基于非合作捷變頻雷達(dá)的微弱目標(biāo)檢測算法?
2015-01-22 09:45:35
雷達(dá)科學(xué)與技術(shù) 2015年5期
關(guān)鍵詞:信號
(國防科技大學(xué)自動(dòng)目標(biāo)識別重點(diǎn)實(shí)驗(yàn)室,湖南長沙410073)
0 引言
現(xiàn)代雷達(dá)為了檢測低可觀測目標(biāo),常采用長時(shí)間積累,其積累時(shí)間達(dá)秒級或更長。在長達(dá)秒級的觀測時(shí)間里,回波的距離單元會(huì)發(fā)生明顯走動(dòng),這就在后期信號處理的過程中造成能量損失。近年來,無源雷達(dá)因不需要占用新的頻段,具有成本低和隱蔽探測等優(yōu)勢,在各國掀起了利用機(jī)會(huì)照射源的研究熱潮。但是這些研究主要集中在利用調(diào)頻廣播[1-2]、數(shù)字或模擬電視[3-4]、手機(jī)基站[5-6]、導(dǎo)航衛(wèi)星[7]和 WiFi信號[8]等外輻射源。隨著現(xiàn)代電子技術(shù)的不斷發(fā)展,電磁對抗領(lǐng)域的干擾和反干擾的手段也在交替更新進(jìn)步,捷變頻技術(shù)由于能夠提高雷達(dá)的抗干擾能力和目標(biāo)檢測能力已經(jīng)被廣泛應(yīng)用到雷達(dá)系統(tǒng)的設(shè)計(jì)之中。研究利用捷變頻雷達(dá)作為外輻射源能夠擴(kuò)展非合作雷達(dá)能夠利用的外輻射源類型,但同時(shí)在信號處理和微弱目標(biāo)檢測方面也面臨一些困難。由于捷變頻雷達(dá)脈沖之間的相位去相參特性,因而常規(guī)MTD[9]、Keystone[10]等相參積累方法很難適用。為了克服這些困難,一些學(xué)者提出了非相參積累的方法,如Carlson[11]等學(xué)者把圖像處理技術(shù)引入雷達(dá)信號檢測領(lǐng)域,提出了基于Hough變換的算法,但該類算法比較復(fù)雜,實(shí)時(shí)性差,而且由于是非相參積累,積累的效率不如相參積累。
針對捷變頻雷達(dá)運(yùn)動(dòng)目標(biāo)回波的相位去相參特性和長時(shí)間積累時(shí)的距離走動(dòng)問題,本文基于非合作雷達(dá)的應(yīng)用背景,提出了一種基于頻率捷變的相參積累算法用于微弱目標(biāo)檢測。該算法首先用Keystone變換算法校正距離單元走動(dòng),然后對捷變的頻點(diǎn)進(jìn)行處理來消除回波信號的相位抖動(dòng)從而實(shí)現(xiàn)相參積累,最后仿真實(shí)驗(yàn)證明該算法對微弱目標(biāo)檢測的有效性。
1 非合作雷達(dá)系統(tǒng)工作模式
本文以一個(gè)典型的非合作雙基地雷達(dá)系統(tǒng)為例,其工作示意圖如圖1所示。外輻射源選擇捷變頻相控陣空中監(jiān)視雷達(dá),目標(biāo)為空中飛機(jī),接收機(jī)設(shè)置有兩個(gè)通道,參考通道和回波通道。參考通道通過輻射源方向圖旁瓣接收直達(dá)波,用于回波通道信號的時(shí)間同步、頻率同步。回波接收天線能同時(shí)多波束覆蓋觀測空域,實(shí)現(xiàn)空間同步。通過對回波通道內(nèi)接收到的目標(biāo)散射回波作信號處理獲得目標(biāo)參數(shù)信息,從而實(shí)現(xiàn)對目標(biāo)的檢測、跟蹤和成像。
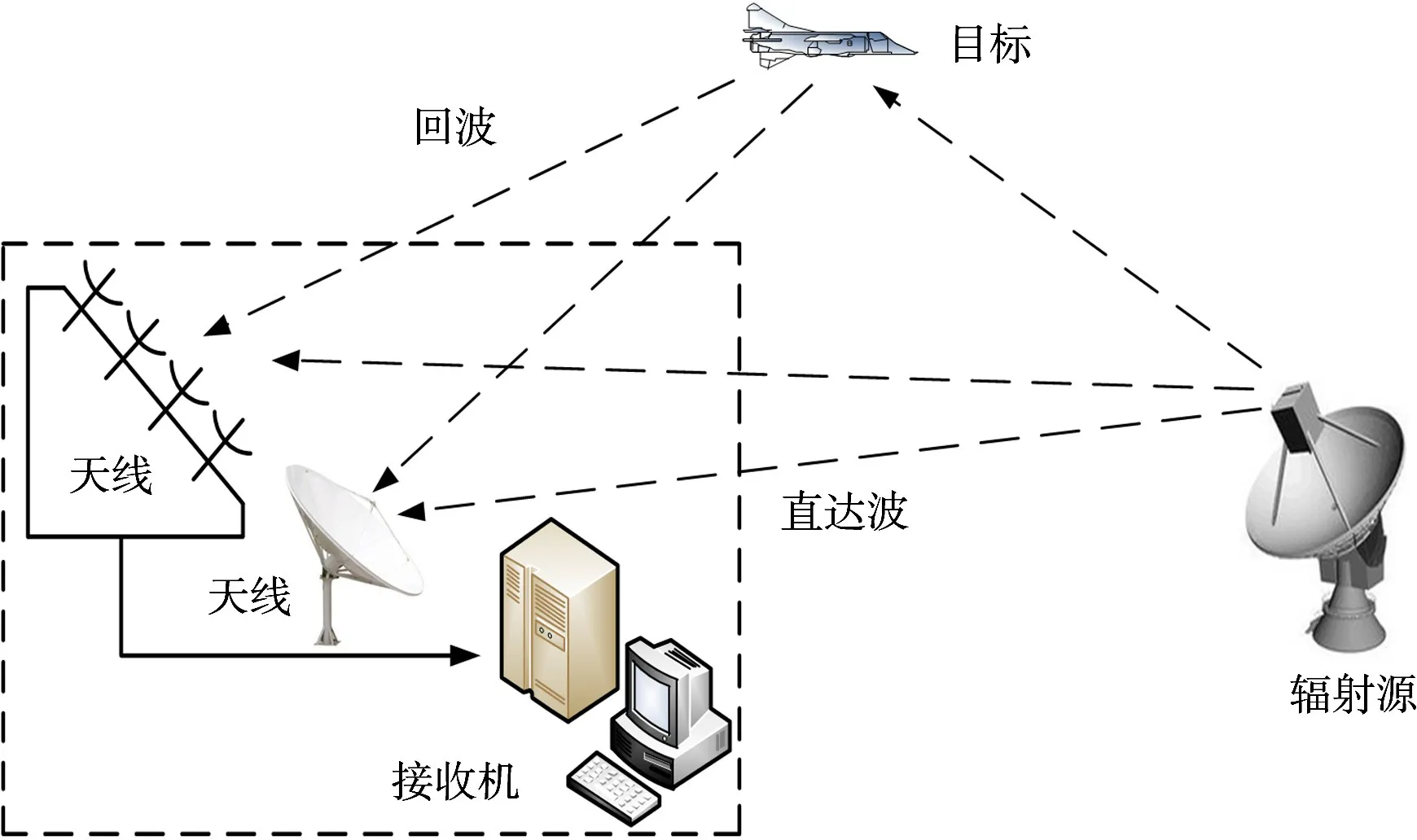
圖1 非合作雙基地雷達(dá)系統(tǒng)工作示意圖
輻射源頻率捷變雷達(dá)是一種發(fā)射信號的頻率以規(guī)則或不規(guī)則自適應(yīng)的方式作脈間變頻和脈組變頻的雷達(dá),在不同的工作模式下信號的頻點(diǎn)呈現(xiàn)隨機(jī)性或偽隨機(jī)性。作為非合作雷達(dá),為了能對微弱的回波信號能量進(jìn)行有效積累,首先空間上的同步需要采用同時(shí)多波束技術(shù)覆蓋觀測區(qū)域,然后處理參考通道內(nèi)的直達(dá)波信息,對提取的脈沖樣式,脈寬、帶寬、載頻以及脈沖組合形式等作統(tǒng)計(jì)分析,以推測估計(jì)外輻射源的工作方式、資源分配情況,最后獲得的外輻射源系統(tǒng)參數(shù)用于回波通道內(nèi)信號時(shí)頻同步[12-13]。本文研究了其中一種工作模式下的脈沖樣式,該脈沖樣式在一個(gè)積累時(shí)間內(nèi)載頻圍繞某一中心頻點(diǎn)呈隨機(jī)性跳變規(guī)律,如圖2所示。

圖2 某種工作模式下的捷變頻示意圖
2 基本原理
2.1 捷變頻信號模型
為了提高距離分辨率,雷達(dá)系統(tǒng)通常采用的基帶波形為線性調(diào)頻(LFM)信號,信號表達(dá)式為

式中,Tp為脈沖寬度,K=B/Tp為調(diào)頻斜率,B為信號帶寬。經(jīng)過捷變頻雷達(dá)載頻調(diào)制之后發(fā)射信號的波形為


式中,τm為目標(biāo)回波的時(shí)延,Ar為接收到的回波幅度。經(jīng)過接收機(jī)解調(diào)之后的基帶回波為

脈沖壓縮是通過匹配濾波完成的。通過對參考通道里的直達(dá)波數(shù)據(jù)進(jìn)行提取得到輻射源基帶發(fā)射信號參數(shù),濾波器響應(yīng)即為基帶發(fā)射信號的反轉(zhuǎn)共軛:

將目標(biāo)回波進(jìn)行脈沖壓縮得到回波信號為

在雙基地雷達(dá)系統(tǒng)[14]中,據(jù)目標(biāo)運(yùn)動(dòng)的幾何關(guān)系和運(yùn)動(dòng)學(xué)狀況構(gòu)造了雙基地空間坐標(biāo)系,如圖3所示。其中,V為目標(biāo)速度,δ為視線角度,β為目標(biāo)的雙基地角度。目標(biāo)的雙基地距離R=RT+RR,其中RT是目標(biāo)到發(fā)射站的距離,RR是目標(biāo)到接收站的距離,再利用基線距離L,發(fā)射站和接收站的目標(biāo)方位角θT,θR就可以定位目標(biāo)。
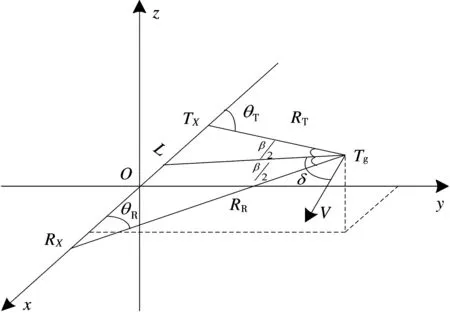
圖3 非合作雙基地雷達(dá)參數(shù)示意圖
根據(jù)雙基地雷達(dá)系統(tǒng)中多普勒的定義可知目標(biāo)多普勒為

目標(biāo)的雙基地距離為
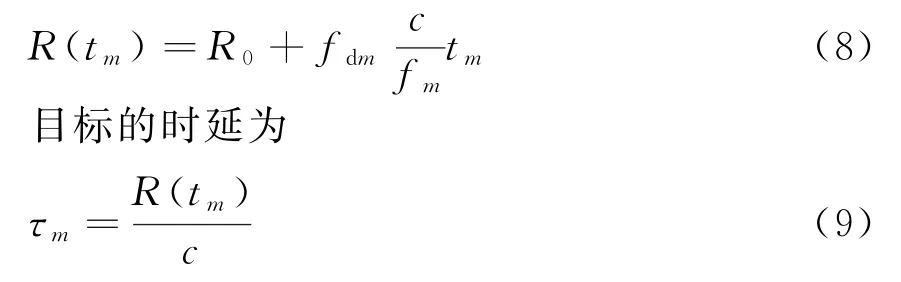
R0是零時(shí)刻目標(biāo)相對雙基地雷達(dá)初始距離,將式(7)、(8)、(9)代入式(6)中得到脈沖壓縮后的信號為
從式(10)可以看出,當(dāng)發(fā)射的脈沖不同時(shí),回波的時(shí)延不同,則脈壓之后信號的峰值在相對距離軸上的位置不同,即發(fā)生了距離單元走動(dòng),而頻率捷變對目標(biāo)信號的相位產(chǎn)生不同程度的調(diào)制,以上因素導(dǎo)致了回波信號積累時(shí)能量分散,不利于信噪比的提高。
2.2 距離走動(dòng)校正
Keystone變換是一種應(yīng)用于合成孔徑雷達(dá)領(lǐng)域的常見距離走動(dòng)校正技術(shù),本文使用Keystone變換補(bǔ)償目標(biāo)信號長時(shí)間積累時(shí)造成的距離單元走動(dòng)。首先對式(10)作快時(shí)間域的傅里葉變換得到式(11)。
然后通過設(shè)定虛擬時(shí)間解決距離走動(dòng)問題,

再對上式作快時(shí)間域逆傅里葉變換得到時(shí)域信號:
由式(13)可見目標(biāo)包絡(luò)中心變成了常數(shù)項(xiàng),即Keystone變換后回波集中在同一個(gè)距離單元內(nèi),距離走動(dòng)得到補(bǔ)償。
2.3 相位校正
從式(13)中可以看出,Keystone變換后回波信號的距離單元走動(dòng)得到有效校正,那么為了實(shí)現(xiàn)同一距離單元內(nèi)回波信號的同相累加,必須通過消除回波信號的相位抖動(dòng)來完成。f m是目標(biāo)的第m條脈沖的載頻,其在相鄰脈沖之間存在頻點(diǎn)跳躍。載頻跳變的規(guī)律可用式(14)描述:

式中,f0為載頻中心頻率,a(m)為頻率捷變的規(guī)律,一般為隨機(jī)序列。根據(jù)圖3中雙基地目標(biāo)運(yùn)動(dòng)模型中的角度關(guān)系推導(dǎo)出目標(biāo)引起的多普勒頻率為
回波載頻可以從參考通道內(nèi)的直達(dá)波中估計(jì)得到,所以脈沖壓縮后回波信號的相位抖動(dòng)可以通過乘以對應(yīng)的相位差來消除,最后得到回波信號為

由式(16)可見目標(biāo)包絡(luò)中心變成常數(shù)項(xiàng),而且回波的頻點(diǎn)穩(wěn)定,相位不再出現(xiàn)抖動(dòng),這時(shí)回波信號可以實(shí)現(xiàn)同一個(gè)距離單元內(nèi)的同相累加。
2.4 算法處理流程
基于非合作捷變頻雷達(dá)系統(tǒng)的工作模式、目標(biāo)回波模型以及目標(biāo)運(yùn)動(dòng)模型,設(shè)計(jì)了如圖4所示的微弱目標(biāo)檢測算法流程圖。首先,參考通道內(nèi)處理接收到的直達(dá)波,用來提取信號的載頻、帶寬、脈寬等參數(shù),回波通道利用參考通道獲得的直達(dá)波參數(shù)進(jìn)行時(shí)間和頻率同步,緩存回波數(shù)據(jù)矩陣。然后,緩存的回波數(shù)據(jù)經(jīng)匹配濾波后進(jìn)行Keystone變換校正距離單元走動(dòng),對同步的載頻頻點(diǎn)處理消除相位抖動(dòng)項(xiàng)實(shí)現(xiàn)相位校正,最后實(shí)現(xiàn)同一距離單元內(nèi)回波脈沖的相參積累。
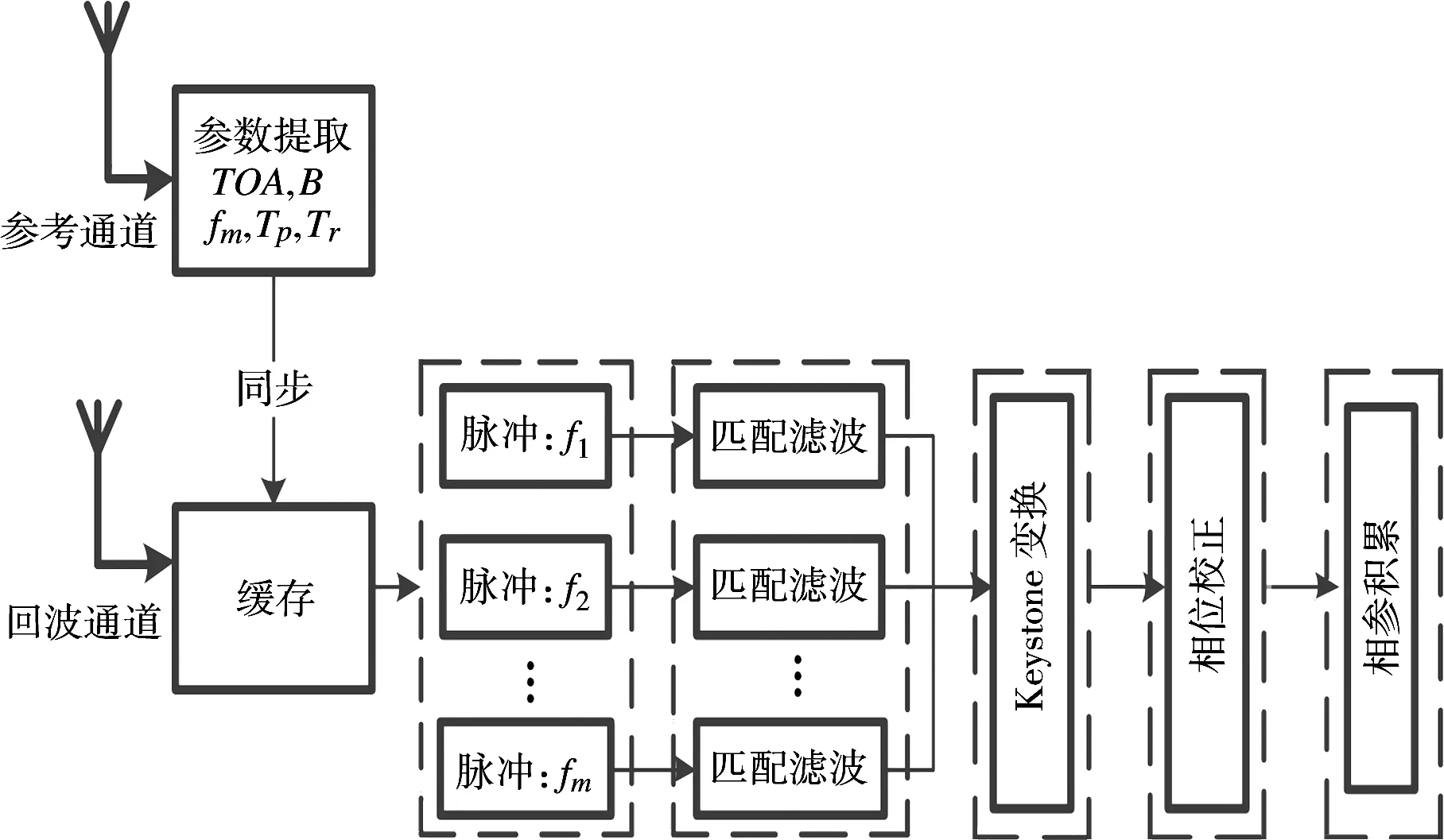
圖4 非合作雙基地雷達(dá)微弱目標(biāo)算法流程
3 仿真實(shí)驗(yàn)及性能分析
3.1 仿真實(shí)驗(yàn)
為了驗(yàn)證本文算法的有效性,采用Monte Carlo仿真實(shí)驗(yàn)進(jìn)行分析。非合作雷達(dá)系統(tǒng)參數(shù)設(shè)置如表1所示。
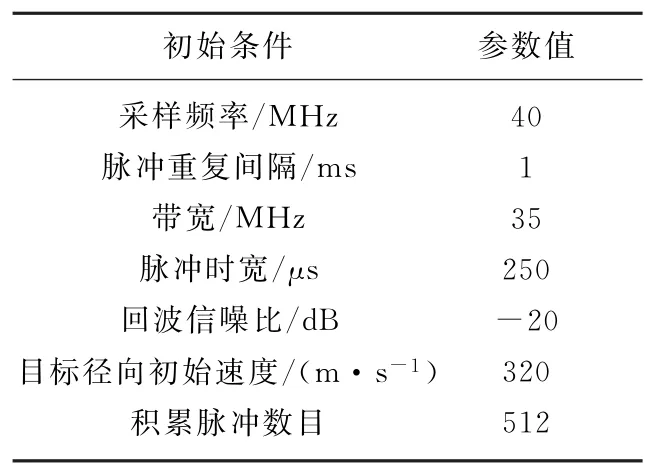
表1 系統(tǒng)參數(shù)設(shè)置
按照圖4給出的算法流程進(jìn)行仿真,當(dāng)信噪比為-20 d B,設(shè)置載頻頻點(diǎn)在中心為55 MHz處跳變,Δf m在[-5 MHz,5 MHz]范圍內(nèi)隨機(jī)變化,本文提出算法的仿真實(shí)驗(yàn)結(jié)果如圖5所示。
圖5(a)中所示當(dāng)對512條回波進(jìn)行脈沖壓縮后距離單元走動(dòng)明顯,第512條脈沖跨越約38個(gè)距離單元;圖5(b)中所示Keystone變換后的回波脈沖距離單元走動(dòng)得到校正明顯;圖5(c)中所示當(dāng)回波信號的相位擾動(dòng)項(xiàng)消除后同一距離單元的回波同相累加,能量得到有效積累。仿真驗(yàn)證了本文提出的算法能夠很好地應(yīng)用在捷變頻雷達(dá)的微弱目標(biāo)檢測上。
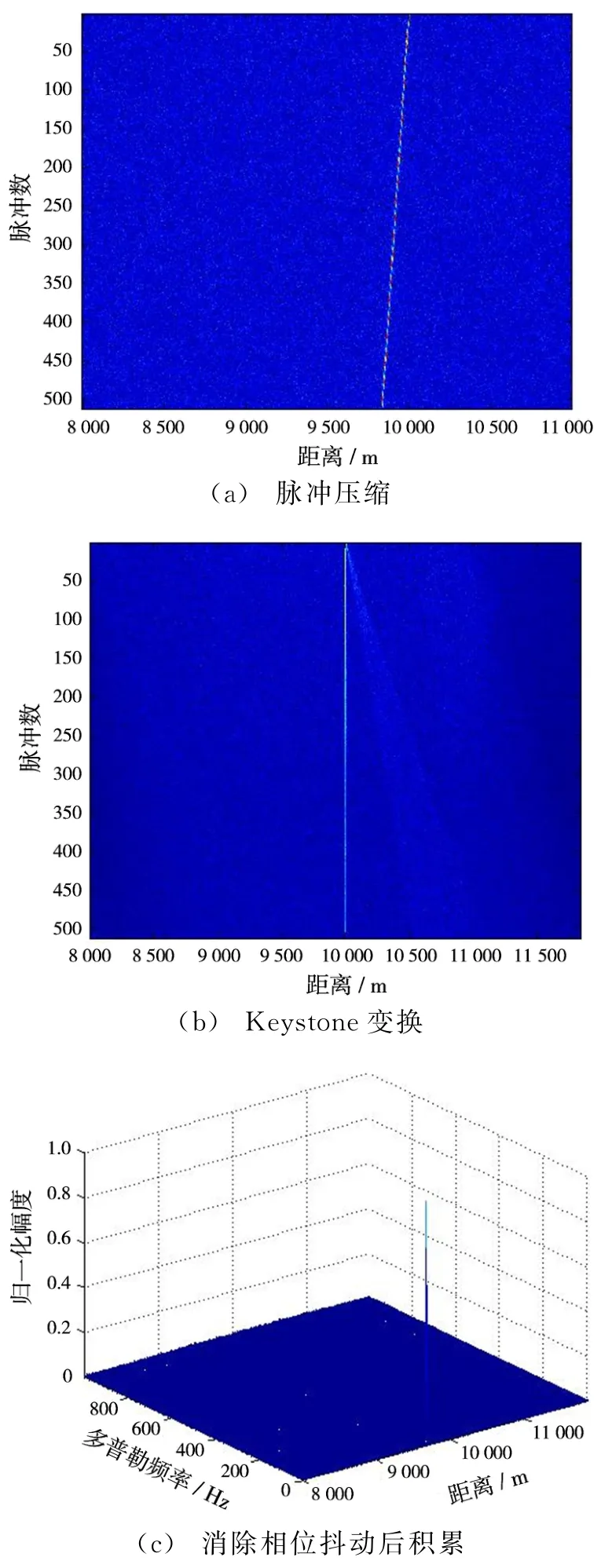
圖5 基于本文算法的仿真結(jié)果
3.2 算法性能分析
3.2.1 脈沖數(shù)和頻率測不準(zhǔn)對本文算法的影響
為了研究脈沖數(shù)變化和頻率同步出現(xiàn)偏差時(shí)對本文算法性能的影響,改變表1系統(tǒng)參數(shù)中的積累脈沖數(shù)得到回波脈沖的積累增益曲線,如圖6所示。脈沖載頻在中心頻率55 MHz隨機(jī)跳變,當(dāng)頻率同步時(shí)出現(xiàn)±0.5 MHz的偏差時(shí)回波脈沖積累效果如圖7所示。
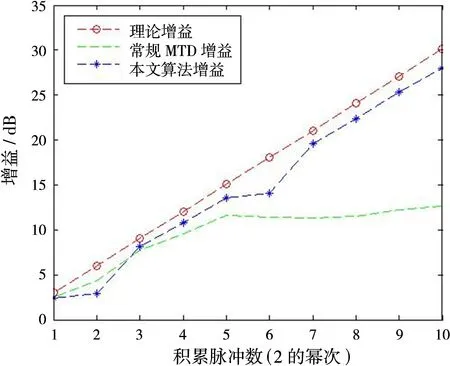
圖6 脈沖數(shù)對積累增益的影響

圖7 測不準(zhǔn)時(shí)對積累效果的影響
從圖6可以看出,當(dāng)積累脈沖數(shù)目增加時(shí),本文算法能夠很好地吻合理論增益,而當(dāng)脈沖數(shù)超過32條時(shí),常規(guī)MTD算法對脈沖的積累增益幅度較小。這是因?yàn)殡S著脈沖數(shù)目的增加,回波的距離單元走動(dòng)越來越明顯,而且回波脈沖的頻點(diǎn)捷變導(dǎo)致脈沖的相位抖動(dòng)劇烈,因此積累能量損失較大。當(dāng)同步到的脈沖載頻出現(xiàn)偏差時(shí),即使Keystone變換后距離單元走動(dòng)得到校正,但是捷變頻帶來的相位抖動(dòng)項(xiàng)沒有消除,回波脈沖仍然無法實(shí)現(xiàn)同相積累,即出現(xiàn)如圖7所示的積累能量分散現(xiàn)象。
3.2.2 本文算法與非相參積累方法比較
為了對比本文算法和非相參積累算法的性能,本文選擇基于Hough變換的非相參積累算法。該算法是利用檢測前跟蹤的思想,用目標(biāo)運(yùn)動(dòng)的直線特征來補(bǔ)償目標(biāo)的距離走動(dòng)效應(yīng),從而提高信噪比實(shí)現(xiàn)微弱目標(biāo)檢測。設(shè)置如表1所示的雷達(dá)系統(tǒng)參數(shù),兩種算法的Monte Carlo仿真結(jié)果如圖8所示。
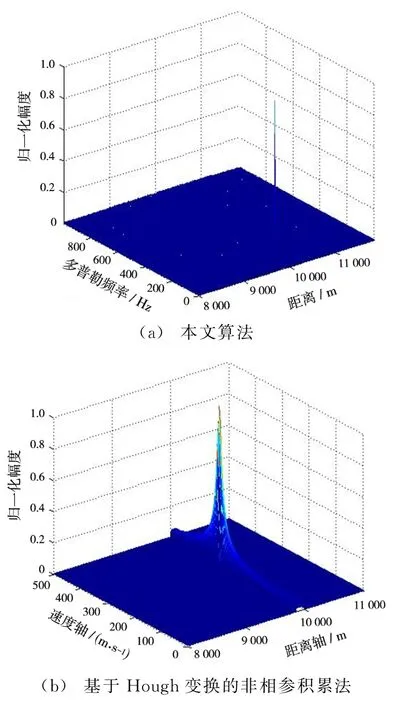
圖8 本文算法與非相參積累算法
從仿真結(jié)果可以看出,基于Hough變換的算法和本文提出的算法在處理頻率捷變的回波信號積累時(shí)能量都能表現(xiàn)出很好的凝聚性,但是仿真實(shí)驗(yàn)表明基于Hough變換的非相參算法參數(shù)搜索空間較大,實(shí)時(shí)性差,不利于工程實(shí)現(xiàn)。
4 結(jié)束語
本文分析了捷變頻雷達(dá)的回波信號模型,提出了一種基于捷變頻雷達(dá)的微弱目標(biāo)檢測算法。該方法能夠解決當(dāng)捷變頻回波信號長時(shí)間相參積累時(shí)距離單元得到校正后相位仍然存在抖動(dòng)的問題。仿真實(shí)驗(yàn)表明,該方法能夠提高信噪比增益,有效地檢測微弱目標(biāo)。但由于捷變頻雷達(dá)工作頻點(diǎn)具有隨機(jī)性或偽隨機(jī)性,系統(tǒng)同步上難度較大,因此如何精確估計(jì)外輻射源系統(tǒng)參數(shù),并開展相應(yīng)的實(shí)時(shí)算法研究是下一步的工作重點(diǎn)。
[1]HOWLAND P,MAKSIMIUK D,REITSMA G. FM Radio Based Bistatic Radar[J].IEE Proceedings -Radar,Sonar and Navigation,2005,152(3):107-115.
[2]BROWN J,WOODBRIDGE K,GRIFFITHS H,et al.Passive Bistatic Radar Experiments from an Airborne Platform[J].IEEE Aerospace and Electronic Systems Magazine,2012,27(11):51-55.
[3]PALMER J E,HARMS H A,SEARLE S J,et al. DVB-T Passive Radar Signal Processing[J].IEEE Trans on Signal Processing,2013,61(8):2116-2126.
[4]GRIFFITHS H D,LONG N R W.Television-Based Bistatic Radar[J].IEE Proceedings,Part F:Communications,Radar and Signal Processing,1986,133 (7):649-657.
[5]KRYSIK P,SAMCZYNSKI P,MALANOWSKI M, et al.Detection of Fast Maneuvering Air Targets Using GSM Based Passive Radar[C]∥19th International Radar Symposium,Warsaw,Poland:IEEE, 2012:69-72.
[6]ZEMMARI R,NICKEL U,WIRTH W.GSM Passive Radar for Medium Range Surveillance[C]∥Proceedings of the 6th European Radar Conference, Rome,Italy:Eu MA,2009:49-52.
[7]XU D,LV D,SHEN F,et al.A Weak Target Detection Method for GPS Based Passive Radar[C]∥3rd International Conference on Advanced Computer Control,Harbin:IEEE,2011:278-281.
[8]COLONE F,FALCONE P,BONGIOANNI C,et al. WiFi-Based Passive Bistatic Radar:Data Processing Schemes and Experimental Results[J].IEEE Trans on Aerospace and Electronic Systems,2012,48(2): 1061-1079.
[9]SKOLNIK M.Introduction to Radar System[M].3rd ed.Columbus,OH:McGraw-Hill,2002.
[10]PERRY R,DIPIETRO R,FANTE R.Coherent Integration with Range Migration Using Keystone Formatting[C]∥IEEE Radar Conference,Boston,MA, USA:IEEE,2007:863-868.
[11]CARLSON B D,EVANS E D,WILSON S L.Search Radar Detection and Tracking with the Hough Transform.I.System Concept[J].IEEE Trans on Aerospace and Electronic Systems,1994,30(1):102-108.
[12]索毅毅,鮑慶龍,王亞森,等.基于捷變頻非合作雷達(dá)輻射源的無源雷達(dá)時(shí)頻同步方法[J].雷達(dá)科學(xué)與技術(shù),2014,12(5):510-516. SUO Yi-yi,BAO Qing-long,WANG Ya-sen,et al. Time and Frequency Synchronization for Passive Radar Based on Frequency Agile Non-Cooperative Radar Illuminator[J].Radar Science and Technology, 2014,12(5):510-516.(in Chinese)
[13]沈銳超,鮑慶龍,周成家,等.一種非合作雙基地雷達(dá)空間同步定位精度[J].雷達(dá)科學(xué)與技術(shù),2011,9 (5):393-396. SHEN Rui-chao,BAO Qing-long,ZHOU Chengjia,et al.Location Accuracy of Non-Cooperative Bistatic Radar Based on Spatial Synchronization[J]. Radar Science and Technology,2011,9(5):393-396. (in Chinese)
[14]楊振起,張永順,駱永軍.雙(多)基地雷達(dá)系統(tǒng)[M].北京:國防工業(yè)出版社,1998.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06