雙目光電綜合偵察平臺設計及信息處理
2015-02-20 07:31:40金曉會楊衛鄧立齊
中國測試 2015年10期
金曉會楊 衛鄧立齊
(1.中北大學電子測試技術重點實驗室,山西 太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,山西 太原 030051)
雙目光電綜合偵察平臺設計及信息處理
金曉會1,2,楊 衛1,2,鄧立齊1,2
(1.中北大學電子測試技術重點實驗室,山西 太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,山西 太原 030051)
為檢測定位高危特殊環境下的目標,設計一種雙目光電綜合偵察平臺。平臺主要集成非平行式雙目紅外熱像儀、激光測距、云臺等裝備,整體結構呈U型。平臺設計的兩個熱像儀性能一致且光軸交叉,根據最小二乘法可計算出目標的運動軌跡,同時根據目標速度選擇激光測距或雙目紅外熱像儀測距方式,以獲取目標的準確距離,完成目標的最終定位。該平臺可代替偵察人員檢測高危區域。
光電平臺;目標定位;雙目視覺;激光測距
0 引 言
光電綜合偵察系統經過了半個多世紀的發展,其配備已經從簡單的光學瞄準具發展為集雷達、激光測距、電視跟蹤等高端設備為一體的多功能偵察系統[1-2]。美國在這方面的研究一直處于領先地位,設計了LRAS3系統,該系統為一種地面作戰監視系統,用于“斯特賴克”裝甲車和防地雷反伏擊車等平臺,采用多傳感器紅外系統,能夠在低可見度條件下工作[3];英國科研機構設計了“蛇眼”系統,采用實時視頻流信息處理方式為乘員提供作戰現場目標信息。目前光電綜合偵察平臺具有自主搜索、目標檢測、目標跟蹤識別功能[4],而應用層面也由原來的簡單背景偵察變為復雜地形、軍事戰場、高危地帶的險情偵察[5],起到了越來越重要的作用。
為了更好地提升光電綜合偵察平臺的定位精度,達到戰場無死角、高準確度偵察需求,改變傳統的單目視覺偵察平臺,以雙目雙向定位方式鎖定目標,設計了一種雙目光電綜合偵察平臺。該雙目光電綜合平臺主要集成了兩個性能一致的紅外熱像儀、2 000 m量程激光測距機和全自動雙自由度云臺等設備,能夠通過雙目視覺定位方法檢測運動目標軌跡和目標當前與平臺的實際距離。
1 雙目光電綜合偵察平臺一體化設計
雙目光電綜合偵察平臺核心傳感器為兩個性能一致的紅外熱像儀,在內部設計中,熱像儀A與熱像儀B對稱于中心軸密封在兩側,兩個熱像儀光軸夾角為θ,激光測距發送器與接收器平行放置于中間。如圖1所示為內部排列構成,圖2為傳感器組主視圖。
圖1 內部構成

圖2 傳感器組(單位:mm)
整個光電綜合偵察平臺集成了伺服云臺、紅外熱像儀、激光測距儀、內部處理電路等。其中云臺為高精度雙自由度可控型云臺,可完成傳感器組的水平旋轉和垂直運動;傳感器組主要用于收集外部信息;信息處理單元主要控制傳感器運行和對傳感器收集到的信息進行處理。圖3為光電偵察平臺一體化結構設計,整體構架采用U型支撐構架,U型構架具有安全系數大、抗干擾能力強、剛度強等特點[6],能夠提高戰場中平臺的抗打擊能力。

圖3 整體結構設計
2 雙目光電綜合偵察平臺信息處理技術
光電綜合偵察平臺工作原理如圖4所示,其工作流程為,首先在紅外檢測系統中植入圖像算法檢測可疑目標,一旦發現有可疑目標后,在圖像坐標系上通過跟蹤框標記對目標進行跟蹤,此時雙目紅外熱像儀定位系統將對目標的軌跡進行計算,同時檢測運動目標的運動速度,通過設置速度閾值,選擇激光測距或雙目紅外熱像儀測距,得到目標準確的距離,最終定位出目標的具體方位。
圖4 光電綜合偵察平臺工作原理
2.1 雙目紅外熱像儀定位原理
圖5 雙紅外熱像儀成像
該平臺采用性能一致的兩個紅外熱像儀,兩個熱像儀的光軸交叉,當目標出現在感知畫面中,兩個紅外熱像儀將在同一時間收集目標在同一地點出現的兩種狀態。系統的成像原理如圖5所示,紅外熱像儀焦距為f,W為基準線,兩個光軸的夾角為θ。
定位原理是根據兩個紅外熱像儀在同一時間拍下相同場景中的兩幀照片來實現目標定位[7-8],如圖6所示。假設熱像儀A和熱像儀B具有相同的焦距f和像素尺寸D,A熱像儀的坐標系是O1x1y1,B熱像儀的坐標系是O2x2y2,x1O1y1平面和x2O2y2平面在同一個平面上,假設C1坐標系為世界坐標系,設外界有任意一點M,m1表示MO1與A熱像儀焦平面I1的相交點,m2是MO2與B熱像儀焦平面I2的相交點,由于光軸z1、z2分別垂直于I1、I2平面,所以I1和I2分別平行于x1軸和x2軸,而A的光學中心O1與B的光學中心O2的距離為W,O1O2是A坐標系的x軸,MO1O2平面和兩個焦平面I1、I2的交叉線分別為E1、E2,此時如果A坐標系沿著y軸旋轉θ度,A坐標系將完全重合于B坐標系。
圖6 雙目視覺定位原理
空間點M所在的坐標系是(X1,Y1,Z1),而圖像平面中m1點像素坐標為(u1,ν1),m2的像素坐標為(u2,ν2),則有M坐標為

式中 (u0,ν0)是紅外熱像儀A的光軸與圖像平面I1的交叉點,b=f/d(d為目標在每幀圖像中行走的距離)。對于u1、u2、ν1、ν2,由于他們是理想坐標系,而實際應用中應考慮攝像頭畸變引起的徑向因素。
目標運動軌跡可通過多幀圖像計算出來,采用雙目立體視覺計算多幀圖像的位置(Xn,Yn,Zn),n代表幀號,獲取10幀圖像,根據最小二乘法擬合計算出目標運動軌跡。
2.2 測距原理
平臺設計中集成了兩種測距技術,分別是雙目測距和激光測距,兩種測距方法各有優缺點,只有集成兩種測距方案才能對目標準確測距。雙目紅外熱像儀在目標靜止和緩慢移動時測距準確性較高,然而當目標快速移動時,雙目視覺就無法滿足實時性的需求,在實際應用中容易錯過快速移動的目標。激光測距模塊具有實時性好,測距頻率高和體積小的特點,能夠及時向指揮部匯報目標距離信息,然而存在激光光束無返回值和返回錯誤目標信息的情況,測距結果相對穩定性較差。實際作業時,根據目標的速度決定采用測距方式,設置速度閾值為ν0,當檢測到的目標速度<ν0時,采用雙目紅外熱像儀測距,當速度≥ν0時,采用激光測距。
2.2.1 激光測距原理
平臺采用脈沖式激光測距傳感器,在測距原點向測得的目標發射一束激光,光照射到目標上反射回的一部分激光被激光接收器接收,假設激光從發射到接收總時間為Δt,則被測目標距離激光測距傳感器的距離為

式中:R——目標與激光測距的距離;
c——大氣光速[9-10]。
激光信息處理器接收到上級的發射指令后,控制激光器產生激光脈沖,經準直后發向目標,少量返回的激光進入到采樣電路中形成回波信號,接收光學系統將回波信號經放大、濾波等處理檢測出光回波信號,并與主波一起發送給激光信息處理器。經過信息處理器對主波和回波的信號時延精密測量,從而得到目標距離。
2.2.2 雙目紅外熱像儀測距原理
在世界坐標系中,目標運動軌跡上任意一點M都是可以通過雙目視覺定位原理實現的,點M坐標是(X1,Y1,Z1),激光測出的點M距離光電綜合偵察平臺的距離是L,在理想狀態下,非平行式紅外熱像儀測距原理如圖7所示。
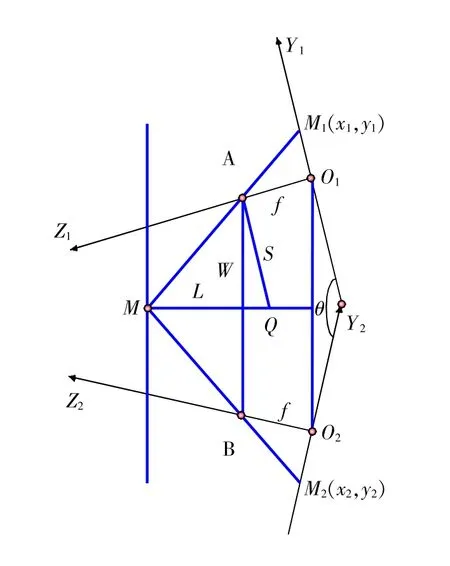
圖7 非平行式雙目測距原理
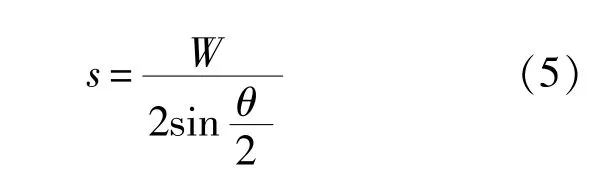
圖中,AQ為垂直于A攝像頭光軸的線段,設長度為s,則有:
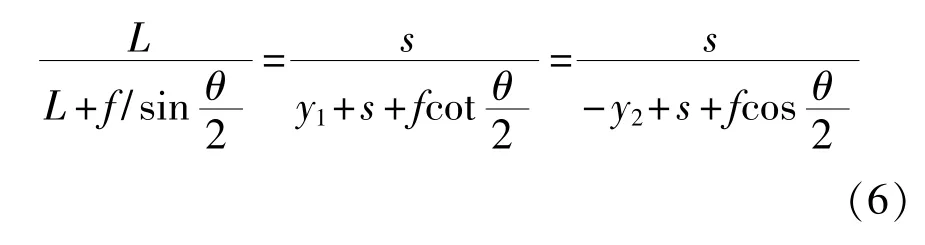
由圖7相似三角形關系計算可得:
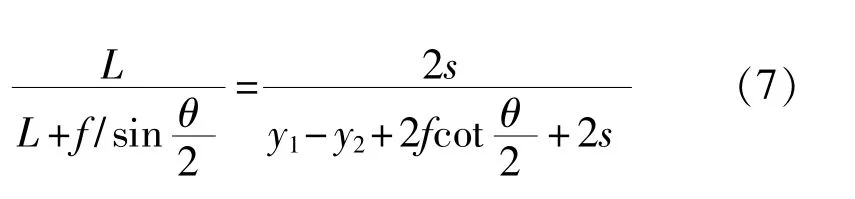
根據成像關系可得L長度為

3 結束語
設計了一種雙目紅外熱像儀的智能光電綜合偵察平臺,對該平臺的結構和信息處理技術進行了詳細描述。在光電綜合偵察平臺中添加雙目紅外熱像儀能夠提升整體平臺的感知能力,利用相關信息處理技術可以計算出目標的運動軌跡和實際距離。該光電綜合偵察平臺可應用于高危場景下的目標感知,能夠增加戰場作戰能力。
[1]陸君,呂彤光.光電探測技術在火控系統中的應用及發展[J].紅外與激光工程,2012,41(4):1047-1051.
[2]劉光燦,白廷柱.輕武器新型智能光電火控系統設計[J].紅外技術,2005,27(3):207-209.
[3]Battery power Group.Saft Wins$1.2 Million DLA Contract to Improve the ALPS Battery for the Long-Range Advanced Scout Surveillance System[J].Battery power,2013,17(2):26-26.
[4]鄧洪高,王國富,孫少帥,等.光電跟蹤系統高速運動目標快速跟蹤算法[J].光通信技術,2012,36(3):53-55.
[5]馬超杰,楊華,李曉霞,等.復雜場景多傳感器圖像的多目標分割算法[J].光電工程,2009,36(1):47-51.
[6]解志紅,楊似瓊,游小嘉,等.光電綜合搜索平臺動態性能仿真與分析[J].火力與指揮控制,2014(z1):64-65.
[7]祝琨,楊唐文,阮秋琦,等.基于雙目視覺的運動物體實時跟蹤與測距[J].機器人,2009,31(4):327-334.
[8]胡天翔,鄭加強,周宏平,等.基于雙目視覺的樹木圖像測距方法[J].農業機械學報,2010,41(11):158-162.
[9]吳健,吳星明,陳偉海,等.三維景深數據采集和圖像重構系統研究[J].中國測試,2011,37(4):1-4.
[10]施智勇,潘曉聲,張謙,等.利用延時法進行高精度脈沖激光測距[J].光學精密工程,2014,22(2):252-258.
Binocular electro-optical search platform design and information processing
JIN Xiaohui1,2,YANG Wei1,2,DENG Liqi1,2
(1.Science and Technology on Electronic Test&Measurement Laboratory,North University of China,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science&Dynamic Measurement Ministry of Education,North University of China,Taiyuan 030051,China)
A binocular electro-optical search platform was proposed to locate the target in special and dangerous environments.The platform in a U-shaped structure is chiefly integrated with a nonparallel binocular infrared system,a laser rangefinder and a cradle head.Moreover,it is provided with two thermal imagers with the same performance and crossing axis to calculate the trajectory of the target by least squares.Meanwhile,laser rangefinders or binocular infrared thermal imagers are selected according to the speed of the target to measure the accurate distance and target location.The platform can be used as a substitute for scouts in special and dangerous environments.
electro-optical search platform;target location;binocular vision;laser rangefinder
A
:1674-5124(2015)10-0104-04
10.11857/j.issn.1674-5124.2015.10.023
2015-01-29;
:2015-03-05
金曉會(1988-),女,遼寧朝陽市人,碩士研究生,專業方向為圖像檢測與目標識別。
