一種低成本徑-軸向集成化主動磁軸承
2015-01-13 10:12:10黃松柏
微特電機 2015年10期
黃松柏
(湖北理工學(xué)院,黃石435003)
0 引 言
由于應(yīng)用的需要,特別是轉(zhuǎn)子的臨界轉(zhuǎn)速的條件,主軸的軸向長度受到了限制。因此,開發(fā)一種集成化的徑-軸向磁軸承[1-3]的目的就是將轉(zhuǎn)子的有效長度減小。圖1 顯示了有兩個徑向和一個軸向磁軸承的傳統(tǒng)設(shè)計與有一個徑-軸向和一個徑向磁軸承的新型設(shè)計的比較。通過集成徑向和軸向磁軸承可以節(jié)省很多的空間。對于相同的承載力,傳統(tǒng)設(shè)計需要新型設(shè)計的兩倍的空間。為了降低成本,采用轉(zhuǎn)子非迭片結(jié)構(gòu)的同極型磁軸承。此外,可以將輔助軸承集成到系統(tǒng)里面去。
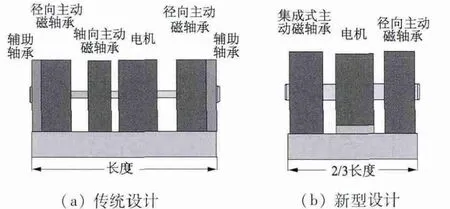
圖1 傳統(tǒng)設(shè)計與新型設(shè)計的比較
1 機械設(shè)計
設(shè)計的新型磁軸承機械結(jié)構(gòu)圖如圖2 所示。徑向磁軸承和軸向磁軸承集成為一個整體;T 型軸向圓盤的側(cè)面作為磁軸承的轉(zhuǎn)子鐵心;徑向異極型磁軸承有四個磁極。可以放置線圈的疊壓式槽,由標(biāo)準(zhǔn)的E 型錫片構(gòu)成;軸向線圈繞制成環(huán)型;主軸是非迭片式結(jié)構(gòu)。
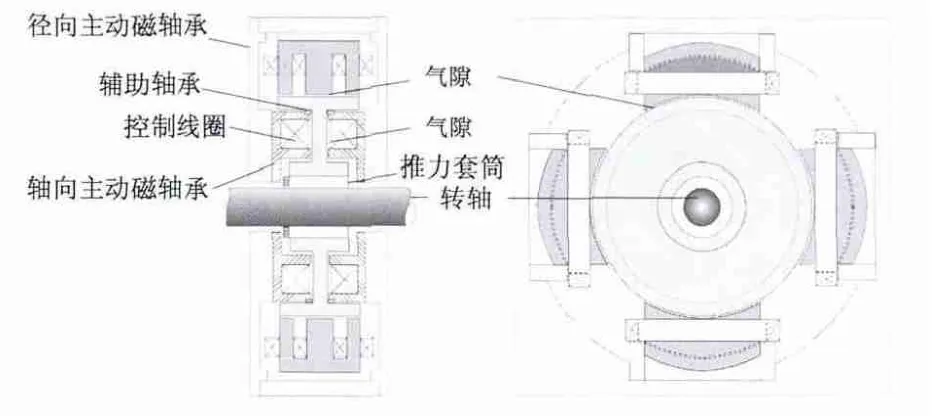
圖2 徑向-軸向磁軸承的機械結(jié)構(gòu)圖
通過使用銅環(huán)將徑向和軸向輔助軸承固定到T型圓盤上,用推力套筒將軸承安放到主軸上。該磁軸承的主要結(jié)構(gòu)參數(shù),如表1 所示。

表1 徑向軸向磁軸承的特征參數(shù)

續(xù) 表
2 磁軸承特性
采用這種安裝結(jié)構(gòu),可以減小磁軸承所需的空間,因此,本文提出的新型磁軸承可以作為一種結(jié)構(gòu)緊湊的磁軸承。在高轉(zhuǎn)速下,減小轉(zhuǎn)子的長度有利于轉(zhuǎn)子的動態(tài)特性。在相同的負(fù)載條件下,由于是T 型軸向圓盤,增加磁極面積可能會使得線圈電流減小和安匝數(shù)減少。
和異極型磁軸承相比,同極型磁軸承的功耗相對小很多,而且磁滯損耗也很小[4]。因此,這種磁軸承最適合用于高轉(zhuǎn)速的場合。不采用轉(zhuǎn)子迭片式結(jié)構(gòu),能夠很大程度上降低產(chǎn)品的成本。同時,由于采用剛性主軸結(jié)構(gòu),可以使其應(yīng)用于高轉(zhuǎn)速場合。徑向的轉(zhuǎn)動慣量會因圓盤狀而增加,因此這種設(shè)計尤其適合應(yīng)用于飛輪儲能系統(tǒng)[5]。
3 實驗裝置MBZ120
這種結(jié)構(gòu)緊湊的徑-軸向磁軸承被集成在實驗裝置MBZ120 里。圖3 顯示了實驗裝置的零件拆分圖,另一徑向磁軸承也設(shè)計成同極型的,有4 個磁極,同時還配有輔助軸承。轉(zhuǎn)子重達(dá)2.7 kg,長約250 mm。由于是在變換的位移條件下進(jìn)行測試,軸的直徑是20 mm。徑向磁軸承的氣隙長度和徑-軸向磁軸承的徑向氣隙長度一樣。徑向承載力達(dá)到28 N。
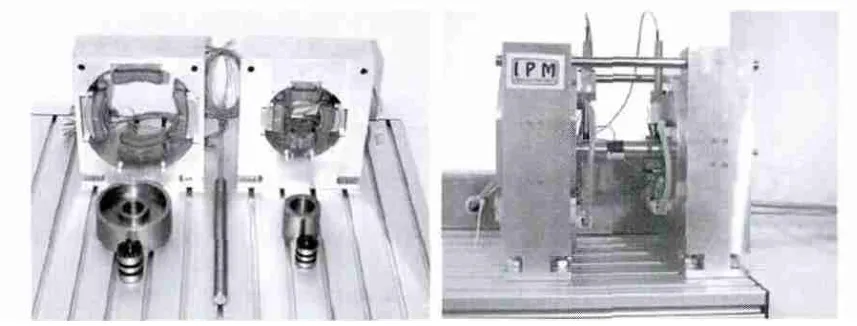
圖3 實驗裝置MBZ120
信號處理單元的主要結(jié)構(gòu)以及控制回路如圖4所示。對于每個磁軸承,每個自由度均存在控制回路(分散控制)。轉(zhuǎn)子的徑向位移采用電渦流傳感器測量。采集到的位移信號經(jīng)過濾波和A/D 轉(zhuǎn)換電路進(jìn)行處理后,再傳送給主控芯片進(jìn)行數(shù)字處理。實驗中控制器采用DSP 控制器芯片。該控制器輸出信號分成兩路相位相反的信號。利用電壓信號來表示對應(yīng)的偏磁電流信號。對于有無變化的偏磁電流,控制器都可以實現(xiàn)這種磁軸承的數(shù)字控制。脈沖的時間調(diào)制(PDM)之后,就可以控制驅(qū)動線圈的功率放大器。該功率放大器的輸入電壓是30 V。最大線圈電流為3 A。

圖4 實驗裝置MBZ120 的控制回路
4 仿真系統(tǒng)
為了適應(yīng)復(fù)雜的算法,如模糊控制,適應(yīng)性控制和非線性補償控制,對快速動態(tài)過程系統(tǒng)做到實時控制,研究開發(fā)了一種高速的矩陣控制器。在仿真系統(tǒng)的幫助下,計算出設(shè)計的過程和最優(yōu)控制算法。這種控制算法變換成一種矩陣形式如圖5 所示。所保存的文件可以下載到硬件里,這種硬件由A/D 和D/A 轉(zhuǎn)換器、地址發(fā)生器、存儲器所構(gòu)成。控制過程的一個周期是200 ns,控制算法的類型和大小都是獨立的。由于在控制過程中無需計算,因此,這種控制器的可靠性得到較大程度上的加強。與傳統(tǒng)的DSP 系統(tǒng)相比,由于沒有處理器的存在,控制器的成本可以大大降低。
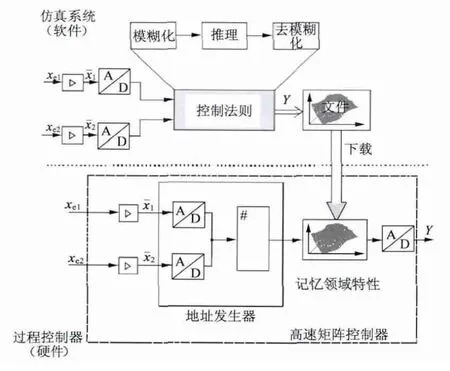
圖5 高速矩陣控制器
5 實驗結(jié)果
5.1 起浮實驗
在起浮試驗時,主軸被從任意位置提升到所設(shè)定的位置。系統(tǒng)可以在最小超調(diào)量和較短起伏時間內(nèi)穩(wěn)定。圖6 顯示了在起浮階段徑-軸向磁軸承的轉(zhuǎn)子關(guān)于X 軸和Y 軸的位置。在X 方向的超調(diào)達(dá)到了75 μm,而在Y 方向由于重力的作用其超調(diào)達(dá)到了125 μm。X 方向穩(wěn)定時間為1.0 s,Y 方向的穩(wěn)定時間為1.5 s。
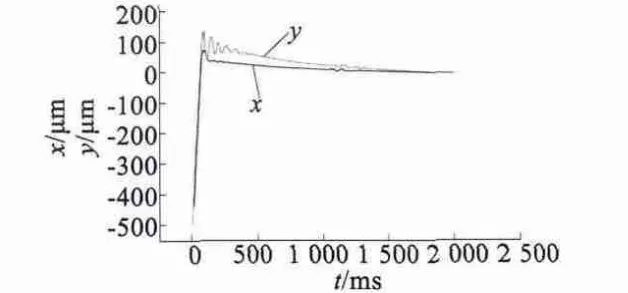
圖6 徑向磁軸承起浮時轉(zhuǎn)子位置曲線
5.2 全速運行實驗
為了測試徑-軸向磁軸承在不同轉(zhuǎn)速下的參數(shù),實驗裝置MBZ120 配有一個外部的磁懸浮驅(qū)動。
圖7 顯示了徑向-軸向磁軸承的轉(zhuǎn)子在X 軸方向幅值。由于受到耦合的限制,可實現(xiàn)最大的轉(zhuǎn)速為12 000 r/min。在臨界轉(zhuǎn)速8 400 r/min 的情況下,最大位移幅值為66 μm。渦流損耗對長時間運行的轉(zhuǎn)子表面的溫度不起作用。
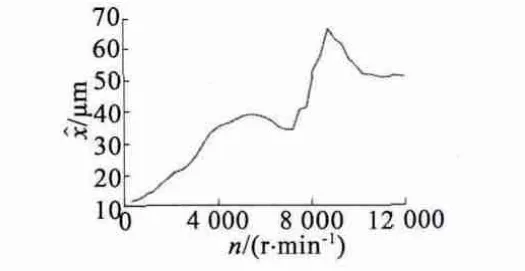
圖7 轉(zhuǎn)子位置幅值與轉(zhuǎn)速的關(guān)系曲線
5.3 負(fù)載測試
通過實驗,測試作用在轉(zhuǎn)子上沿Y 軸負(fù)方向的外部靜態(tài)負(fù)載和變化負(fù)載情況。圖8 顯示了徑向-軸向磁軸承在平衡位置時實驗得到的Y 軸方向的承載力和計算得到的Y 軸方向的承載力與電流的關(guān)系曲線。所測量的承載力超高設(shè)計的承載力,在最大電流情況下,其偏差達(dá)到了10 N。徑向力。轉(zhuǎn)子位置范圍就是輔助軸承的氣隙范圍。對于功率放大器,線圈電流被限定在3 A。在最大氣隙情況下,承載力達(dá)到了25 N。由圖9 可知,該徑向磁軸承在由電流、位移和懸浮力組成的彎曲面數(shù)據(jù)以內(nèi)運行,轉(zhuǎn)子可以實現(xiàn)穩(wěn)定懸浮,且計算的力與所測量的數(shù)據(jù)相吻合。
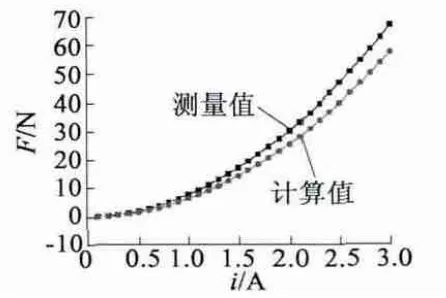
圖8 徑向-軸向磁軸承電流與力的關(guān)系曲線
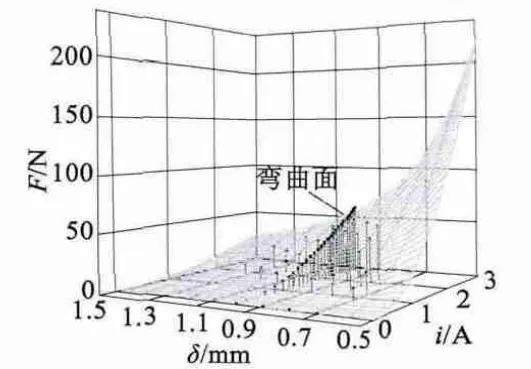
圖9 徑向磁軸承力的特征域
6 結(jié) 語
由試驗可知,在裝有磁懸浮轉(zhuǎn)子的實驗裝置里,本文提出的徑-軸向磁軸承和傳統(tǒng)磁軸承相比具有很大優(yōu)勢,以下是關(guān)于設(shè)計和實驗過程的結(jié)論:
(1)由于低成本的限制,磁軸承的新型設(shè)計方案中,轉(zhuǎn)子是非迭片式結(jié)構(gòu)的。徑向磁軸承僅有4個磁極,且不需要對位置傳感器進(jìn)行測量跟蹤。此外由于緊湊的設(shè)計,這種磁軸承所需的空間明顯減小了。
(2)使用異極型磁軸承能夠降低磁滯損耗,通過增加圓盤的面積,在相同承載的條件下,線圈的電流可以大大減小。因此,也可以降低偏差功耗。
(3)這種磁軸承具有結(jié)構(gòu)緊湊的優(yōu)點,因此尤其適合于高速的場合應(yīng)用,同時由于是圓盤狀,適合用于飛輪儲能的懸浮支承的場合。
[1] 趙旭升,鄧智泉,王曉琳,等.永磁偏置磁軸承的研究現(xiàn)狀及其發(fā)展[J].電工技術(shù)學(xué)報,2009,24(9):9-20.
[2] FANG J C,WANG X,WEI T,et al.Homopolar 2-pole radial permanent-magnet biased magnetic bearing with low rotating loss[J]. IEEE Transactions on Magnetics,2012,48(8):2293-2303.
[3] 朱熀秋,鄧智泉,袁壽其,等.永磁偏置徑向-軸向磁懸浮軸承工作原理和參數(shù)設(shè)計[J].中國電機工程學(xué)報,2002,22(9):54-58.
[4] FANG J C,ZHENG S Q,HAN B C. AMB vibration control for structural resonance of double-gimbal control moment gyro with high-speed magnetically suspended rotor[J]. IEEE/ASME Transactions on Mechatronics,2013,18(1):32-43.
[5] REN Y,F(xiàn)ANG J C. High-stability and fast-response twisting motion control for the magnetically suspended rotor system in a control moment gyro[J].IEEE/ASME Transactions on Mechatronics,2013,18(5):1625-1634.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:41
浙江大學(xué)學(xué)報(工學(xué)版)(2015年2期)2015-05-30 07:04:46
中國艦船研究(2014年6期)2014-05-14 06:45:22
