工業機器人奇異位形分析
2015-02-15 03:10:48王春暖秦亞萍李偉娟
橡塑技術與裝備 2015年18期
關鍵詞:分析
王春暖,秦亞萍,李偉娟
(包頭職業技術學院數控技術系,內蒙古 包頭 014030)
工業機器人奇異位形分析
Singularity analysis of industrial robots
王春暖1,秦亞萍2,李偉娟3
(包頭職業技術學院數控技術系,內蒙古 包頭 014030)
奇異位形是工業機器人機構的固有特性,當工業機器人處于奇異位形時,對于給定的軌跡控制和運動控制都無法準確實現,本文對工業機器人出現奇異位形的原因進行了簡單分析,為初學者在操作機器人時避免奇異位形或是解決機器人通過奇異位形進行軌跡控制提供一點參考。
機器人;自由度;奇異性,奇異點
工業機器人是集機械、電子、控制、計算機、傳感器、人工智能等多學科先進技術于一體的現代制造業重要的自動化裝備,在提高產品質量與數量,保障人身安全,改善勞動環境,減輕勞動強度,提高勞動生產率,節約原材料消耗以及降低生產成本方面有著十分重要的作用。工業機器人技術也因此吸引了越來越多的不同專業背景的科技技術人員的關注和研究。
在操作工業機器人的過程中有時會遇到一些奇異位姿,導致機器人無法按預定的軌跡和運動進行控制,例如圖1所示幾種位姿。這就是所謂的工業機器人的奇異位形。奇異位形是工業機器人機構的固有特性,的解決有著十分重要的實際意義。本文從奇異性分析奇異點來分析了工業機器人產生奇異位形的原因。
1 奇異性分析
奇異位形是工業機器人機構的一個重要的運動學特性 ,它是指機械手的工作空間中 ,手部參考點不能實現沿任意方向的微小位移或轉動時相應機械手的位形,或是機器人機構處于自鎖狀態或失控狀態。工業上可以利用機構的奇異性實現一些應用,例如用自鎖點位置來保證飛機起落架工作時的安全,以及沖壓機構在接近極限位置開始沖壓,但如果奇異位形出現在當機器人處于奇異位形時,如何在保證機器人工作性能和運動精度的前提下使其通過奇異位形是機器人應用的關鍵技術之一,所以分析其產生的原因對該問題機器人工作空間或所期望的運動范圍內,這種奇異性將會消弱機器人的工作能力,使機器人機構達不到預期的位置。
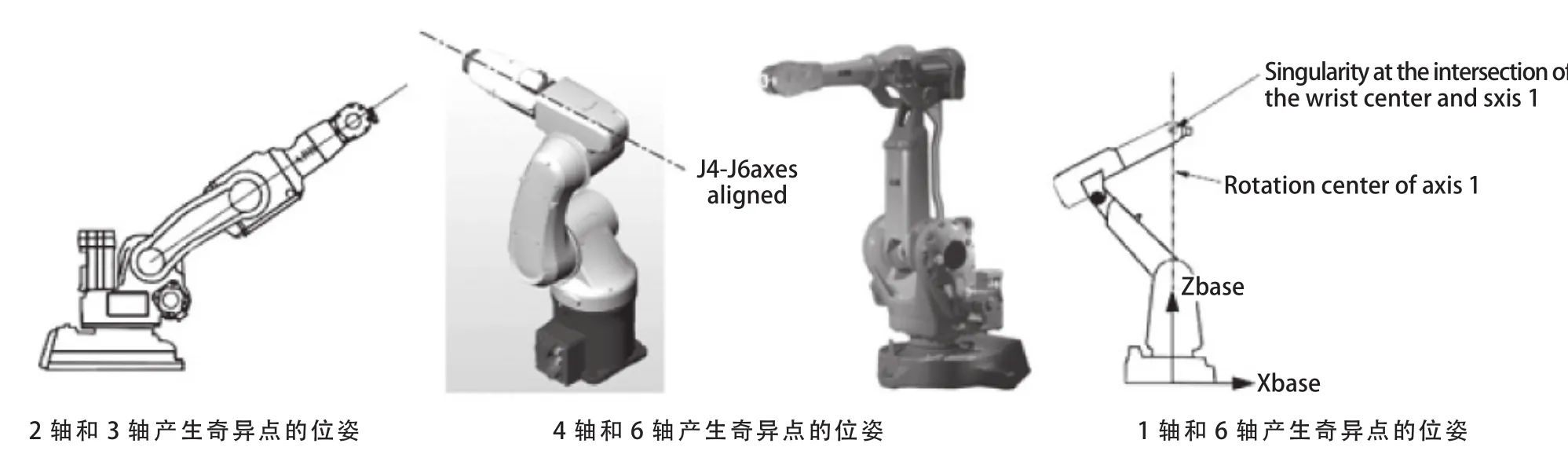
圖1 機器人常見奇異點位姿
當工業機器人發生機構奇異時,其表現形式分多種:在代數學上表現為雅可比矩陣奇異;幾何學上表現為關節軸線線性相關;運動學上表現為操作器失去一個或多個自由度;靜力學上表現為一個或多個力螺旋對操作器不產生任何運動影響。因此,可以從不同的角度對機器人奇異位形進行分析。
奇異位形有兩種類型,第一類是邊界奇異位形,它出現在機器人執行器位于工作區的邊界時,這種奇異位形不是很嚴重,只要控制執行器遠離工作區邊界就可以。第二類是內部奇異位形,如果出現兩個或兩個以上關節軸線發生線性相關時,因為這種情況可能出現在工作區的任何位置,這種奇異位形很難處理。
當機器人運動到奇異位置時 ,產生的不良影響主要表現在三個方面 。
第一,使機器人實際操作自由度減少 ,從而執行器無法實現沿著某些方向的運動, 同時減少了獨立的內部關節變量數目。第二,某些關節角速度趨向無窮大, 引起機器人失控, 導致執行器偏離了規定的軌道。第三,使雅可比矩陣退化, 從而所有包括雅可比的求逆運算控制方案無法實現。
2 奇異點是如何產生的

圖2 簡單機器人
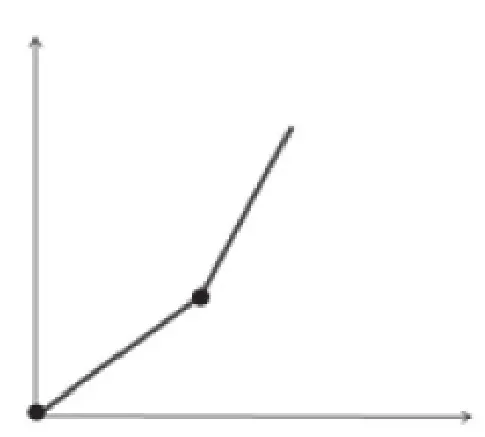
圖3 簡化模型
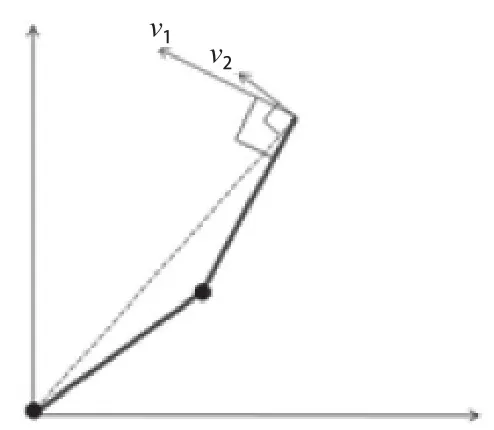
圖4 矢量圖1
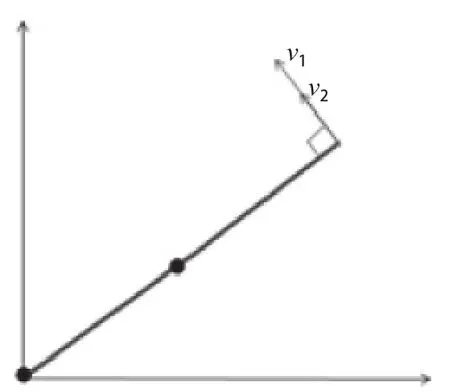
圖5 矢量圖2
以圖2中簡單的機器人來解釋奇異點的產生。這個機器人實際上有4個自由度:3個平動(x,y,z)加1個轉動(z)。我們在此基礎上再簡化一下,留下2個平動(x,y),相當于我們只考慮在一個平面上的(x,y)坐標。簡化模型如圖3:這個機器人很直觀啦,你可以控制兩個旋轉關節來改變機器人的端點坐標。
這個機器人的奇異點是什么呢?其實奇異點可以通過觀察機器人端點的速度合成得到。比如在當前的姿態下,機器人的端點可以產生的速度是由兩個速度合成的:v1和v2,如圖4。v1是由第一個旋轉關節產生的;v2是由第二個旋轉關節產生的;可以看到兩個速度矢量v1和v2在平面上沒有共線,它們是獨立的(記得線性代數里面的independent和dependent么)。機器人的端點可以產生的速度就是這兩個矢量的合矢量,這個合矢量可以是任意的嗎?來看兩個分矢量:這兩個矢量的方向是定了的(在這一瞬間),但是大小呢?大小是可變的,而且正比于相應的轉動關節的角速度。(線速度=角速度×距離)可以知道在v1和v2不共線的情況下,我們是可以通過調整v1和v2的大小來得到任意的合速度的(大小和方向)。
但是,當機器人處于圖5這個姿態的時候:可以看到兩個速度矢量v1和v2在平面上共線了,它們是不獨立的(independent)。這個情況很直接,無論你怎樣改變v1和v2的大小,你都只能合成出和v1(v2)方向相同的速度。這就意味著你的機器人端點的速度不是任意的了,你只能產生某個方向上的速度。這樣機器人就奇異了。
4 結論
在實際操作工業機器人的過程中出現奇異點的幾率很小,出現奇異點后機器人不能動作,會報警,大多數情況下只能是重新復位,使能。
綜上分析,目前解決機器人奇異位形的方法主要有兩類:一是盡可能找出所有的奇異點,運動規劃時避開奇異位置;二是路徑穿越奇異點時規劃滿足某些條件的關節速度,使機器人的工作不受干擾。
[1] 胡準慶等.機器人奇異性分析,《機器人技術與應用》.
[2] Wikipedia, Gimbal Lock.
[3] Six-axis robot configuration singularities, Use of the V+MV.SL_Move routine and the speed.limit parameter. Adept.
[4] ABB Robotics, technical reference manual, rapid overview.
TP242
1009-797X (2015) 18-0111-02
A
10.13520/j.cnki.rpte.2015.18.043
王春暖(1981-),女,包頭職業技術學院講師主要從事數控技術教學和研究工作。
2015-08-11
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06