無人直升機控制平臺研究
2015-01-15 03:07:54李捍東張文征
現代機械 2015年1期
高 虹,李捍東,張文征
(貴州大學電氣工程學院,貴州 貴陽 550025)
0 引言
無人直升機具有獨特的飛行性能,兼有無人機與直升機[1]的共同優點,具有重要的軍事和民用價值。在控制上,無人直升機是一多自由度、多變量和強耦合[2]的系統。要使其具有好的飛行性能,關鍵是需要好的飛行控制算法和高性能的控制器。其飛行控制算法、管理任務及自主導航能力是無人直升機完成起飛、飛行、執行預定任務、降落回收等整個飛行過程的核心。本設計采用航模直升飛機作為機械平臺,具有較好的可操縱性和負載能力。本文提出了一種基于ARM(控制計算)的飛行方案,系統通過采集并計算姿態傳感器數據、GPS位置以及目標信息并且經ARM處理器處理得到飛機的控制方案,滿足了設計的要求,提高該系統的可靠性。
1 飛機控制系統的總體設計
本文所研究的直升機飛行控制系統,其硬件部分系統主要包括:小型單旋翼無人直升機模型,ARM主控器,機載姿態傳感器,GPS傳感器等。眾多傳感器在飛行平臺上組成了慣導系統[3],通過RFID無線技術為基站服務器提供無人直升機飛行過程中所有的飛行狀態和導航信息,包括姿態角、航向角、三軸角速率、三軸線速度、線加速度、飛行位置等信息。接收系統通過串口和下位機相連接;用于和地面測控系統進行無線鏈路通訊。它接收地面測控系統的控制指令進行自動飛行以及機載工作設備的管理和控制等。而地面測控系統通過以太網接收無人機上的各種遙測信息、系統狀態數據、任務工作設備的狀態數據等。在系統調試階段利用遙控器共同完成無人直升機的手動模式飛行。
2 飛機硬件控制系統
無人機飛行控制系統是一種以導航計算機和控制計算機為中心,并包括各種傳感器及執行機構的閉環控制系統.硬件部分主要由控制器、三軸加速度計、三軸角速率陀螺儀、空速計、氣壓高度計、GPS模塊、無線傳輸模塊及各種舵機等組成。根據系統的設計要求,采用現有的ARM 32位CortexTM‐M3 CPU微處理器完成導航計算機和控制計算機的任務,由于采用更高端的處理器會增加成本,體積,功耗等,因此本系統設計了一種模塊化、功耗小、體積小、成本低的控制系統[4]。設計的導航計算機和控制計算機不僅能夠完成現行任務,而且還有很多資源沒有運用,便于拓展功能。無人機飛行控制系統硬件框圖如圖1所示。
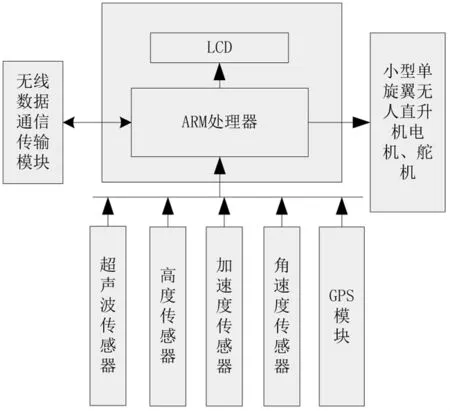
圖1 無人機平臺硬件框圖
2.1 三軸傳感器介紹
本設計采用的是MPU-6000加速度陀螺儀,該加速度計具有低成本、低功耗、耐沖擊性強和靈敏度高等優點,加速度的檢測分辨率高;響應速度快。陀螺儀采用了BGA封裝,5 V電壓的功耗為5 mW;該產品在機械振動0~2 kg的范圍內都能進行穩定的輸出。圖2所示為MPU-6000的硬件連接圖。
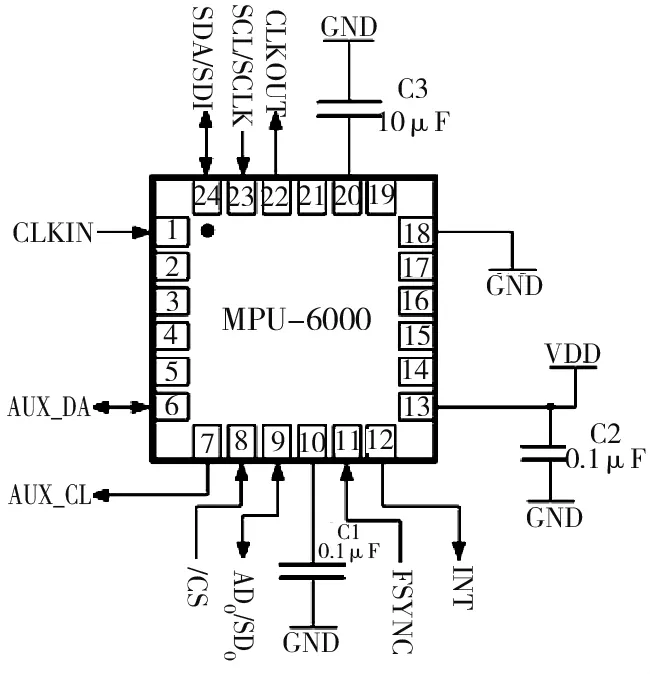
圖2 MPU-6000連接圖
2.2 GPS傳感器介紹
GPS 定位系統用于實時檢測無人機的飛行時間,速度,位置信息,本系統中采用的GPS接收機數據更新頻率為5 Hz,通信協議為SPI協議,波特率為38 400 bps。
2.3 主控制器STM32F103VET6
無人機控制系統的主控制器芯片為基于ARM32位CortexTM‐ M3 CPU 的 STM32F103VET6,該芯片擁有2個I2C接口(支持SMBus/PMBus協議)用于姿態監測模塊(支持加速度 +陀螺儀MPU6050、磁力計HMC5883、氣壓計BMP180)信號的輸入接口,并具有多達5個USART接口(支持ISO7816,LIN,IrDA接口和調制解調控制)可用于GPS等模塊,以太網通訊連接器,GPRS模塊的接口等等,主頻可達72 MHz,為直升機姿態解算及控制提供硬件支持。
3 系統軟件設計
3.1 軟件總體設計
在無人直升機系統運行過程中,需要對直升機機身上各個傳感器進行綜合分析、處理,擬合出直升機的三軸實時姿態,并根據算法進行姿態控制。在實際操作過程中,由于目前可以測量物體角度的傳感器有以測量重力的加速度計及測量角速度的陀螺儀等,這些傳感器在測量動態物體時會出現漂移的現象,無法準確測量直升機的姿態信息,因此,在本次設計中采用四元數算法[5]將加速度計、陀螺儀等傳感器數據擬合計算出直升機三軸姿態,并以此為依據對直升機進行控制,使其平穩飛行。軟件設計流程如圖3所示。
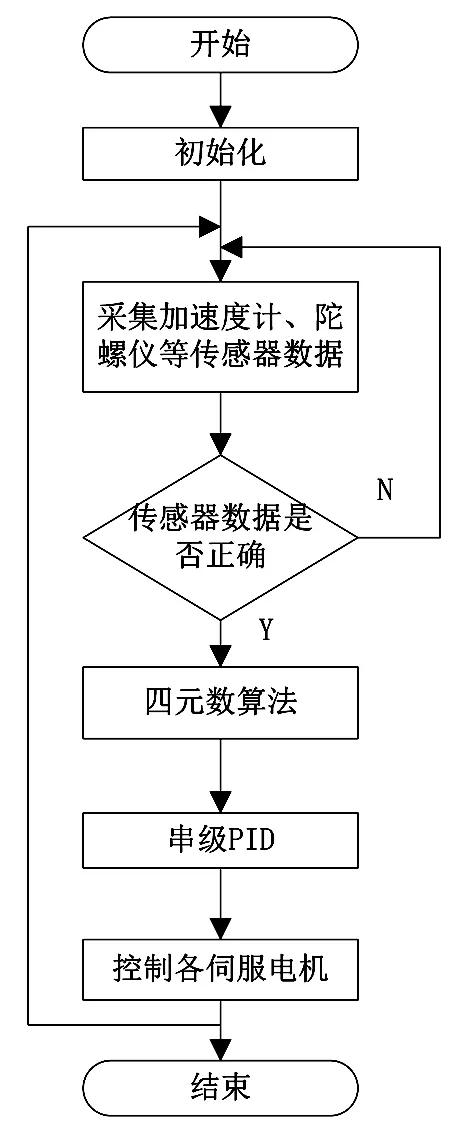
圖3 軟件設計流程圖
3.2 四元數算法
在直升機模型飛行過程中,由于傳感器自身的精度及機身本身會有劇烈震動,開環累計加速度或陀螺儀值無法精確反映出直升機當前姿態,因此,采用四元數算法閉環實時修正檢測傾角,保證得到的姿態角度實時、準確。
3.3 串級PID
本設計由于在調試過程中應用PID算法發現平臺對參數確實十分敏感,很難達到穩定的效果,經研究發現若將直升機模型簡化為一個低阻尼二階系統,角速率反饋可以增加其阻尼。本設計最終采用串級PID控制無人機舵機,一層是角度環,另一層是角速度環,得到理想的效果。圖5所示為串級PID控制算法流程圖。
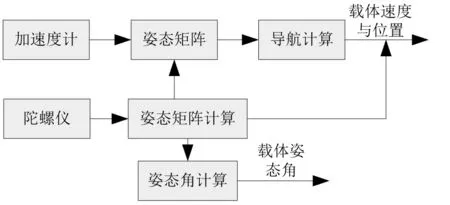
圖4 閉環修正傾角原理圖
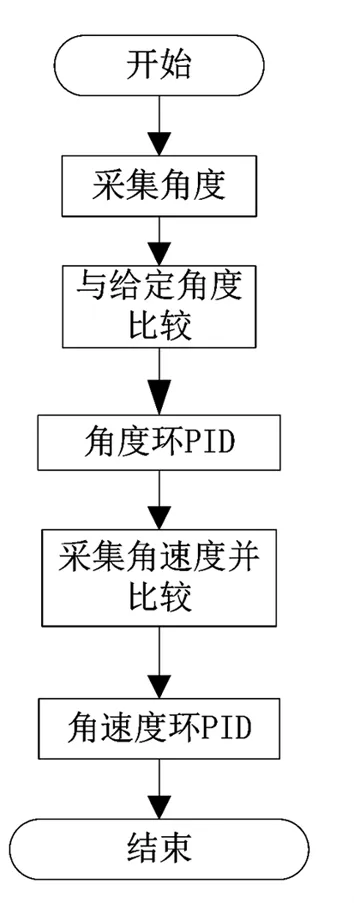
圖5 串級PID控制算法流程圖
4 結論
無人駕駛的直升機是機器人技術,電子技術,傳感器技術發展的產物,也是現階段研究的熱點,具有廣大的發展前景和研究價值。經過地面調試和動態實驗,本文設計的無人機數據采集系統工作正常,滿足飛行設計要求,采用本設計方案的[7]無人機飛控系統在實時性,高精度,小型化,高可靠性等方面均滿足設計要求,并且具有功能全面,通用性好,成本低,功耗小,集控制系統與采集系統于一體等特點。
[1] 吳少琴.接收功率受限下的信道容量研究[J].電訊技術,2012,1(52):86-89
[2] 陳來九.熱工過程自動調節原理和應用[M].北京:水利電力出版社,1982
[3] 劉棟煉.無人機飛控系統硬件設計與數據融合算法研究[D].華南理工大學自動化科學與工程學院,2009.5
[4] 徐愛鈞.IAR EWARM嵌入式系統編程與實踐[M].北京航空航天大學出版社,2006
[5] 常銳.小型自主無人直升飛機軟件系統設計與實現[D].華南理工大學自動化科學與工程學院,2007.5
[6] 王凌,宋揚,李國林,張穎.基于有限狀態機的飛行器自毀系統時序控制設計[J].現代電子技術,2009(8):1-3
[7] 呂印新,肖前貴,胡壽松.基于四元數互補濾波的無人機姿態解算燕山大學學報,2014.2
[8] 蔡偉峰.無人直升機視覺導航系統的分析與設計[D].華南理工大學自動化科學與工程學院,2010.5
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17