面向地鐵車輛牽引電機的車載變流系統設計
2015-01-17 05:46:34方曉王丹申天亮馬東輝
電子設計工程 2015年1期
關鍵詞:控制策略
方曉,王丹,申天亮,馬東輝
(廣州地下鐵道總公司 廣東 廣州 510310)
近年來,隨著我國經濟的不斷發展,城市化步伐進一步加快。未來幾年內,國家將投資1300多億發展城市地鐵、輕軌,以改善高速城市化帶來的交通擁堵和環境問題。項目涉及北京、上海、廣州等十幾個城市。然而,城市軌道交通的關鍵技術部件—牽引變流器卻一直依賴國外進口[1]。因此,研究設計面向地鐵車輛牽引電機的車載變流系統,努力實現其國產化具有很高的經濟價值和現實意義。本文首先針對牽引變流器系統結構、主電路及控制系統完成相應設計,并介紹相關器件的選型方法;其次,采用間接矢量控制策略完成地鐵車輛異步電機控制;最后,通過模型仿真和實驗證明該設計方案可行可靠。
1 牽引變流器結構設計
圖1所示為牽引變流器結構示意圖,其由3部分組成:主電路、驅動電路和控制電路。其中主電路為直流電能轉換成交流電能的主體和載體,驅動電路主要進行控制信號的功率放大,并提供IGBT貫穿短路和過流時的保護功能。而控制電路則作為異步電機控制策略數字實現的平臺,為主電路提供逆變控制信號。
2 主電路設計
2.1 主電路結構設計

圖1 變流器結構圖Fig.1 Converter structure chart
牽引變流器主電路部分采用三相電壓型逆變電路結構,其由預充電回路、中間直流濾波器、逆變電路和放電回路四部分組成,如圖2所示。

圖2 牽引變流器主電路Fig.2 Main circuit of traction inverter
預充電回路主要由主接觸器KM1,預充電電阻R1和預充電開關器件Q1組成[2]。在系統啟動瞬間閉合預充電開關器件,對電容充電。電容充電飽和后斷開預充電開關器件,再閉合主接觸器進行切換,從而減小對支撐電容的電壓沖擊[3]。
中間直流濾波器包含濾波電感L和支撐電容C。其中支撐電容的主要作用是濾除變流器輸入端的紋波電壓,緩沖能量,保持直流側電壓穩定,而濾波電感則主要用于抑制直流側電流突變[4]。為有效減小直流電壓的脈動、穩定電壓、提供無功功率,支撐電容值應盡量大。但支撐電容值過大又會影響電壓環控制的跟隨性能。綜合考慮各項性能指標,下文將詳細論述支撐電容、濾波電感的選型方法。
假設牽引變流器額定容量為210 KVA,額定電壓1 500 V,功率因數0.85,其網側直流電壓值為1 000~1 800 V。而直流電壓跟隨性能的優劣則通過網側直流電壓由穩定最低值1 000 V躍變到額定值1 500 V的動態過程來評價。當網側電壓從1 000 V躍變到1 500 V時,將以最大電流Idm給負載和電容充電,其動態響應過程等效電路如圖3所示[5]。為便于計算,把電機負載等效為電阻負載,相應折算公式如下:
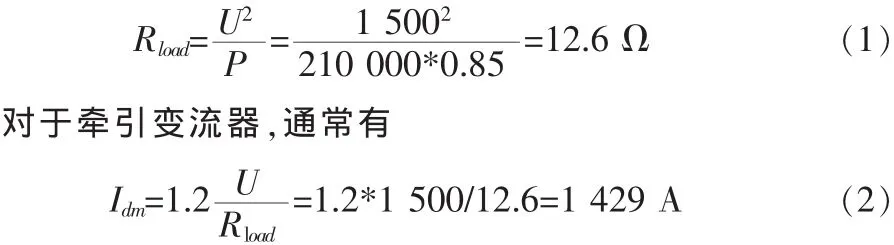

圖3 網側電壓躍變動態等效電路圖Fig.3 The dynamic equivalent circuit diagram of the grid voltage jump
根據RC一階動態響應方程可得

網側電壓從1 000 V升到1 500 V的上升時間不大于0.15 s,則需滿足

將式(1)、式(2)代入式(4)可得

考慮到電容實際體積和成本的大小,可選擇2個額定電壓為1 800 V,容量為4.2 mF的電容并聯。
電感主要用于抑制電容充電時的沖擊電流,同時根據直流側諧波抑制的要求(地鐵牽引傳動系統直流側濾波器諧振頻率一般在20 Hz左右),可選擇額定電流80 A的空心電感且L=5.2 mH,(具有5倍過載能力)。
逆變電路是整個牽引變流器的核心,主要包含3個IGBT橋臂,且每一個IGBT上都并聯有吸收電容,通過受電弓取電,完成將1 500 V的直流電逆變成可變頻變壓的交流電。IGBT的選型主要考慮額定電壓、額定電流及散熱效果。本文給出選型參考公式如下:

其中Uin為受電弓網壓1 500 V;K1為電網電壓波動系數,一般取1.15;K2為中間直流回路有反饋時的泵升電壓系數,一般取 1.2;K3為必要的電壓安全系數,一般取 1.3~1.5[6]。代入式,得

直流側的額定電壓為1 500 V,假設輸出電壓有效值為1 050 V,在額定功率210 KVA工作時,其輸出電流的大小為:

考慮過載系數為1.5,紋波系數為1.2,則流過IGBT的最大電流如下式表示:

根據以上計算所得的選型電壓和電流,對應牽引變流器應采用耐壓等級為3 300 V,額定電流為400 A的IGBT。
放電回路主要包含放電開關管Q2和放電電阻R2。在牽引變流器停止工作的時候閉合放電開關管Q2,在電容電壓降低到安全范圍內時再斷開開關管,既可以提高變流器的安全可靠性,又可以節省調試時的等待時間,提高效率。
2.2 控制系統設計
本文設計的地鐵牽引傳動控制系統采用DSP+FPGA的基本構架。其中DSP采用TI公司的TMS320F28335用以完成異步電機控制算法、數據采集/轉換、CAN通信、485通信及以太網通信;而FPGA則采用ALTERA公司的Cyclone EP1C12Q24017,作為并行處理芯片其在完成PWM脈沖發生功能的同時,當接收到有關保護的異常反饋信號時,還可以迅速封鎖脈沖,進行硬件保護。
3 控制策略
牽引電機控制技術是牽引傳動控制系統的核心技術,本文采用間接矢量控制策略,利用電機定子電流勵磁分量、轉矩分量雙閉環,經過電流控制器實現定子電壓幅值給定。且無須磁鏈觀測器,定子電流勵磁分量給定值直接通過磁鏈給定值獲得,同時,轉矩給定值結合勵磁電流給定值計算出轉差頻率,既而與電機反饋頻率相加得到電機同步頻率給定值,經過積分獲得解耦角θ,最終實現解耦控制。在同步旋轉坐標系下,異步電機動態等效電路如圖4所示。
根據電機動態模型可以得出轉子回路方程

轉子磁鏈可表示為

由于式(10)中的轉子電流是不可測的,因此,借助于式(11),消去其轉子電流,可得到如下表達式
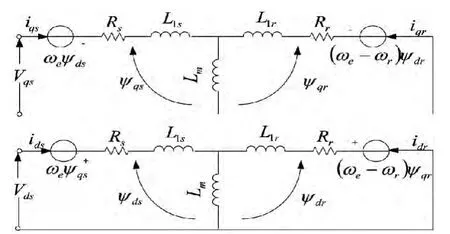
圖4 同步旋轉坐標系下的電機動態等效電路Fig.4 Dynamic equivalent circuit of motor synchronous rotating coordinate system

其中

為使轉子的合成磁鏈定向在de軸上,需要

將式(14)和式(16)代入式(12)中,可得

代入式(17)可得

即穩態時轉子磁鏈與電流ids成正比[7]。
本文間接矢量控制策略原理框圖如圖5所示。這種方法不但具有基于穩態模型轉差頻率控制系統的優點,而且通過矢量控制克服了其不足之處。與直接矢量控制方法相比,結構簡單,且無需進行磁鏈觀測,與常規的轉差控制方法一樣,根據反饋角頻率,加上由給定轉矩推算出的轉差角頻率,得到控制定子電流的瞬時角頻率,再通過積分器得到定子輸入電壓矢量的相位角θ。從而使異步電機的電流和轉矩迅速由原先的工作狀態變換到新的工作狀態[8]。
根據給定電磁轉矩T*e,結合定子電流勵磁分量給定值可以得到轉矩分量。


圖5 帶開環磁鏈控制的間接矢量控制框圖Fig.5 Indirect vector control block diagram with open loop of flux control
式中P為電機極數。由于轉子磁鏈受反饋速度信號的控制,因此,可直接通過查詢轉子磁鏈曲線獲得磁鏈給定值。當反饋電機轉速小于電機額定轉速時,磁鏈給定值恒為額定磁鏈;當電機運行轉速大于電機額定轉速時,則進入弱磁階段即磁鏈給定值與反饋轉速成1次反比逐漸減小。定子電流轉矩分量和勵磁分量給定值分別與實際測量值求差后進入PI調節器,從而得到定子電壓給定值。結合電壓矢量的相位角θ,最終給出當前控制周期內的PWM脈沖驅動信號。
4 模型仿真
在matlab中搭建系統仿真模型,輸入直流側電壓為1 500 V,開關頻率為1 k。
圖6為穩定時異步電機定子電壓與三相電流的仿真波形,由圖可見三相電流波形正弦度良好。

圖6 穩態時仿真波形Fig.6 Steady-state simulation waveform
圖7 則為動態過程中,定子電流勵磁分量/轉矩分量給定值與反饋值的對比仿真波形,分析可知其動態響應較快,超調量較小,既而證明了控制策略的合理性。
5 實驗驗證
根據上文構建的變流系統,搭建實驗平臺,其中支撐電容選擇2個額定電壓為1 800 V,容量為4.2 mF的電容并聯。電感為5.2 mH。直流側輸人的電壓為1 500 V。IGBT開關頻率為1 kHz。所選異步電機額定電壓1 050 V,頻率為60 Hz。圖9依次給出了牽引電機電流、牽引電機轉速、轉子磁鏈q軸分量、定子電流轉矩分量給定值波形,由圖可見,牽引電機在各種運行工況下,轉子磁鏈q軸分量基本為0,牽引電機電流跟隨給定轉矩電流變化,系統運行穩定,且牽引電機起動平滑,轉矩動態響應快。
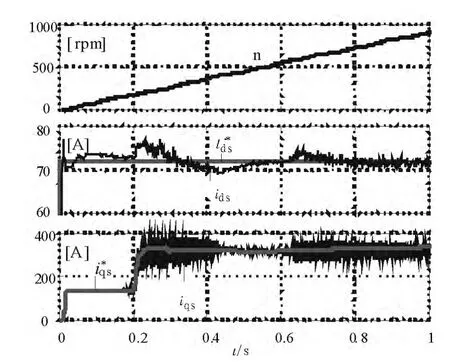
圖7 動態時仿真波形Fig.7 Dynamic simulation waveform
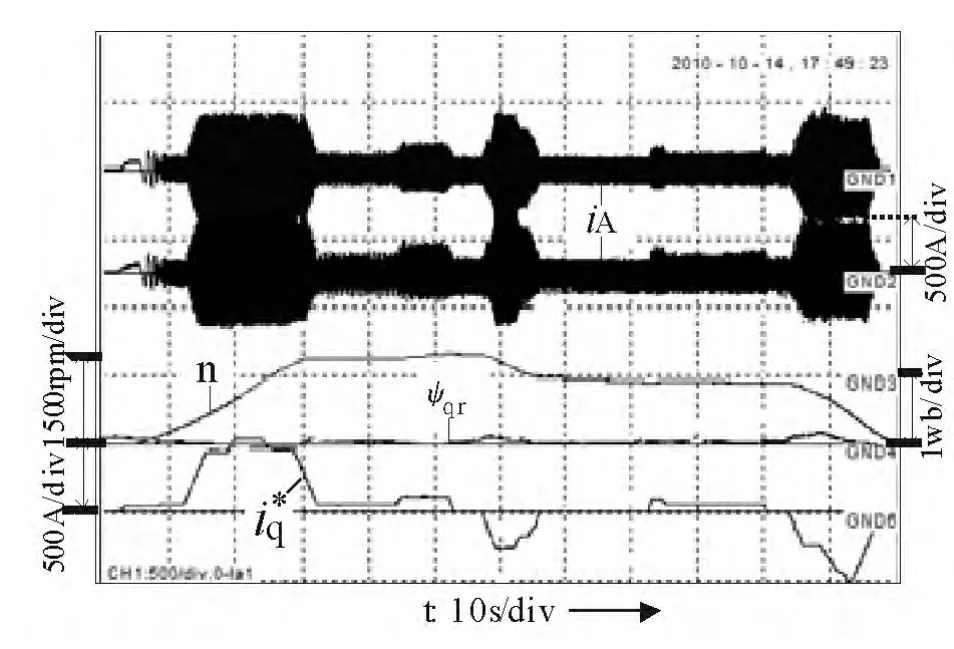
圖8 不同工況下電機控制策略驗證實驗波形Fig.8 Verification experiment waveform of motor control strategies under different working condition
6 結束語
本文主要從牽引變流器的主電路、控制系統和控制策略3方面介紹了面向地鐵車輛牽引電機的車載變流系統設計方案。結合理論計算和仿真模型確定了實際器件的各項參數。采用間接矢量控制策略,獲得了良好的電機動態特性。最后利用仿真和實驗證明了該設計方案的正確性和合理性。
[1]劉小舟,楊正理.地鐵牽引變流器的建模與仿真[J].中國電子商務,2012,(18):201-203.LIU Xiao-zhou,YANG Zheng-li.Metro traction converter converter modeling and simulation[J].China's E-Commerce,2012,(18):201-203.
[2]陳廣泰.機車牽引變流器預充電電阻的參數設計與仿真[J].內燃機車,2009,(12):18-20.CHEN Guang-tai.The parameter design and simulation of the pre-charge resistance in the locomotive traction inverter[J].DIesel Locomotives,2009,(12):18-20.
[3]王彬,裴冰,馬連鳳.大功率牽引變流器用預充電電阻的仿真計算分析[J].鐵道技術監督,2010,38(6):40-43.WANGBin,PEIBing,MALian-feng.Thesimulation calculation analysis for pre-charge resistance of high power traction converter[J].Railway Quality Control,2010,38(6):40-43.
[4]劉志剛.電力電子學[M].北京:清華大學出版社,2004.
[5]陳湘令.HXD 1型機車變流技術與應用器中的直流支撐電容[J].電氣技術,2011(12):77-79.CHEN Xiang-ling.Discussion on type HXD1 locomotive converter DC capacitor support[J].Electrical Engineering,2011(12):77-79.
[6]仝鑫.管軌運輸系統直線電機牽引變流器研究[D].北京:北京交通大學,2011.
[7]Bimal K.Bose著.王聰等譯.現代電力電子學與交流傳動[M].北京:機械工業出版社,2005.
[8]朱文渝,姚婭川.基于Matlab的異步電動機間接矢量控制系統研究[J].磁性材料及器件,2010(5):67-75.ZHU Wen-yu,YAO Ya-chuan.Research on indirect vector control system of asynchronous motor based on matlab[J].Journal of Magnetic Materials and Devices,2010(5):67-75.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
