fā),提出一種針對逐跳節(jié)點級鏈路層緩沖區(qū)隊列長度的擁塞控制模型。該模型控制器采用基于趨近律的離散滑模控制結(jié)構(gòu),把單容水槽和雙容水槽流入與流出平衡關(guān)系應(yīng)用到無線傳感器網(wǎng)絡(luò)擁塞控制當(dāng)中。水槽水位控制與無線傳感器網(wǎng)絡(luò)擁塞控制雖
然控制領(lǐng)域和處理對象不同,但水槽液位控制與WSN的擁塞控制中的幀緩沖區(qū)長度控制有高度相似性,兩者都是保持流入與流出的平衡,把水槽的高度比作節(jié)點級鏈路層緩沖區(qū)隊列長度,從而得到新的擁塞控制模型。
2 離散時間系統(tǒng)滑模控制
考慮到無線傳感器網(wǎng)絡(luò)系統(tǒng)的復(fù)雜性、時變性及不確定性,將滑模控制引入到無線傳感器網(wǎng)絡(luò)的擁塞控制中。由于滑動模態(tài)可以進行設(shè)計且與對象參數(shù)及擾動無關(guān),變結(jié)構(gòu)控制具有快速響應(yīng)、對參數(shù)變化及擾動不靈敏、物理實現(xiàn)簡單等優(yōu)點,適合于無線傳感器網(wǎng)絡(luò)系統(tǒng)的應(yīng)用研究。本文采用滑模變結(jié)構(gòu)的方法來解決WSN擁塞問題。
根據(jù)文獻[9],離散滑模面設(shè)計為:

其中,C=[c1c2…cn1]T,在滑模控制中,參數(shù)c1,c2,…,cn應(yīng)滿足多項式pn-1+cn-1pn-2+...+c2p+c1為霍爾維茲,其中,p為Laplace算子。當(dāng)系統(tǒng)為一階時,c=0;本文是二階系統(tǒng)設(shè)計,所以n=2,多項式pn-1+cn-1pn-2+…+c2p+c1變?yōu)閜+c1,如果此式子是霍爾維茲,則多項式p+c1的特征值實部分為負(fù),即c1>0。理想誤差e(k)=xd-x(k),xd為理想輸出,由此可得:

根據(jù)文獻[11]可知,基于指數(shù)趨近律的式子為:

將式(2)代入趨近律式(3)得:

假設(shè)滑模變結(jié)構(gòu)可控條件CB≠0成立,離散滑模控制律為:

為避免控制器抖振,采用飽和函數(shù)sat(s)替換理想滑動模態(tài)中的符號函數(shù)sgn(s):
則控制律式變?yōu)?

由于基于指數(shù)的離散趨近律式滿足[10]:
同時,當(dāng)采樣時間T很小時,2-qT>>0,有:
所以,離散趨近律式滿足到達條件,可保證趨近律模態(tài)具有良好的品質(zhì),并且切換帶的大小可以計算,求解滑模動態(tài)控制直接而簡單。
3 擁塞控制模型設(shè)計
3.1 單個節(jié)點擁塞控制模型
參照文獻[7]中的單容水槽控制模型,如圖1所示,設(shè)計單節(jié)點緩沖區(qū)控制模型,如圖2所示。
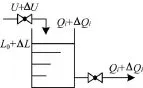
圖1 單容水槽
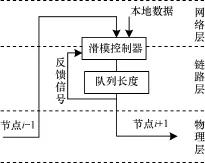
圖2 單節(jié)點模型
令U表示輸入數(shù)據(jù)包速率的穩(wěn)態(tài)值,ΔU表示輸入數(shù)據(jù)包速率的增量,Q0表示輸出數(shù)據(jù)包速率的穩(wěn)態(tài)值,ΔQ表示輸出數(shù)據(jù)包速率的增量,L表示節(jié)點緩存區(qū)的隊列長度,L0表示節(jié)點緩存區(qū)隊列長度的穩(wěn)態(tài)值,ΔL表示節(jié)點緩存區(qū)的隊列長度的增量。
流出的數(shù)據(jù)包與流入數(shù)據(jù)包之差為:


將上式帶入式(7)得:

其中,T=RA。在零初始條件下,對式(9)進行拉氏變換,得到單個節(jié)點的傳遞函數(shù)為:

3.2 多節(jié)點擁塞控制模型
參照文獻[7]雙容水槽控制模型,如圖3所示,設(shè)計2個節(jié)點傳輸模型,如圖4所示。
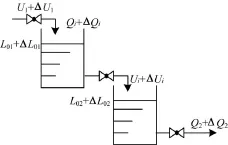
圖3 多容水槽
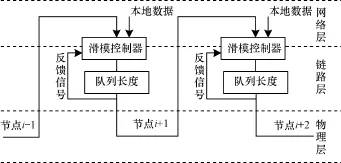
圖4 多節(jié)點模型
令u1表示第1個節(jié)點輸入數(shù)據(jù)包速率的穩(wěn)態(tài)值,Δu1表示輸入數(shù)據(jù)包速率的增量,Q1表示輸出數(shù)據(jù)包速率的穩(wěn)態(tài)值,ΔQ1表示輸出數(shù)據(jù)包速率的增量,L1表示節(jié)點緩存區(qū)的隊列長度,L01表示節(jié)點緩存區(qū)隊列長度的穩(wěn)態(tài)值,ΔL01表示節(jié)點緩存區(qū)的隊列長度的增量。令Q2表示第2個節(jié)點輸出數(shù)據(jù)包速率的穩(wěn)態(tài)值,ΔQ2表示輸出數(shù)據(jù)包速率的增量,L2表示節(jié)點緩存區(qū)的隊列長度,L02表示節(jié)點緩存區(qū)隊列長度的穩(wěn)態(tài)值,ΔL02表示節(jié)點緩存區(qū)的隊列長度的增量。
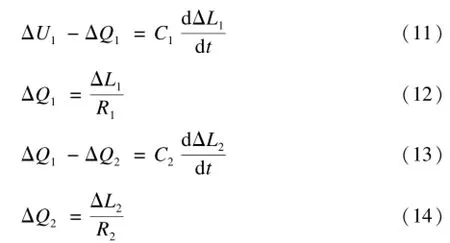
其中,C1和C2為2個節(jié)點的緩沖區(qū)隊列的容量系數(shù);R1和R2為節(jié)點輸出變化與緩沖區(qū)隊列變化的比例系數(shù),將式(12)和式(14)代入式(13),得到:

因此,有:
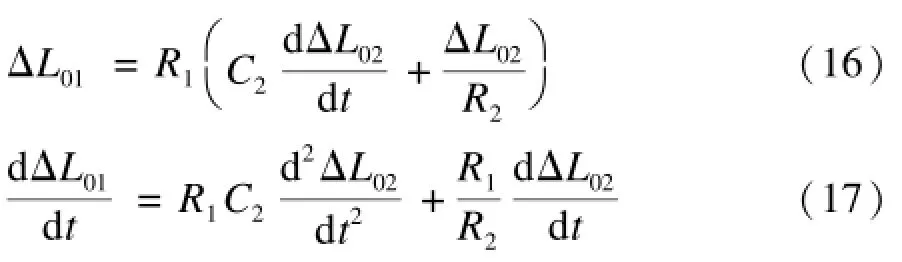
把式(12)代入式(11):

將式(16)和式(17)代入式(18),得到:
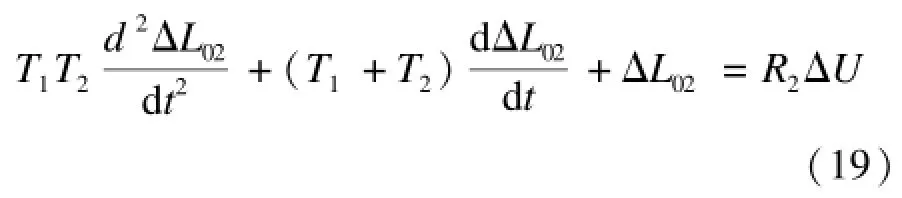
其中,T1=R1C1為第1個節(jié)點的時間常數(shù),T2=R2C2為第2個水槽的時間常數(shù)。在零初始條件下,對上式進行拉氏變換,得到串聯(lián)節(jié)點的傳遞函數(shù):
4 對比仿真
無線傳感器網(wǎng)絡(luò)擁塞控制算法的性能是網(wǎng)絡(luò)QoS的重要指標(biāo),采用常規(guī)PID進行擁塞控制容易出現(xiàn)隊列長度抖動、時間延遲長和響應(yīng)速度慢等問題,采用改進的模糊自適應(yīng)PID算法難以應(yīng)對無線傳感器網(wǎng)絡(luò)應(yīng)用環(huán)境嚴(yán)重不確定性;為此,本文采用滑模變結(jié)構(gòu)控制網(wǎng)絡(luò)擁塞。該算法具有快速響應(yīng)、對參數(shù)變化及擾動不靈敏、無需系統(tǒng)在線辨識,物理實現(xiàn)簡單等優(yōu)點,且基于趨近律的滑模控制更能減少節(jié)點隊列抖動問題[11]。
在算法的仿真過程中,為防止由于輸出超過隊列長度導(dǎo)致數(shù)據(jù)包溢出發(fā)生,通過不斷的調(diào)試,確定PID控制參數(shù)和模糊自適應(yīng)參數(shù)控制參數(shù),使其不出現(xiàn)超出隊列長度的抖動。針對方程式(10),單節(jié)點一階傳遞模型,令R=3,采樣時間為1 ms,取滑模參數(shù)T=3,C=1,q=200。采用控制律式:

取ε=0.05,按照上面網(wǎng)絡(luò)參數(shù)選取,對3種算法在瞬時隊列長度進行比較,如圖5和圖6所示。
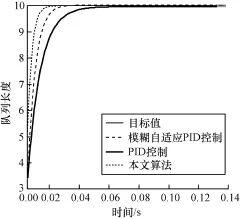
圖5 單節(jié)點隊列長度仿真結(jié)果
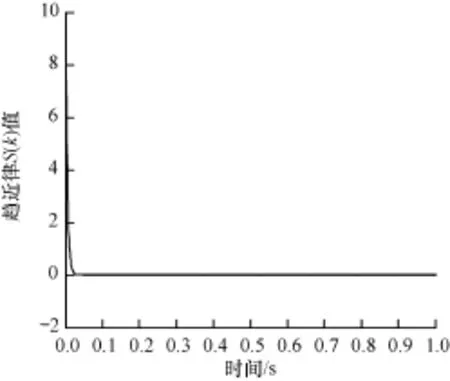
圖6 本文算法趨近律仿真結(jié)果1
由于網(wǎng)絡(luò)的不穩(wěn)定性,最大隊列長度可能變化,本文假設(shè)在采樣次數(shù)K=200時目標(biāo)值出現(xiàn)變化,仿真結(jié)果如圖7所示。

圖7 目標(biāo)隊列長度發(fā)生變化時的仿真結(jié)果1
針對方程式(20),多節(jié)點傳遞模型,令R2=3,T1=1,T2=1,采樣時間為1 ms,取q=50,ep=0.5,C=[32 1];采用控制律式:

取ε=0.05。在保持模糊自適應(yīng)控制和PID控制不出現(xiàn)抖動的情況下,按照上面網(wǎng)絡(luò)參數(shù)選取,對3種算法在瞬時隊列長度進行比較,如圖8和圖9所示。
同樣,針對二階,假設(shè)在采樣次數(shù)K=1 000時,目標(biāo)值發(fā)生變化,仿真如圖10所示。
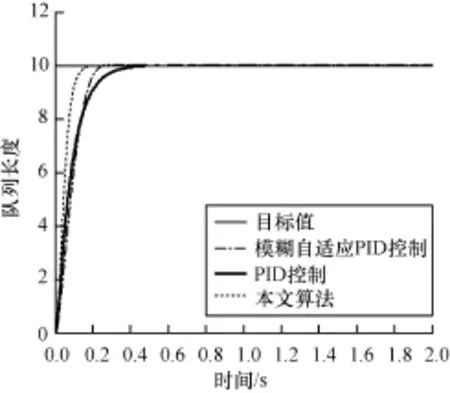
圖8 多節(jié)點隊列長度仿真結(jié)果
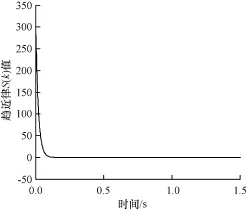
圖9 本文算法趨近律仿真結(jié)果2
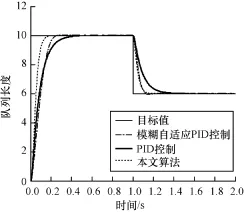
圖10 目標(biāo)隊列長度發(fā)生變化時的仿真結(jié)果2
由圖5和圖8可以看出,本文算法很快保持目標(biāo)隊列長度,響應(yīng)時間較短,使路由器中的數(shù)據(jù)接收和發(fā)送能夠達到一個平衡,降低緩存中隊列長度從而降低數(shù)據(jù)傳送的延時,由圖6和圖9可知,本文算法可以保證良好的趨近律品質(zhì),滑模運動響應(yīng)速度快,避免了網(wǎng)絡(luò)的延遲和擁塞的發(fā)生。圖7和圖10表明,本文選取的趨近律算法,在出現(xiàn)目標(biāo)值發(fā)生變化時,依然可以保持響應(yīng)速度快、延遲短,能較好地跟蹤目標(biāo)值。
5 結(jié)束語
本文把單容水槽和雙容水槽流入與流出平衡關(guān)系應(yīng)用到無線傳感器網(wǎng)絡(luò)擁塞控制當(dāng)中,用基于趨近律的離散滑模變結(jié)構(gòu)控制幀緩沖區(qū)隊列長度。仿真效果表明,本文算法能夠有效地降低隊列排隊延時,使無線傳感器網(wǎng)絡(luò)中的節(jié)點隊列長度快速、穩(wěn)定地收斂于期望值,而且無抖動。本文在無線傳感器網(wǎng)絡(luò)擁塞開環(huán)控制方面,提出一種新的方法,但還需要在實際的無線傳感網(wǎng)絡(luò)中,調(diào)整模型參數(shù),驗證其控制性能。
[1]李明維,井元偉,陳向勇.一種無線傳感器網(wǎng)絡(luò)跨層擁塞控制算法[J].東北大學(xué)學(xué)報,2012,33(1):10-20.
[2]Iyer Y G,Gandham S,Venkatesan S.STCP:A Generic TransportLayerProtocolforWirelessSensor Networks[C]//ProceedingsofIEEEICCCN’05.SanDiego,USA:IEEE Press,2005:7-19.
[3]Wan C,Eiseman S,Cambell A.CODA:Congestion Detection and Avoidance in Sensor Networks[C]// Proceedings of the 1st ACM Conference on Embedded Network Sensor Systems.New York,USA:ACM Press, 2003:266-279.
[4]楊歆豪,陸錦軍,王執(zhí)銓.無線傳感器網(wǎng)絡(luò)中基于最小速率的擁塞控制算法[J].信息與控制,2010,39(5): 513-518.
[5]Maciej Z,Sarangapani J.Predictive Congestion Control Protocol forWirelessSensorNetworks[J].IEEE TransactionsonWirelessCommunications,2007, 6(11):3955-3963.
[6]石為人,唐云建,王燕霞.基于擁塞控制的無線傳感器網(wǎng)絡(luò)數(shù)據(jù)匯集樹生成算法[J].自動學(xué)報,2010, 36(6):823-828.
[7]胡壽松.自動控制原理[M].北京:科學(xué)出版社,2007.
[8]Chen Shu-Ching,Shyu Mei-Ling,Zha Cheng-jun,et al.A Novel Rate-based Hop-by-Hop Congestion Control Algorithm[C]//ProceedingsofIEEEInternational Conference on Multimedia and Expo.Washington D.C., USA:IEEE Press,2004:245-248.
[9]楊育榮,陳星陽,王保印,等.基于趨近律的離散滑模位置跟蹤控制[J].指揮控制與仿真,2008,30(2): 42-44.
[10]劉金琨.滑模變結(jié)構(gòu)控制[M].北京:清華大學(xué)出版社,2012.
[11]王宏偉,井元偉.一類不確定離散網(wǎng)絡(luò)系統(tǒng)的全局滑模控制[J].系統(tǒng)工程與電子技術(shù),2011,33(6):1367-1406.
編輯 金胡考
Wireless Sensor Network Congestion Control Based on Sliding-mode Variable Structure
CHEN Shu,WANG Fudong
(School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China)
A new hop-to-hop congestion mathematical model between the network-layer and the link-layer is presented based on the tank balance relationship of the inflows and outflows for the node-congestion control in Wireless Sensor Network(WSN).The congestion control model is simpler than ever before and is easy to implement and a discretesliding mode controller is designed based on the reaching-law.The simulation results show that the proposed model is better than the traditional PID and fuzzy control in terms of response and delay.
Wireless Sensor Network(WSN);congestion control;discrete sliding-mode control;reaching-law;slidingmode variable structure
陳 樹,王夫棟.基于滑模變結(jié)構(gòu)的無線傳感器網(wǎng)絡(luò)擁塞控制[J].計算機工程,2015,41(3):37-40,46.
英文引用格式:Chen Shu,Wang Fudong.Wireless Sensor Network Congestion Control Based on Sliding-mode Variable Structure[J].Computer Engineering,2015,41(3):37-40,46.
1000-3428(2015)03-0037-04
:A
:TP393
10.3969/j.issn.1000-3428.2015.03.007
國家自然科學(xué)基金資助項目(21206053);江蘇省“六大人才高峰”基金資助項目(2012-WLW-006)。
陳 樹(1969-),男,副教授,主研方向:過程控制與優(yōu)化,無線傳感器網(wǎng)絡(luò);王夫棟,碩士研究生。
2014-03-28
:2014-05-19E-mail:dongliangongsi2008@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19