車輛主動懸架的模糊PID控制仿真
2015-01-27 01:31:20景園,趙強,張娜
機電產品開發與創新 2015年6期
景 園,趙 強,張 娜
(東北林業大學 交通學院,黑龍江 哈爾濱 150040)
0 引言
不同于固定阻尼和剛度系數的車輛被動懸架,阻尼可調的主動懸架不僅能夠適應車輛載荷、行駛速度以及路面的不平程度變化達到有效減震的目的,還可以調節剛度控制懸架側傾。從結構而言,主動懸架實際是一個主動力的發生器。因此,控制策略的優劣對主動懸架控制效果有極大影響。其中利用現代控制算法中應用比較廣泛的研究有:陳志林利用了漸近穩定自適應控制[1];Yoon Y S 等利用最優控制算法得到二次型性能指標[2];孫濤在電流變液磁流變半主動懸架上試驗了模糊PID 控制[3]等等。其中PID 控制具有原理簡單、使用方便等優點應用最廣泛,而車輛主動懸架控制系統為多自由度、多參數的非線性系統,常根據經驗法不斷調試確定PID的參數。本文選用模糊PID 控制,將模糊推理運用于PID 參數的整定,以根據經驗制定控制規則得出控制決策表, 然后求出控制量的大小,不再需對控制對象精確建模,并通過Matlab/Simulink 進行了建模及仿真分析。
1 懸架模型
1/4 車輛主動懸架理想模型如圖1 所示。其模型根據牛頓定律滿足以下動力方程:
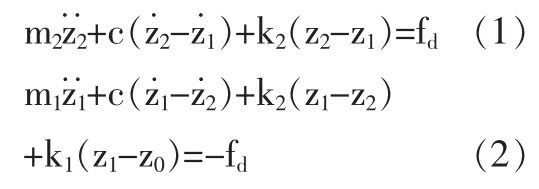

圖1 二自由度單輪動力學模型Fig.1 Single wheel dynamics model of two degrees of freedom
式中:m1—主動懸架非簧載質量(kg);m2—主動懸架簧載質量(kg);k1—輪胎徑向剛度系數(N/m);k2—懸架剛度系數(N/m);c—減振器的阻尼系數(Ns/m);z2—車身簧載質量的垂直位移(m);z1—車身非簧載質量的垂直位移(m);z0—路面激勵(m);fd—作動器的輸出力(N)。主動懸架的控制是通過控制作動器的出力fd,應用于模糊PID 控制、PID 控制及被動控制,在被動中作動器產生的fd始終為0。
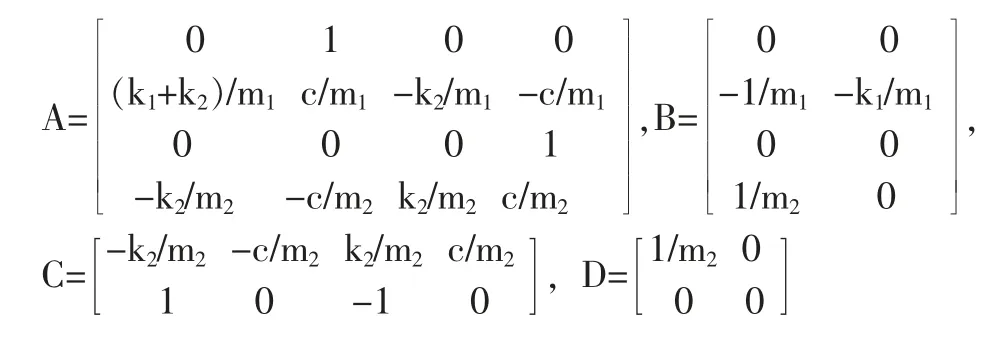
取狀態變量X=[x1,x2,x3,x4]T,其中x1=z1,x2=1,x3=z2,,取輸入向量U= [fdz0]T,取懸架加速度、懸架動撓度兩個性能指標作為輸出變量,即,系統的狀態方程可表示為:

式中:
2 參數自整定模糊PID 控制器設計
控制系統結構主要有參數可調的PID 和模糊控制系統兩部分組成,其結構如圖1 所示:模糊控制以誤差及誤差變化率為輸入,通過模糊化、模糊控制算法和模糊判決對PID 控制的三個參數kp,ki,kd 進行整定微調,得到Δkp,Δki,Δkd;PID 控制器以誤差為輸入,通過kp,ki,kd 三個參數的調節,輸出到被控系統車輛懸架,其中r(t)=0。PID 控制器的算式為[4]:

式中:kp—比例控制系數;ki—積分時間常數;kd—微分時間常數。
3 仿真分析
利用Matlab/Simulink 仿真軟件,根據本文提到的二自由度1/4 車輛懸架動力學模型,在Matlab/Simulink 仿真平臺上,搭建主動懸架系統的被動控制、PID 控制、FuzzyPID 控制仿真模型,其中FuzzyPID 控制的具體實現參見圖2。其中懸架系統的參數,如表1 所示。仿真響應曲線如圖3 所示。
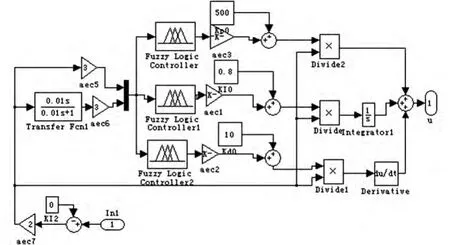
圖2 FuzzyPID 控制器模型Fig.2 FuzzyPID controller model
由圖3 可以看出:相對于主動懸架的被動控制、PID 控制,模糊PID 控制使車輛的簧載質量加速度和輪胎動載荷大幅減小了峰值,大大緩和了路面傳來的不同度激振,提高乘坐舒適性;車輛的簧載質量加速度和輪胎動載減小了均方根值,振動幅度小,改善了行駛平順性;使得車輛的懸架動撓度反而有所上升。作為評價懸架系統的三個指標,簧載質量加速度、懸架動撓度和輪胎動載荷之間存在著相互制約的動態平衡關系,模糊PID 控制并不能同時兼顧,這也是其不足之處。

表1 車輛懸架仿真參數表Tab.1Vehiclesuspensionsimulationparameters
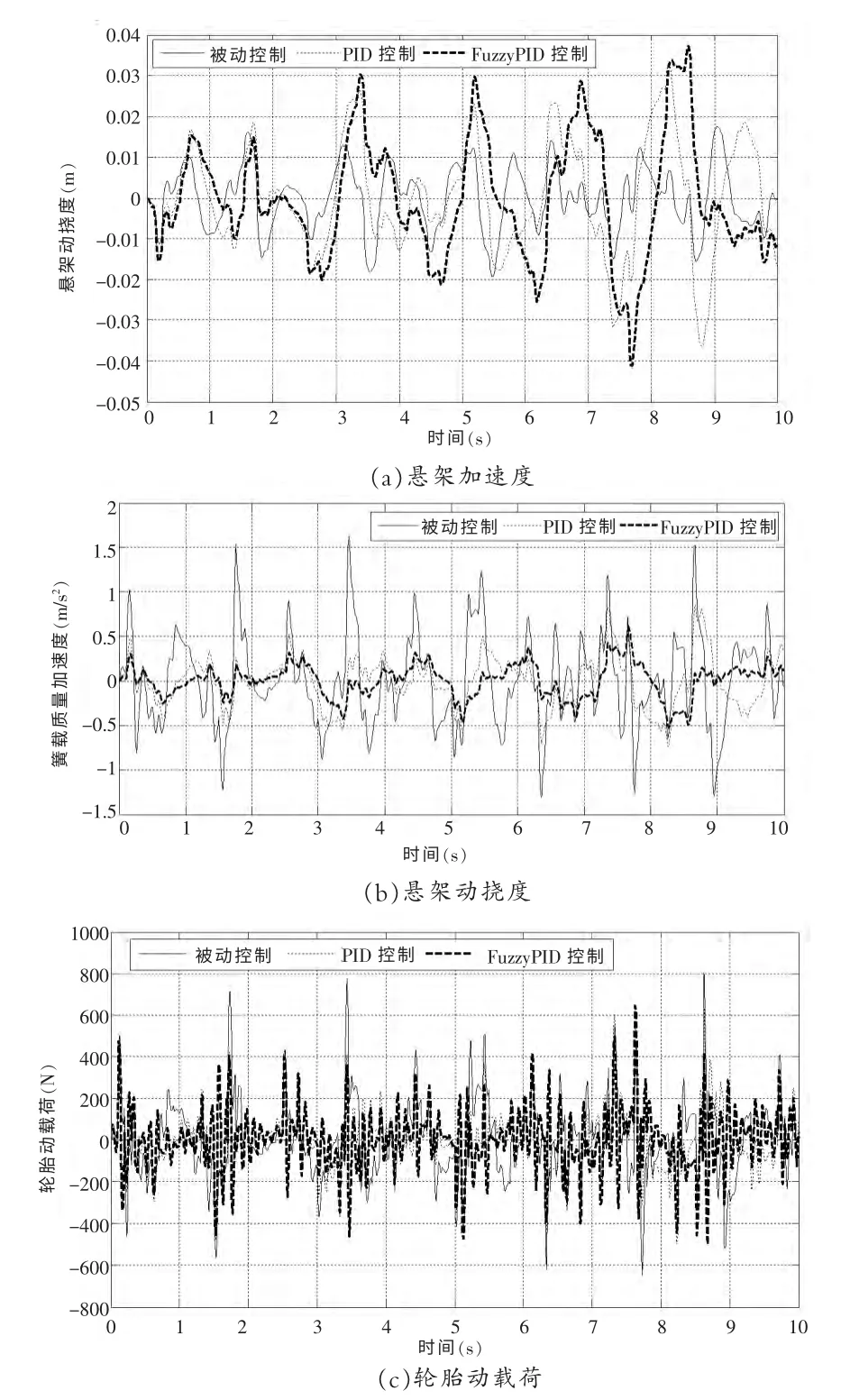
圖3 1/4 車輛懸架被動控制、PID 控制、FuzzyPID 控制仿真結果Fig.3 1/4 vehicle suspension passive control, PID control,FuzzyPID control simulation results
4 結論
本文首先以二自由度的車輛1/4 主動懸架系統為研究對象,建立其動力學模型,其次選取模糊PID 控制策略,最后運用MATLAB/Simulink 進行仿真,并通過仿真結果得出,評價懸架系統的主要性能指標車輛的簧載質量加速度、輪胎動載荷均得到明顯控制效果,能夠有效提高乘坐舒適性,改善了行駛平順性,這說明采用模糊PID 控制的主動懸架的性能優于傳統的被動懸架。
[1]陳志林,金達鋒,趙六奇. 汽車主動懸架系統的漸近穩定自適應控制[J]. 清華大學學報(自然科學版),1997,12.
[2]Yoon Y S, Kim H. Feedforward neuro-controlled active suspension using frequency and time-mixed shape performance index. Part1:control logic and performance. Int J of Vehicle Design,1996,2.
[3]孫濤,陳大躍.電流變智能半主動懸架模糊PID 控制[J].汽車工程,2004,5.
[4]蘇明,陳倫軍,林浩.模糊PID 控制及其MATLAB 仿真[J].現代機械,2004,4.
[5]丁金剛,等.基于模糊控制的車輛主動懸架.仿真研究[J]. 機電產品開發與創新,2012,1.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
