
消防救援裝備新型安全制動機構(gòu)工作性能研究與仿真分析
2015-01-27 01:30:28羅繼曼崔艷楠李根標魏澤明
機電產(chǎn)品開發(fā)與創(chuàng)新 2015年6期
羅繼曼,崔艷楠,李根標,魏澤明
(沈陽建筑大學 機械工程學院,遼寧 沈陽 110168)
0 引言
消防救援裝備是一種置于建筑體外墻、能快速升降、用于火災救援的新型裝備,由主體裝備和轎廂兩部分組成,其主體裝備和轎廂工作時都需要制動與安全裝置。當消防救援裝備超過極限速度,如發(fā)生快速墜落時,則觸發(fā)安全制動機構(gòu)工作,使救援裝置減速并停止運行,從而起到安全防護作用。目前,機械設計中常用的安全制動裝置有施工升降機的防墜安全器、汽車使用的盤式剎車器等。這些制動形式均為齒輪制動或盤形制動,并沒有適用于軌道的制動方式[1~3]。
由于現(xiàn)有的安全制動裝置不能適用于新型消防救援裝備,很有必要研究新型的安全制動機構(gòu)。為此,設計了消防救援裝備新型安全制動機構(gòu),并對其結(jié)構(gòu)和工作性能進行研究。本文對消防救援裝備安全制動機構(gòu)進行了三維建模,使用ADAMS 仿真軟件進行了力學仿真分析,通過對電動缸推力曲線圖的分析與研究,使其性能滿足該類消防救援裝備的要求。針對適用于消防救援裝備的安全制動機構(gòu)的研究對此類裝備的安全運行具有重要的意義。
1 消防救援裝備安全制動機構(gòu)結(jié)構(gòu)設計與工作原理
結(jié)構(gòu)組成:消防救援裝備新型安全制動機構(gòu),如圖1(a)所示,圖中電動缸1、滑塊2、連桿3、曲軸4、底座5、銷軸6、楔形塊7 等7 部分組成。電動缸1 底部固定在消防救援裝備獨立轎廂上,上部與新型安全制動機構(gòu)的滑塊2 相連接;滑塊2 在工字鋼上滑動,并與連桿3用銷軸連接;連桿3 與曲軸4 長桿端之間由銷軸連接,且曲軸4 繞固定的底座5 轉(zhuǎn)動,曲軸4 短桿端由銷軸6與楔形塊7 連接,隨著曲軸的轉(zhuǎn)動,推動楔形塊7 上下移動。
工作原理:當消防救援裝備獨立轎廂超過極限速度,如發(fā)生快速墜落時,消防救援裝備上的速度傳感器工作并報警,隨即電動缸1 開始工作,拉動與電動缸1相連接的滑塊2 向下移動。滑塊2 帶動連桿3 向下移動,連桿3 帶動曲軸4 繞支座旋轉(zhuǎn)。曲軸短桿端推動楔形塊7 向套筒內(nèi)部移動,在套筒上側(cè)楔形塊擠壓下,楔形塊7 與工字鋼之間的空隙距離減小,直至接觸。通過楔形塊7 上所安裝的橡膠摩擦片與工字鋼之間產(chǎn)生的摩擦力,使消防救援裝備獨立轎廂減速、直至安全停止。這時裝置處于工作運動狀態(tài),三維圖如圖1(b)所示。

圖1 安全制動機構(gòu)Fig.1 The Safety Brake Mechanism
非工作運動狀態(tài)時,消防救援裝備安全制動機構(gòu)電動缸保持伸長狀態(tài),控制著滑塊使其不能夠上下運動,使楔形塊與工字鋼之間始終保持著安全距離,不會形成安全制動機構(gòu)非工作狀態(tài)下的制動。
裝置從工作狀態(tài)恢復到非工作狀態(tài)時,電動缸伸長,推動滑塊2 向上移動,進而帶動連桿、曲軸繞支座旋轉(zhuǎn),克服摩擦力帶動楔形塊7 向下移動,楔形塊與工字鋼之間的夾緊被放松,轎廂與安全制動機構(gòu)進行正常工作。
2 消防救援裝備安全制動機構(gòu)的相關(guān)計算
2.1 消防救援裝備安全制動機構(gòu)自由度計算
根據(jù)平面機構(gòu)的自由度計算公式,有:

其中:n 為活動構(gòu)件個數(shù);pl—低副數(shù);ph—高副數(shù)。圖1 中顯示消防救援裝備安全制動機構(gòu)共5 個活動構(gòu)件,分別是滑塊2、連桿3、曲軸4、銷軸6、楔形塊7,所以活動構(gòu)件n=5;低副包括移動副與轉(zhuǎn)動副,如圖2 中所示,低副pl=7;該安全制動機構(gòu)無高副,即ph=0。所以消防救援裝備安全制動機構(gòu)自由度為1。
新機構(gòu)的動力來源為電動缸,即該機構(gòu)的原動件為1 個,與機構(gòu)的自由度1 相等,所以該制動機構(gòu)具有確定的運動。
2.2 消防救援裝備安全制動機構(gòu)楔形塊位移計算
消防救援裝備安全制動機構(gòu)楔形塊的位移由上升位移與平動位移組成,且楔形塊的位移是當滑塊2 向下移動,帶動連桿與曲軸繞支座旋轉(zhuǎn)所產(chǎn)生的,所以現(xiàn)計算楔形塊7 位移與滑塊2 向下移動距離之間的關(guān)系,如圖2 所示。
計算所需各個參數(shù)的含義:xe代表滑塊上升距離、r 代表曲軸長桿端長度、e 代表偏心距、α 代表曲軸轉(zhuǎn)動角度,β 代表連桿與工字鋼之間角度。

圖2 安全制動機構(gòu)運動示意圖Fig.2 Schematic diagram of safety brake mechanism
λ=r/l,ξ=e/l;α 與β 之間的關(guān)系由△ABD 和△BCO 決定,即:

式(11)建立了滑塊位移xe與轉(zhuǎn)角α 之間的關(guān)系式,又因為曲軸4 分為長桿部分與短桿部分,且都旋轉(zhuǎn)了α角度,因此,楔形塊7 沿X、Y 軸的位移與xe的函數(shù)式表達如下,其中l(wèi)x代表楔形塊上升距離,ld代表曲軸短桿部分長度:
算例說明:根據(jù)安全制動機構(gòu)要求,當楔形塊上升10mm 時,消防救援裝備安全制動機構(gòu)就能夠使獨立轎廂安全停止。依據(jù)式(11)和(12)可以計算出滑塊向下移動的距離xe,也即電動缸收縮的行程。e=80mm。所以xe=14.3mm。當楔形塊7 向上移動了10mm 時,安全制動機構(gòu)完成制動工作時,電動缸帶動滑塊向下移動的距離為14.3mm。
2.3 消防救援裝備安全制動機構(gòu)制動力計算
消防救援裝備主要技術(shù)指標:裝備運動狀態(tài)額定乘員3 人,上升與下降速度不小于30m/min,裝備固定狀態(tài)下,救援吊艙可承載4 人,最大升降速度不小于40m/min。爬升系統(tǒng)整機自重1 噸,搭乘消防人員3 人,吊艙自重為400kg,吊艙運載能力為500kg,爬升速度為30m/min,電力驅(qū)動,吊艙上安裝兩個安全制動機構(gòu)。
消防救援裝備吊艙最大運載力時總質(zhì)量(注意不要用長字母):
Md=Mz+My=400kg+500kg=900kg
其中:Md代表吊艙最大運載力時總質(zhì)量;Mz代表吊艙自重;My代表吊艙最大運載力。考慮加速產(chǎn)生的慣性力,總摩擦力Fm為:
所以接觸力FN=48.6N
通過接觸力來反求電動缸所提供的制動力,接觸力與電動缸提供的制動力的力學示意圖如圖3 所示。其中:FN為接觸力,F(xiàn) 為制動力,l1為力FN到B 點的力矩,l2為力F 到B 點的力矩。
通過所求,電動缸所需的驅(qū)動力為30.375kN。
3 消防救援裝備安全制動機構(gòu)電動缸力仿真分析

圖3 力學示意圖Fig.3 Mechanical sketch map
將消防救援裝備安全制動機構(gòu)SolidWorks 中的三維模型導入到動力學分析軟件ADAMS 中,并對導入的三維模型的各個構(gòu)件進行重新命名與更改顏色,之后對消防救援裝備安全制動機構(gòu)添加約束,創(chuàng)建各零件之間的運動副。
本文對安全制動機構(gòu)在安全制動的過程中進行動力學仿真分析,給安全制動機構(gòu)的電動缸設置驅(qū)動力,通過電動缸帶動滑塊向下滑動進而推動楔形塊上升,仿真器安全制動的過程,并求解楔形塊接觸力,如圖4 所示。
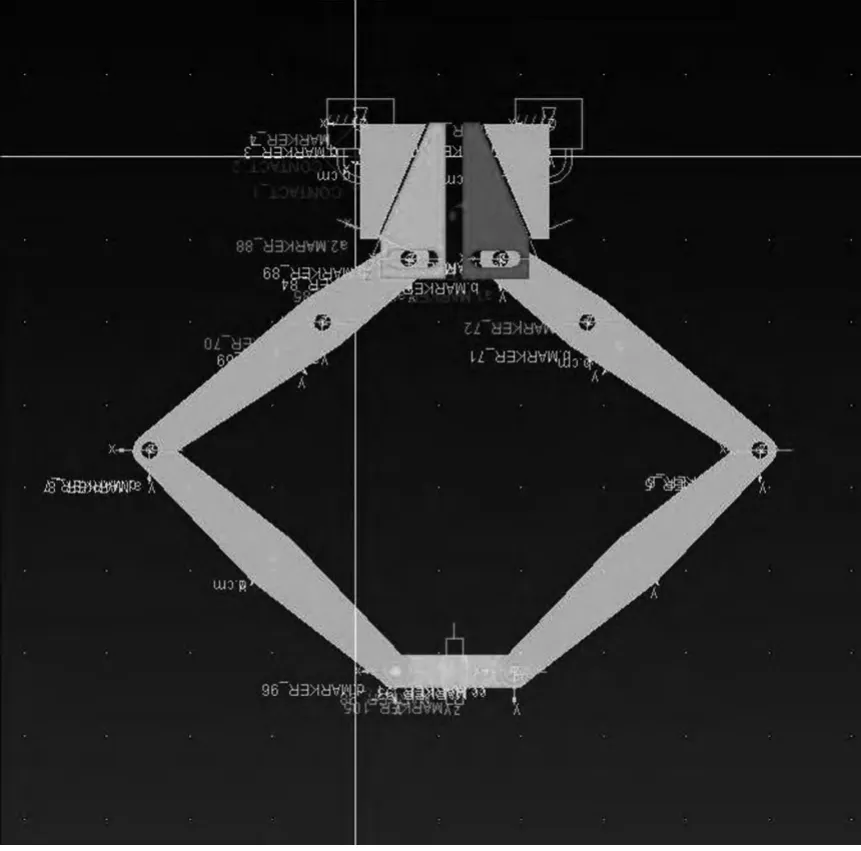
圖4 安全制動機構(gòu)ADAMS 中仿真示意圖Fig.4 Simulation schematic diagram of safety brake Mechanism
在電動缸上設置30.375kN 的力,設置運動時間為1s,電動缸帶動滑塊向下移動,最終推動楔形塊向上移動,直至吊艙停止,最后通過得出楔形塊上接觸力的仿真曲線圖,如圖5 所示。

圖5 楔形塊接觸力的仿真曲線圖Fig.5 Simulation curve of the contact force of the wedge block
通過對該安全制動機構(gòu)進行動力學仿真分析,可以得到消防救援裝備安全制動機構(gòu)楔形塊上的接觸力隨制動機構(gòu)夾緊工字鋼停止的受力變化曲線,并與機構(gòu)楔形塊上接觸力解析計算結(jié)果進行比較,仿真結(jié)果和理論計算對比如表1 所示。
如圖5 所示,隨著消防救援裝備安全制動機構(gòu)對工字鋼的夾緊,楔形塊上接觸力在一瞬間突然變大,但在接觸后由于吊艙的停止而趨于穩(wěn)定,最后達到了一個固定的值。運動仿真得到的制動機構(gòu)楔形塊上接觸力為44.6kN,而解析計算的受力為48.6kN,兩者之間差值僅為4kN,相對誤差為8.9%。
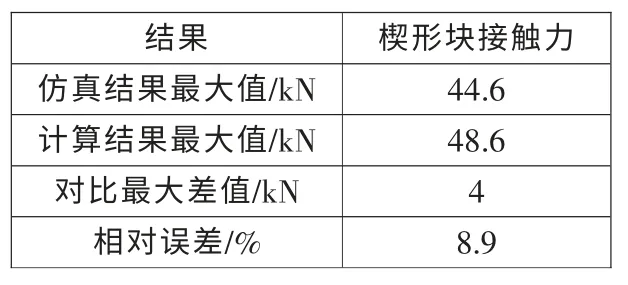
表1 仿真結(jié)果和解析計算結(jié)果對比Tab.1Comparisonofresultsbetween simulationandcalculation
4 結(jié)論
設計了一種新型安全制動機構(gòu),對其自由度、電動缸伸縮量和楔形塊上接觸力進行了計算,又對其楔形塊接觸力進行了仿真分析。仿真結(jié)果表明消防救援裝備安全制動機構(gòu)楔形塊上接觸力受力為44.6kN,楔形塊上接觸力解析計算的受力為48.6kN,通過驅(qū)動電動缸運動仿真與解析計算結(jié)果的最大受力值僅相差4kN,誤差為8.9%,誤差在允許范圍內(nèi),可以保證消防救援裝備安全制動機構(gòu)進行制動,能夠保證吊艙安全停止,所以,設計的新型安全制動機構(gòu)能夠應用到消防救援裝備中,達到設計要求,并能夠使吊艙安全制動。
[1]張繼生,姚立國,丁一. 汽車制動器速度控制仿真系統(tǒng)設計[J].吉林工程技術(shù)師范學院學報,2013,4.
[2]張耀舉,龔洪,范鵬.制動力分配優(yōu)化設計研究[J].汽車科技,2010,6.
[3]楊仁華.基于汽車制動綜合性能的鼓式制動器優(yōu)化設計[J]. 中國西部科技,2010,23.
[4]聶永芳,曹永華,朱坤.基于ADAMS 的抓取機器虛擬樣機的運動仿真[J].煤礦機械,2015,5.
[5]吳迪,崔志琴,朱國霞,等. 基于ADAMS 柴油機曲柄連桿機構(gòu)運動學分析[J].機械工程與自動化,2014,6.
[6]武建新,李華強,龐茂盛.基于MATLAB 和ADAMS 發(fā)動機曲軸系統(tǒng)動力學仿真[J].機械制造與自動化,2014,1.
[7]劉昌領(lǐng),羅曉蘭,段夢蘭.六缸壓縮機曲軸系動力學仿真和疲勞強度分析[J].機械制造與自動化,2014,1.
