多自由度運動電機永磁轉子位置實時檢測系統
2015-01-13 10:09:42郭曼潔
微特電機 2015年4期
李 爭,馬 駿,郭曼潔
(河北科技大學,石家莊050018)
0 引 言
隨著現代科學技術和機械技術的迅速發展,三自由度的運動裝置越來越普遍地應用于制造業、造船業、服務行業等多個領域,復雜的機械關節裝置對電機的精密度和穩定性能的要求不斷提高,而以前的這種裝置需要由多個單自由度電機和復雜的機械結構組成,結構復雜,穩定性較差,由此推動了高精度、高效率、結構較為簡單的多自由度電機的發展[1,2]。多自由度電機的研究最早始于上世紀50年代初期,英國F. C. WilIiams 及Laithwaite 等人研制出一種定、轉子都可動的變速球形感應電動機,改進了電動機的調速性能。隨后,美日英法德等國家的一些著名大學和研究所也相繼參與了多自由度電機的研究。土耳其帕慕克卡萊大學的學者在2007年提出一種永磁轉子球形多自由度電機,該電機不僅可完成連續的自轉,還能實現繞傾斜軸±45°的偏轉運動[3]。2008 年,新加坡南洋理工大學機械與航空工程學院合作研究設計出一種永磁球形直流電動機,此電機可以實現多個方向的復雜運動[4]。隨著對多自由度電機研究的不斷深入,三自由度運動裝置的精度和穩定性也不斷提高,體積也不斷減小。
對多自由度電機轉子的位置檢測是實現電機運動控制必不可少的環節。1991 年Kok-Meng Lee等人設計了滑軌支架測量系統[5];1999 年美國約翰霍普金斯大學設計了二值球形運動編碼器,通過光電傳感器來檢測轉子的位置[6];2001 年Harry Garner 和Kok-M eng Lee 等人提出視覺傳感器獲取轉子表面圖像來確定電機轉子位置[7];2004 年北京航空航天大學寇金橋等人提出基于微處理器的光學傳感器測量系統,這種方法在檢測過程中傳感器不需要與電機轉子表面相接觸,從而實現了非接觸式位移測量[8]。近年來,隨著對三自由度電機精度要求的不斷提高,國內外學者們也越來越重視用于傳感器的選擇和檢測裝置的設計。目前,常用傳感器主要有霍爾傳感器、旋轉變壓器、光電編碼器以及視覺傳感器,而其中霍爾傳感器具有功耗小、效率高及使用壽命長等優點,應用場合比較多。傳感器位置檢測的方法可以分為非接觸式和接觸式檢測,而用接觸式的方法檢測轉子位置時會引入摩擦力導致精度下降,所以在精度要求比較高時,采用非接觸式的檢測方式比較好。
本文是在系統分析了國內外對三自由度電機位置檢測研究的基礎上,提出了一種新結構永磁轉子偏轉式三自由度運動電機的非接觸式位置檢測的方法,同時通過設計采樣檢測電路、進行軟件仿真、搭建實驗平臺來驗證結果的正確性。
1 永磁轉子偏轉式三自由度運動電機位置檢測平臺的設計
1.1 永磁轉子偏轉式三自由度運動電機工作原理
本文研究的多自由度電機是永磁轉子偏轉式三自由度運動電機,其結構如圖1 所示。電機的定子線圈分上下兩層,共12 個。通過給定子線圈通入不同方向的電流,使同一組線圈產生不同的磁極,從而使轉子發生偏轉[9]。如圖2 所示,通過給轉子S 極對應的定子線圈通入不同方向的電流,使其和轉子的S 極相互作用,從而使轉子在一個方向上偏轉。設定的電機線圈標號如圖1 所示。例如,給2 和5'線圈加載直流電,使其產生磁極為N 極,給2'和5 線圈加載電流,使其產生磁極為S 極。根據磁極的作用原理,使得永磁轉子繞X 坐標軸做偏轉運動。圖2 為電機繞X 坐標軸偏轉運動時的截面示意圖。
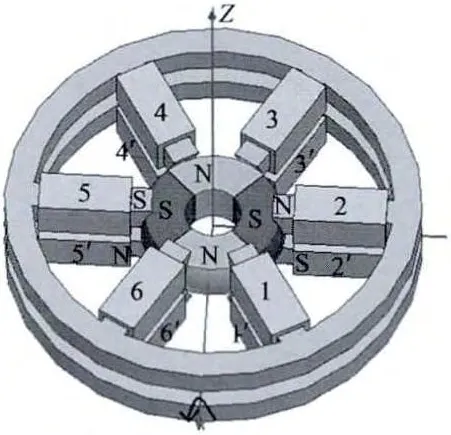
圖1 偏轉式三自由度永磁電機結構
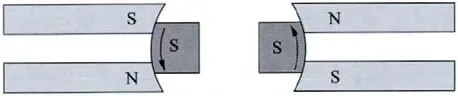
圖2 電磁鐵使轉子轉動
同理,通過給轉子N 極對應的定子線圈通入不同方向電流,可以使轉子在另一個方向上發生偏轉。設計電流控制策略,根據永磁轉子磁極位置的不同,給對應的定子線圈通入相應的電流,可以使永磁轉子連續自轉,這樣就實現了永磁轉子在三個方向的運動。但是由于永磁轉子偏轉式三自由度電機結構的限制,電機轉子只能在一定的角度范圍內繞X 和Y 軸的偏轉[10]。通過改變電機線圈通電電流的方向,可以實現電機反方向的運動。
1.2 電機轉子位置檢測算法
霍爾傳感器用于檢測磁場的大小,要對轉子的位置進行檢測,首先要建立起轉子位置和磁場的關系,通過建立雙極子模型的方法可以確定磁體位置和磁場的關系,轉子位置通過傾角表示,磁場大小通過霍爾傳感器檢測的電壓表示,四個霍爾傳感器分別放置在固定在與輸出軸平行的上方。如圖3 所示,S1、S2、S3、S4四個傳感器分別放置在[± S,0,h],[0,±S,h],通過一條直線上的兩個傳感器檢測圓柱體該方向的偏轉角度,即通過S1和S2傳感器測量出來的數據計算轉子在X 軸方向的偏轉角度,通過S3和S2傳感器檢測的數據計算轉子在Y 軸方向的偏轉角度。
圖4 為基于DMP 模型的傳感器位置檢測方法原理圖。該方法的原理為通過測量一個在空間做旋轉運動的永磁體的磁場來確定傾斜軸的位置取向q(α,β),采用低成本的霍爾傳感器安裝在永磁體的周圍用來獲得磁場信息。通過多項式逼近法建模得出的磁場反解出兩對傳感器的實時位置q(α,β)。

圖3 霍爾傳感器固定的位置
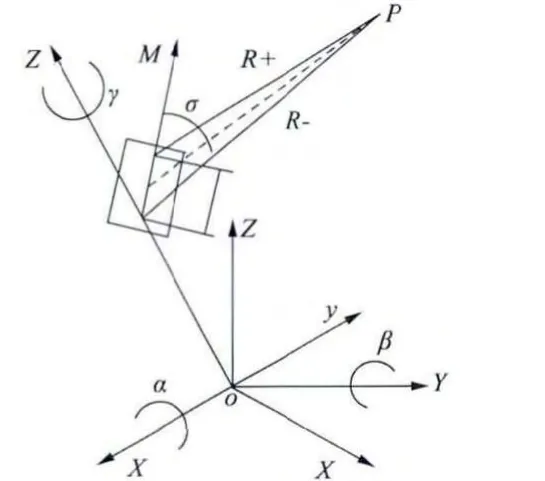
圖4 傾斜角測量原理圖
一般情況下,一個旋轉永磁體的磁通密度B 可以近似為以下n 階多項式的形式[10]:

式中:下標m 表示第m 個傳感器;n 為近似的階數。對所定義的傳感器對,有:對于BX±,N1= N2= cos α,S1=-S2=sin β;對于BY±,N3=N4=cos β,S3=-S4=sin α。
應用最小二乘法,式(1)的系數cij可以通過最小化總和平方誤差來獲得:

式中:Bm(α,β)是磁場在該點處所得的分析解。
磁場B^建模完成,位置(α,β)就可以通過解逆問題得到,它的解的精度取決于近似的階數n。一般來說,對于每個傳感器對都可以得到以下兩個方程:
式(3)中i=2,4 ,式(4)中i=1,3。

式中:W1和W2分別為已知傳感器對的2 ×2 權重矩陣,對于定義的傳感器對,因為每對沿x 軸的傳感器相對于沿y 軸是獨立的,因此權重矩陣可以選擇:
1.3 轉子位置檢測實驗平臺的建立
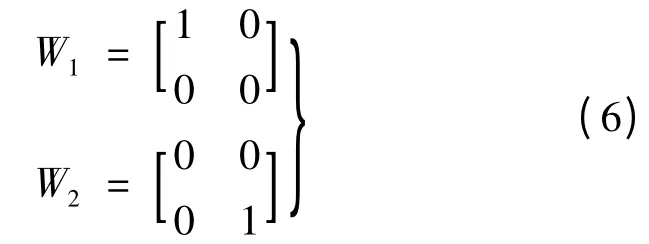
本檢測系統首先通過檢測采樣電路將傳感器檢測的轉子磁場信號送入單片機處理,單片機將接收到的模擬信號通過A/D 轉換模塊轉換成數字信號,在通過串口模塊的電平轉換功能將信號送入上位機進行運算處理[11-13],流程圖如圖5 所示。
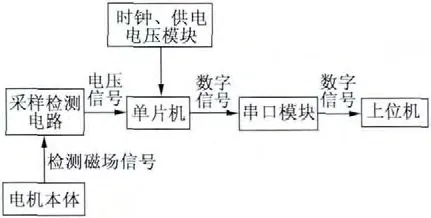
圖5 電機轉子位置檢測系統流程圖
Visual Basic 6.0 是目前廣泛應用的面向對象的開發工具,為用戶提供了大量的控件,可用于實現各種功能。VB 制作上位機界面簡單、容易上手,而MATLAB 具有強大的數據處理能力,將這兩者的優勢相結合,具有一定的現實意義。實現VB 與MATLAB 相結合,有四種方法[14]:①ActiveX 自動化服務技術;②動態數據交換(DDE);③動態鏈接庫(DLL);④MatrixVB。這幾種方法的調用實現較為復雜,而且無法完全脫離MATLAB 環境,影響開發軟件的獨立運行和發布。在MATLAB 6.5 及以后版本中,增加了MATLAB COM Builder 模塊,將M 函數文件轉化為可供其他程序調用的COM 組件。這種方法在VB 訪問該COM 組件時,無需進行環境切換。同時,在沒有安裝MATLAB 的電腦上運行所開發的程序時,也能成功實現。本文所設計的界面主要實現的功能有:實時角度曲線的繪制、實時數據顯示、歷史數據顯示和用于直觀顯示轉子位置的虛擬三維轉子圖。
由于永磁轉子偏轉式三自由度電機本身轉子運動復雜,運動方向多樣化,同時要求對轉子的位置進行實時檢測,故對檢測系統檢測速度和精度均有較高的要求。檢測系統中的下位機檢測采樣是以STM32F103RCT6 單片機為核心,根據固定的四個霍爾傳感器輸出的數據,通過算法編程綜合處理成位置檢測信號,并最終計算出永磁轉子的實時位置。本實驗采用的STM32F103RCT6 單片機使用高性能的ARM Cortex M3 32 位的RISC 內核,內置高速儲存器,增強I/O 端口,同時包含2 個12 位的ADC、3個通用16 位定時器和一個PWM 定時器,可以滿足本檢測系統的要求。單片機將霍爾傳感器檢測電壓信號通過AD 轉換與上位機進行通訊。硬件檢測電路將霍爾傳感器的電壓信號傳送到上位機,實現與上位機的通訊。圖6 為上位機與下位機通訊時的硬件連接圖和霍爾傳感器檢測電路實物圖。
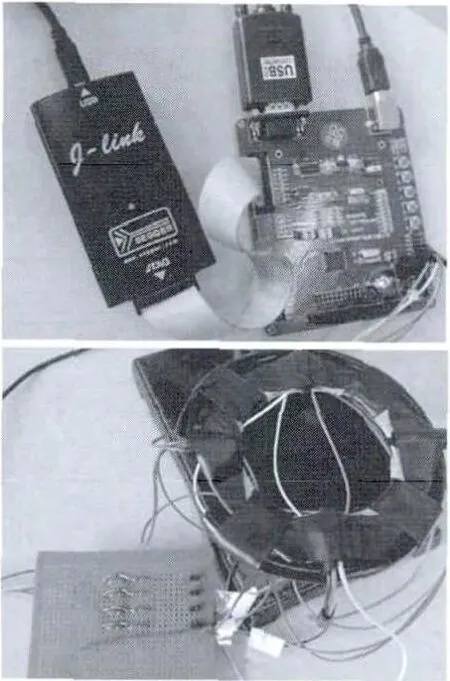
圖6 硬件連接電路和霍爾傳感器檢測電路實物圖
串口模塊可以實現單片機與上位機之間的通訊,通過芯片SP3232 的電平轉換將單片機的UART模塊和上位機的串口相連接。霍爾傳感器采樣電路中,采用的霍爾傳感器的型號為SS495A,該傳感器具有體積小巧、線性輸出、靈敏度高、高精度的特點,可以實現高精度的位置檢測。
基于以上各個部分,連接上下位機和傳感器檢測部分,建立的采樣檢測系統實驗平臺如圖7 所示。
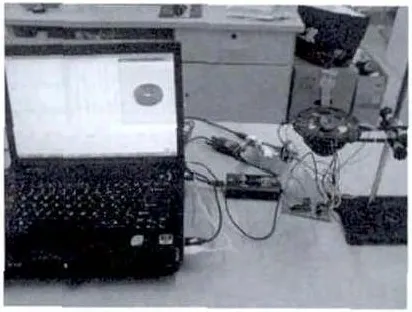
圖7 采樣檢測系統實驗平臺
2 實驗結果與分析
在前述算法和搭建的實驗平臺的基礎上,對轉子實時位置進行了實驗研究。檢測系統硬件電路連接完成后,將采樣程序下載到單片機中。上位機界面是用于對傳感器檢測信號和轉子偏轉角度的實時顯示,可以通過VB 編程來實現。上位機界面可以將下位機(即單片機)通過串口傳送到PC 機的電壓信號通過計算轉換成X 和Y 軸的偏轉角度,分別用α 和β 表示X 和Y 軸方向的偏轉弧度。如圖8 所示,所開發的上位機界面可以顯示當轉子的偏轉角度。當轉子在β 方向沿一定角度轉動時,S1,S2,S3,S4分別為四個霍爾傳感器的輸出電壓,α,β 分別為兩個方向的傾斜弧度。
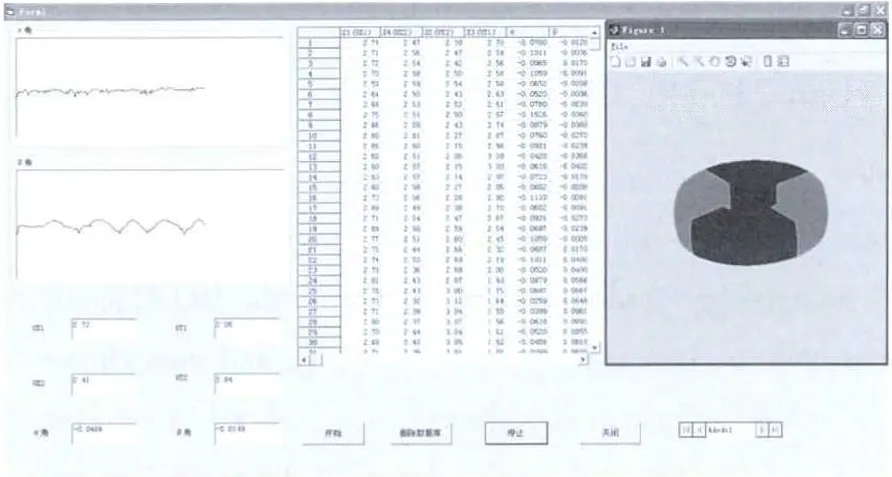
圖8 上位機數據和偏轉角變化顯示界面
圖8 左半部分為轉子沿β 方向轉動時上位機的輸出曲線。由圖8 可知,當轉子在β 方向±40°來回偏轉時,α 基本不變,β 在±40°之間上下波動。圖9為當永磁轉子在α 方向±40°來回偏轉時,實驗裝置檢測得到的數據曲線。將數據與轉子運動標準數據進行對比,可以驗證數據的一致性,從而驗證了所提出方案的可行性。
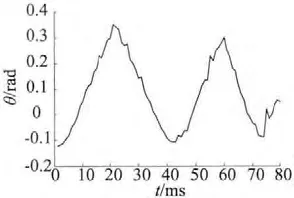
圖9 檢測數據曲線
3 結 語
本文介紹一種新型的永磁轉子偏轉式三自由度電機的檢測方法,為了實現對永磁轉子的位置檢測,設計了一種以STM32F103RCT6 單片機為核心適于小型化的檢測系統,并建立三自由度電機轉子位置檢測的實驗平臺。通過單片機把多個霍爾傳感器檢測的磁場信號轉換成上位機可以接收的數字信號,再通過上位機的計算處理,得到轉子具體的偏轉角度。經過具體實驗的測試,證實了此檢測系統具有較高的實際應用價值。
[1] 李爭,王群京.永磁多維球形電動機的研究與發展現狀[J].微特電機,2006,34(10):7-11.
[2] 王群京,錢喆,郭中醒.三維球形電動機位置檢測的研究與發展[J].微特電機,2009,37(12):65-69.
[3] ONER Y.A permanent magnet spherical rotor design and three dimensional static magnetic analysis[J]. Sensors and Actuators A:Physical,2007,137:200-208.
[4] YAN Liang,CHEN I-Ming,LIM Chee Kian.Design and analysis of a permanent magnet spherical actuator[J].IEEE/ASME Transactions on Mechatronics,2008,13(2):239-248.
[5] LEE K-M,PEI J. Kinematic analysis of a three degrees of freedom spherical wrist actuator[C]//Proceedings of the Fifth International Conference on Advanced Robotics,1991:72-77.
[6] CHIRIKJIAN G S,STEIN D.Kinematic design and commutation of a spherical stepper motor[J]. IEEE Trans. on Mechatronics,1999,4(4):342-353.
[7] GARNER H,KLEMENT M,LEE Kok-Meng.Design and analysis of an absolute non-contact orientation sensor for wrist motion control[C]//Proc. of IEEE/ASME Int.Conf.on Advanced Intelligent Mechatronics,2001:69-74.
[8] KOU J,CHEN W,YU S,et al. Orientation sensing of a 3-DOF spherical motor[J]. Journal of Beijing University of Aeronautics and Astronautics. 2005,31(7):23-28.
[9] Zheng Li.Analysis and control of novel deflection-type PM multi- DOF actuator[J]. Journal of Harbin Institute of Technology(New Series),2013,20(2):99-105.
[10] 李爭,郭智虎,張玥.新型永磁轉子偏轉式三自由度電機磁場特性分析[J].河北科技大學學報,2012,33(5):422-428.
[11] 林游,張俊杰,易凡. 霍爾傳感器信號采集與顯示系統設計[J].現代電子技術,2009,32(4):191-194.
[12] 劉艷玲.采用MAX232 實現MCS-51 單片機與PC 機的通信[J].天津理工學院學報,1999,15(2):60-64.
[13] 席東河,馬磊娟,杜娟. 單片機串口通信的調試方法與技術[J].武漢職業技術學院學報,2010,9(3):75-78.
[14] 劉晉,任偲.完善機電一體化系統-上位機人機界面的編制[J].制造技術與機床,2002(11):58-60.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
海峽科技與產業(2016年3期)2016-05-17 04:32:12