基于MRAS的無速度傳感器的異步電機矢量控制
2015-01-27 01:30:36左瑞
機電產品開發與創新 2015年6期
關鍵詞:模型
左 瑞
(宿豫中等專業學校,江蘇 宿遷 223800)
0 引言
采用帶速度閉環控制的矢量控制技術,可使異步電機獲得較高的調速性能。但在一些高溫、低溫、易燃、易爆的環境,速度傳感器的適應能力較差,直接影響調速系統的可靠性,另外安裝速度傳感器會增加系統的成本。因此研究無速度傳感器的矢量控制技術,對提高交流調速系統的可靠性、對環境的適應性,進一步擴大交流調速系統的應用范圍具有極其重要的意義。
1 帶轉矩內環的轉速、磁鏈閉環矢量控制系統
帶轉矩內環的轉速、磁鏈閉環矢量控制系統如圖1所示。主電路采用電流滯環PWM 逆變器;控制電路中,轉速環后增加轉矩控制內環,轉速調節器ASR 的輸出作為轉矩控制器ATR 的給定,轉矩反饋信號經矢量控制方程求得;電路中的磁鏈控制器ApsiR 用于對電動機磁鏈的控制,并設置了電流變換和磁鏈觀測環節;ATR 和ApsiR 的輸出分別是定子電流轉矩分量和勵磁分量的給定值,兩者經過2r/3s 變換得到三相定子電流的給定值,并通過電流滯環PWM 控制器控制電動機定子的三相電流,最終實現矢量控制。若將圖1 的速度檢測環節去掉,根據相關模型對轉速進行準確估算,并把估算值反饋給速度控制器,就能獲得無速度傳感器的異步電機矢量控制系統。
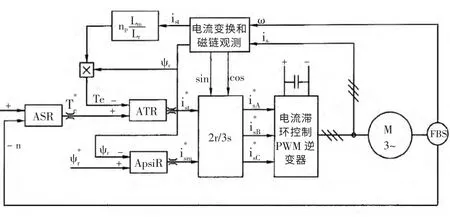
圖1 帶轉矩內環的轉速磁鏈閉環異步電機矢量控制系統Fig.1 The inner ring with torque,speed、flux closed-loop vector control system of asynchronous motor
2 基于MRAS 的轉速自適應辨識
如何對轉子速度進行準確的估計是無速度傳感器矢量控制技術的核心問題,因為轉速辨識的精確程度直接關系到系統性能的好壞。本文采用基于模型參考自適應法(MRAS)的轉子磁鏈電壓、電流模型完成轉子速度的在線辨識。其基本思想是:選定不包含待估計轉速參數的轉子磁鏈電壓方程作為參考模型;選定包含待估計轉速參數的轉子磁鏈電流方程作為可調模型;兩模型輸出相同的物理量“磁鏈”;利用兩模型輸出量的偏差構成合適的自適應律去調節可調模型的參數,來實現可調模型的輸出(轉子磁鏈的推算值)跟蹤參考模型的輸出(轉子磁鏈的期望值),最終使轉速估計值逼近轉速實際值。式(1)和式(2)給出了α、β 坐標系下,異步電動機轉子磁鏈的電壓模型和轉子磁鏈的電流模型:
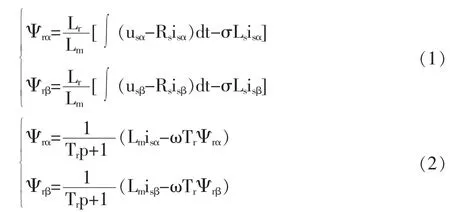
式中:usα、usβ、isα、isβ分別為兩相靜止坐標系下定子繞組電壓和電流;Rs—定子繞組電阻;Ls、Lr、Lm分別定子電感、轉子電感、定轉子互感;Tr—轉子電磁時間常數,Tr=Lr/Rr;σ—漏磁系數,σ=1-Lm2/(LsLm)。
根據Popov 超穩定性理論,選比例積分自適應律,得轉子角速度的辨識如式(3):

式中:Ψ*rα、Ψ*rβ—由轉子磁鏈電壓模型計算的轉子磁鏈;Ψ^rα、Ψ^rβ為由電流磁鏈模型計算的轉子磁鏈。圖2 給出了基于MRAS 的轉速自適應辨識系統模型。

圖2 基于MRAS 的轉速自適應辨識系統模型Fig.2 The model of speed adaptive recognition system based on MRAS
3 基于MRAS 的無速度傳感器矢量控制系統仿真
以圖1、2 為基礎,在Matlab 中搭建了基于MRAS的無速度傳感器矢量控制系統仿真模型如圖3 所示。

圖3 無速度傳感器矢量控制系統仿真模型Fig.3 The simulation model of speed sensorless vector control system
該模型主要包含異步電動機模塊、電流滯環PWM逆變器模塊、轉子磁鏈觀測模塊、轉速估計模塊、矢量控制及PI 調節器模塊等。
異步電機模型主要參數參考文獻[2]:電壓380V、50Hz、極對數2,Rs=0.435Ω,L1s=0.002mH,Rr=0.816Ω,L1r=0.002mH,Lm=0.069mH,J=0.19kg·m2,逆變器直流電壓510V,定子繞組自感,Ls=Lm+L1s=0.069+0.002=0.071mH,轉子繞組自感Lr=Lm+L1r=0.069+0.002=0.071mH,漏磁系數σ=1-Lm2/LsLr=0.056,轉子時間常數Tr=Lr/Rr=0.071/0.816=0.087。
電機空載啟動,用Step1、Step2、Step3 三個階躍信號模擬負載轉矩的變動;0.8 秒時Step1 單獨作用,階躍值為55;1 秒時疊加Step2,Step2 的階躍值為-30;1.2秒時又疊加上Step3,Step3 的階躍值為30。異步電機給定轉速1400r/min,設置好各調節器參數和系統的其他相關參數,運行仿真得矢量控制系統的轉速波形如圖4所示。

圖4 轉速波形Fig.4 Speed waveform
圖4 中帶有小幅波動的曲線是估計轉速,較為平滑的曲線是由測量單元獲得的實際轉速,不難看出兩者基本重合,這說明在電機啟動或負載突變時,估計轉速均能較好的跟隨實際轉速的變化。所估計轉速的動態降落很小,系統恢復時間較短,平穩性較好;這充分驗證了所設計的無速度傳感器矢量控制策略的正確性和參數設計的合理性。
4 結束語
以三相異步電機為被控對象,設計了帶轉矩內環的轉速、磁鏈閉環的異步電機矢量控制系統;介紹了基于MRAS 的轉速辨識方案,在Matlab 中搭建了無速度傳感器的異步電機矢量控制系統模型,并對系統進行了仿真分析;仿真結果表明所采用的控制策略控制效果良好,能在較大負載擾動下實現無傳感器方式的異步電機的穩定運行。
[1]張貞艷,左瑞.礦井提升機的無速度傳感器矢量控制[J].機電產品開發與創新,2014,11.
[2]洪乃剛.電力電子和電力拖動控制系統的MATLAB 仿真[M].機械工業出版社,2006.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
