無人機激光雷達技術在山洪災害調查評價中的應用
2015-01-30 05:23:10劉昌軍張琦建唐學哲
中國水利 2015年21期
劉昌軍 ,孫 濤 ,張琦建 ,唐學哲 ,郭 良
(1.中國水利水電科學研究院,100038,北京;2.河南省水利信息中心,450003,鄭州;3.河南省水下救助搶險隊,450003,鄭州)
一、背景及概況
采用無人機雷達航測技術完成了河南省欒川縣協心小流域的激光雷達數據和分辨率優于0.2 m的航拍影像數據獲取,按照航測技術要求加工制作了欒川協心小流域內的高精度DEM(數字高程模型)、DLG(數字線劃地圖)、DOM(數字正射影像)數據,根據山洪災害調查評價野外測量有關技術要求和山洪災害調查評價有關技術要求,利用開發的軟件自動提取了沿河村落居民戶位置、高程數據和河道縱橫斷面數據,并利用GNSSRTK對測區內的數據進行了精度對比分析。
通過對無人機激光雷達數據處理關鍵技術的研究,提出了利用激光點云數據直接提取建筑物邊界和高程坐標的計算方法以及基于激光點云數據批量獲取河道斷面的數據處理方法。基于上述算法,開發了無人機激光雷達數據處理軟件。此軟件大大提高了激光點云數據的處理效率,直接獲取山洪災害調查評價所需的數據,有利于該技術在全國山洪調查評價項目中的推廣應用。
二、無人機激光雷達航測設備及技術優勢
1.無人機激光雷達設備組成及原理
欒川協心小流域無人機機載激光雷達設備為奧地利某公司最新推出的無人機掃描系統。無人機掃描系統由最大載荷15 kg的AF-25B型無人直升機搭載RIEGL VUX-SYSTEM激光雷達掃描系統,該掃描系統由激光雷達掃描系統、相機和POS系統等組成。考慮到無人機載重問題,高清航拍數據是由固定翼無人機搭載相機獲取的。
RIEGL VUX-SYSTEM主要包括加拿大某公司的高性能、高集成度、超輕的慣性導航系統和RIEGL VUX-1雷達系統等。整個掃描系統重量約為8 kg,為目前全球最輕、專業測量級的無人機掃描系統。RIEGLVUX-1雷達測量精度為10 mm,掃描速度為200線/s,每秒可獲取55萬點。激光發射頻率高達550 kHz,最大測量高度為900 m,掃描視場角可達330°,完全的平行線掃描,激光點分布均勻。
2.無人機激光雷達技術應用優勢
無人機激光雷達技術在山洪災害調查評價中具有以下優勢:
①現場作業速度快、數據精度高,適合小范圍高精度數據獲取;可通過對點云數據的分類處理,快速自動獲取山區小流域 DEM、DLG、DOM等數據。
②實施周期短、成本低,激光雷達可穿透植被,能夠得到地表和地面的各種高精度數據產品。
③利用數據處理軟件,可快速、高效、批處理得到河道地面點云、縱橫斷面圖、河道糙率、河道斷面數據和居民戶高程數據等,彌補了人工實測效率低、不連續、不直觀的不足。
綜上所述,老年骨科患者行硬膜外麻醉處理較全身麻醉處理具備更高的應用價值,可有效降低老年患者術后認知功能障礙的發生率,因此,值得臨床使用并推廣。
④結合專業水文分析模型,可大大提高山丘區小流域洪水計算和預報精度,高精度數據可用于繪制山丘區小流域的洪水風險圖。
三、現場數據采集
本次示范區范圍為河南省欒川縣協心小流域。
欒川縣位于河南省西部,總面積2478 km2,東西長 78.4 km,南北寬57.2km。全縣境內有伊河、小河、明白河、淯河等四大河流,分屬黃河、長江水系。大小支流604條,河網密度0.59km/km2。其地勢西南高而東北低,地貌起伏跌宕,形成中山、低山和河谷三種類型。
協心小流域主干流為陶灣南溝,流域面積54 km2,其流域周長為44 km,沿河有4個村69個自然村組。利用無人機航拍共完成141km2的0.1m分辨率的影像數據。利用無人機雷達獲取了河道內約50km2的激光點云數據,點間距約為0.05 m。
四、激光點云數據處理關鍵技術及軟件開發
采用C++和OPENGL語言自主研發了三維可視化無人機激光點云數據處理軟件。該軟件是一款操作簡便、可視化功能強大的三維激光點云處理軟件,具有數據管理與分析、激光點云刪除與合并處理、激光點云分類(地面點云和非地面點云分類、建筑物和植被的分類、基于多分辨率的點云監督分類等)、激光點云變形比較、多尺度的點云比較算法、系統控制和制圖輸出等功能。
1.激光點云地面點和非地面點分類
利用基于網格分塊的植被過濾技術對協心小流域激光點云數據進行分類,可分為地面點數據和非地面點數據兩類。具體分類算法步驟如下:
①對原始LiDAR點云數據所在區域建立格網,對點云數據按照格網劃分,建立格網和點云索引。
②選取格網內最低點,建立初始稀疏TIN模型。
③逐格網計算各點距TIN網內的距離,并將當前格網內的數據按高程順序排列。將大于2/3距離高度的點歸為植被點,其他歸為地面點類,并遍歷所有格網。
④逐步建立漸進TIN,重復“步驟③”,直到每個格網內地面點高度小于給定閾值。
2.建筑物自動提取算法
利用上述算法將激光點云分為地面點云和非地面點云兩類,從非地面點云中利用拓撲聚類的方法對每個建筑物進行識別,并自動提取建筑物的輪廓和中心點坐標,計算建筑物中心點處的地面點高程。具體計算流程見圖1。
3.斷面批量生成技術
利用作者等提出的基于激光點云數據的河道斷面批量處理方法,對地面激光點云數據進行縱橫斷面提取。具體提取算法見本文參考文獻《三維激光掃描技術在山洪災害調查中的應用》。
五、數據精度對比分析及主要成果

圖1 建筑物自動提取流程圖
利用無人機可以獲取高精度地形和影像數據,以協心小流域為樣例,采用GNSS RTK測量技術獲取了部分居民戶和河道斷面測量數據,經與激光點云數據對比分析,發現無人機激光雷達測量數據精度較高。選取倉房組、下河西組、楊莊組、河柳樹溝組中344個GPS測量點和激光點云數據制作出分布圖(略),經軟件自動對比分析,所有測試點中誤差為0.22m,其中高程誤差在0.2 m以內的有289個點,占GPS測量總點數的84%;高程誤差在0.5 m以內的有317個點,占GPS測量總點數的92.3%(測量規范中的山丘區高程誤差為0.5 m)。
個別測試誤差較大點位置基本位于建筑物區域,主要原因是由于房屋遮擋或GPS測量點和無人機的測量點不在同一位置。造成誤差較大的點的具體原因包括:①由于lidar點云數據的平面誤差,GPS測到變坡點最低點平面位置并不是激光點測到的最低點,進而由于位置偏差而產生高程誤差。②由于植被過濾不干凈或局部有小土堆,造成激光點云與GPS測點的高程誤差較大。③因為建筑物遮擋,激光點云沒有測到最低地面點,造成激光點云與GPS測點的高程誤差較大。
本項目共完成141 km2的無人機激光雷達航測數據獲取,并按照《山洪災害調查技術要求》對數據進行了處理,獲取了項目范圍區的1∶2000比例尺精度要求的 DEM、DLG、DOM數據成果,及河道斷面數據、居民戶(建筑物)位置坐標和高程。圖2~圖6為協心小流域航測數據局部成果的展示。
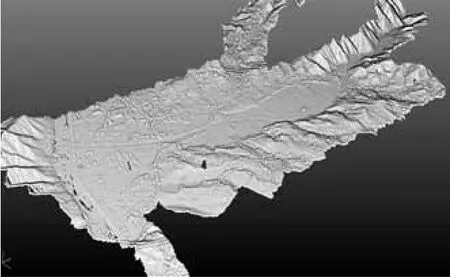
圖2 協心小流域的部分激光點云數據

圖3 協心小流域高精度DEM數據
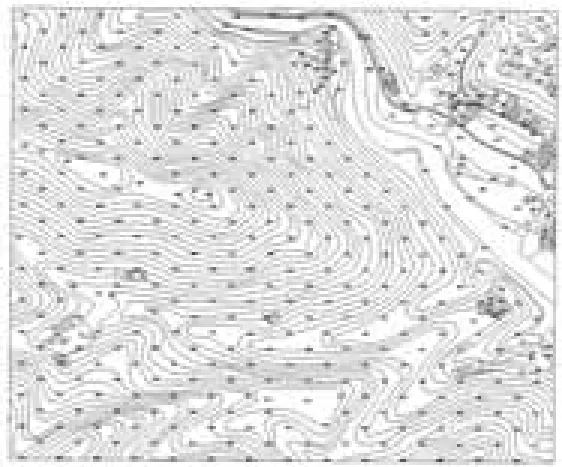
圖4 協心小流域局部地區地形圖

圖5 激光點云生成的河道橫斷面圖
六、結 論
(1)首次應用無人機激光雷達技術進行山丘區復雜三維地形環境下的激光點云數據獲取,數據獲取速度快、精度高。該技術可以在全國山洪災害調查評價工作中進行推廣應用。
(2)開發了滿足全國山洪災害調查評價有關技術要求的激光點云數據處理軟件,可以快速獲取項目要求的成果,極大地方便了項目應用。
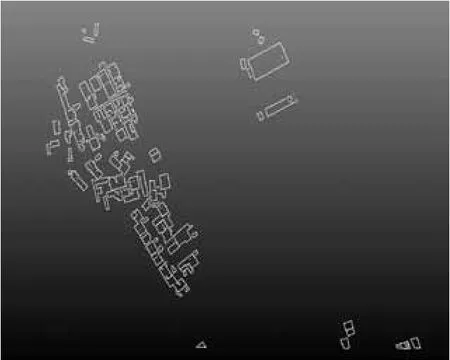
圖6 居民戶位置和宅基高程圖
(3)項目獲取的數據精度高,數據信息量大,且較為豐富。數據成果可為山洪災害的暴雨洪水計算、災害預警預報提供支撐,可在防災減災、生產建設項目水土保持監測等方面進一步推廣應用。
[1]郭良,劉昌軍,等.開展全國山洪災害調查評價的工作設想[J].中國水利,2012(23).
[2]劉昌軍,郭良,岳沖.無人機航測技術在山洪災害調查評價中的應用[J].中國防汛抗旱,2014(3).
[3]張小紅.機載激光雷達測量技術理論與方法[M].武漢:武漢大學出版社,2007.[4]劉昌軍,丁留謙,孫東亞.三星堆月亮灣城墻遺址覆土方量計算[J].水利水電科技進展,2011(2).
[5]劉昌軍,丁留謙,孫東亞.基于激光點云數據的巖體結構面全自動模糊群聚分析及幾何信息獲取 [J].巖石力學與工程學報,2011(2).
[6]李松霖,范海生,陳秀萬.基于特征線匹配的城市建筑物識別方法研究[J].遙感技術與應用,2012(2).
[7]劉昌軍,黃乾,唐瑜,等.基于 FCM的機載LIDAR數據的建筑物和植被分類方法 [J].中國水利水電科學研究院院報,2013(3).
[8]劉昌軍,岳沖,梁學文.三維激光掃描技術在山洪災害調查中的應用[J].中國水利,2015(11).