永磁同步電機(jī)多電機(jī)同步控制策略
2015-01-13 04:30:13金花寧濤
化工自動化及儀表 2015年5期
關(guān)鍵詞:系統(tǒng)
金 花 寧 濤
(大連交通大學(xué)軟件學(xué)院,遼寧 大連 116045)
永磁同步電機(jī)(PMSM)由于轉(zhuǎn)子結(jié)構(gòu)采用永磁體替代了異步電機(jī)勵磁繞組的機(jī)構(gòu),降低了轉(zhuǎn)子的發(fā)熱問題,并且由于永磁同步電機(jī)體積小、功率因數(shù)高、密度高及低速轉(zhuǎn)矩大等優(yōu)勢逐漸被應(yīng)用在需要高速運(yùn)行、負(fù)載變化大和短時工作制的領(lǐng)域,同時使得在PMSM上采用全封閉結(jié)構(gòu)和直驅(qū)控制方式成為了可能。但是由于永磁同步電機(jī)自身結(jié)構(gòu)對同步性的要求,每臺電機(jī)需單獨(dú)配備一套牽引變流器,并且與異步電機(jī)存在轉(zhuǎn)速、轉(zhuǎn)差不同,PMSM對轉(zhuǎn)速同步性要求較高,電機(jī)之間轉(zhuǎn)速差過大會使擦輪嚴(yán)重,如果控制不當(dāng),會降低傳動系統(tǒng)的性能[1~3]。因此,筆者針對以上問題提出一種多電機(jī)同步控制策略。
1 永磁同步電機(jī)簡介①
多電機(jī)同步控制是指系統(tǒng)中的電機(jī)按照相同轉(zhuǎn)速運(yùn)行,并且轉(zhuǎn)速變化是同步的[4,5]。目前多電機(jī)同步控制策略主要有并行控制方式、主從控制方式、虛擬總軸控制方式、交叉耦合控制方式及偏差耦合控制方式[6]等。
PMSM的物理結(jié)構(gòu)如圖1所示。
建立數(shù)學(xué)模型之前,先做如下假設(shè):
a. 忽略鐵心飽和,不計渦流和磁滯損耗;
b. 永磁材料的電導(dǎo)率為零;
c. 轉(zhuǎn)子上沒有阻尼繞組。
相繞組中感應(yīng)電動勢的波形為正弦波。那么基于dq軸旋轉(zhuǎn)坐標(biāo)系下的PMSM的數(shù)學(xué)模型為:
(1)
(2)
(3)
(4)
式中id、iq——d、q軸初級電流;
J——轉(zhuǎn)動慣量;
Ld、Lq——d、q軸初級電感;
p——電機(jī)極對數(shù);
Rs——初級等效電阻;
Te、TL、T0——電磁轉(zhuǎn)矩、負(fù)載轉(zhuǎn)矩和空載轉(zhuǎn)矩;
ud、uq——d、q軸初級電壓;
ψd、ψq——d、q軸初級磁鏈;
ψf——永磁體有效磁鏈;
Ωr——轉(zhuǎn)子機(jī)械角速度。
2 基于單神經(jīng)元偏差耦合多電機(jī)控制
2.1 單神經(jīng)元PID控制器設(shè)計
單神經(jīng)元PID控制器(圖2)具有自學(xué)習(xí)和自適應(yīng)能力,其結(jié)構(gòu)簡單、環(huán)境適應(yīng)能力強(qiáng),并且具有較強(qiáng)的魯棒性,是對傳統(tǒng)PID控制的一種改進(jìn)和優(yōu)化[7],可根據(jù)被控對象參數(shù)變化進(jìn)行自適應(yīng)調(diào)節(jié),在一定程度上解決了控制對象復(fù)雜和參數(shù)慢時變對系統(tǒng)控制上的不足。

圖2 單神經(jīng)元PID控制結(jié)構(gòu)框圖
圖2中,xi(k)(i=1,2,3)為神經(jīng)元的3個輸入量,反映的是期望輸出和系統(tǒng)給定的偏差狀態(tài)。在此,將系統(tǒng)給定設(shè)為y*(k),實際輸出為y(k),兩者的偏差為e(k),x1(k)、x2(k)、x3(k)是偏差e(k)經(jīng)過狀態(tài)變換器,變換成神經(jīng)元學(xué)習(xí)進(jìn)行控制所需要的狀態(tài),性能指標(biāo)為:
(5)
神經(jīng)元PID的輸出信號u(k)為:
(6)
由式(5)可知,xi(k)(i=1,2,3)分別對應(yīng)常規(guī)PID的P項、I項、D項,改變式(6)中的ωi(i=1,2,3)就相當(dāng)于改變P、I、D這3個系數(shù),從而形成具有自學(xué)習(xí)和自調(diào)整能力的神經(jīng)元PID控制器,他們對應(yīng)的權(quán)值分別為ω1(k)、ω2(k)和ω3(k)。筆者采用有監(jiān)督Hebb學(xué)習(xí)算法,其神經(jīng)元的學(xué)習(xí)過程為:
ωi(k+1)=(1-c)ωi(k)+ηri(k)
(7)
ri(k)=z(k)u(k)xi(k)
(8)
式中c——常數(shù),這里取c=0;
ri(k)——遞進(jìn)信號;
z(k)——誤差信號,z(k)=e(k);
η——神經(jīng)元學(xué)習(xí)速率,η>0。
因此可得:
(9)
(10)
(11)
其中K為神經(jīng)元比例系數(shù),K>0;ηP、ηI、ηD分別為比例、積分、微分學(xué)習(xí)速率。綜合考慮多種運(yùn)行狀況將ηP、ηI、ηD和K分別設(shè)定為0.5、0.3、0和0.2,加權(quán)系數(shù)ω1(0)、ω2(0)、ω3(0)分別設(shè)定為0.3、0.3、0.3。
由于單神經(jīng)元學(xué)習(xí)算法不能直接用傳遞函數(shù)加以描述,因此筆者采用S函數(shù)編寫模型。單神經(jīng)元PID控制器仿真模型如圖3所示。
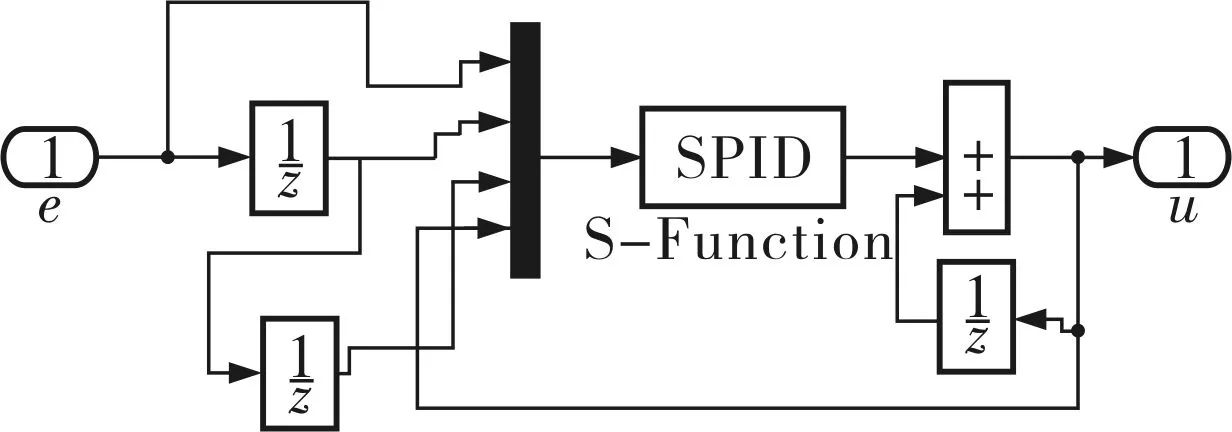
圖3 單神經(jīng)元PID控制器仿真模型
2.2 偏差耦合控制器設(shè)計
電機(jī)同步控制方式中的并行控制方式是將各電機(jī)進(jìn)行并聯(lián),每個電機(jī)接收的指令來自同一指令單元,這種控制方式適用于結(jié)構(gòu)簡單的系統(tǒng),即系統(tǒng)采用同型號的電機(jī),能保持各電機(jī)轉(zhuǎn)速同步,但缺點是相對整個系統(tǒng)該控制方式?jīng)]有檢測各電機(jī)間的轉(zhuǎn)速差值,因此抗擾動能力弱[8]。
主從控制方式是設(shè)定一個主電機(jī),其余電機(jī)轉(zhuǎn)速跟隨主電機(jī)轉(zhuǎn)速進(jìn)行變化,而主電機(jī)不跟隨從電機(jī)進(jìn)行變化,因此這種控制方式適用于電機(jī)有明顯主從關(guān)系的系統(tǒng)。
交叉耦合控制方式是在并行控制方式的基礎(chǔ)上增加了電機(jī)轉(zhuǎn)速的檢測和反饋。電機(jī)之間的轉(zhuǎn)速跟隨其他電機(jī)轉(zhuǎn)速的變化而變化,但是這種方式經(jīng)過驗證僅適用于兩臺電機(jī)同步控制的場合。
偏差耦合控制方式是在交叉耦合控制方式的基礎(chǔ)上進(jìn)行了改進(jìn),將各個電機(jī)轉(zhuǎn)速反饋值經(jīng)MUX和DEMUX環(huán)節(jié)進(jìn)行整合后,通過轉(zhuǎn)速補(bǔ)償對電機(jī)轉(zhuǎn)速進(jìn)行調(diào)節(jié)(圖4)。筆者利用單神經(jīng)元PID控制器替代傳統(tǒng)轉(zhuǎn)速補(bǔ)償,使其更有效地解決被控對象之間的轉(zhuǎn)速跟隨、過程跟隨及動態(tài)性能匹配等非線性問題,更好地實現(xiàn)了多電機(jī)間的同步控制。

圖4 基于單神經(jīng)元PID的偏差 耦合控制系統(tǒng)框圖
筆者采用3臺永磁同步電機(jī)進(jìn)行同步控制研究,同步控制方式采用偏差耦合控制方法,并用單神經(jīng)元PID控制器代替?zhèn)鹘y(tǒng)轉(zhuǎn)速補(bǔ)償模塊。系統(tǒng)仿真模型為:采集各個電機(jī)轉(zhuǎn)速,經(jīng)單神經(jīng)元PID控制器,將調(diào)節(jié)后的轉(zhuǎn)速誤差信號與給定轉(zhuǎn)速進(jìn)行負(fù)反饋后送入PMSM調(diào)速系統(tǒng)。
3 系統(tǒng)仿真實驗
筆者利用Matlab7建立了永磁同步電機(jī)雙閉環(huán)控制系統(tǒng)模型(圖5),采用有監(jiān)督Hebb學(xué)習(xí)算法的單神經(jīng)元PID控制器,并將其引入到傳統(tǒng)偏差耦合多電機(jī)同步控制中,替代了轉(zhuǎn)速補(bǔ)償模塊。

圖5 單神經(jīng)元PID偏差耦合多 電機(jī)同步控制系統(tǒng)仿真模型
PMSM額定參數(shù)為:額定電壓UN=300V,額定頻率fN=100Hz,定子電阻Rs=0.9585Ω,電感Ld=Lq=5.25mH,轉(zhuǎn)子永磁體磁通ψf=0.1827Wb,電機(jī)極對數(shù)p=4,摩擦因子F=0.0003035N·m·s。3臺電機(jī)轉(zhuǎn)動慣量分別為:0.6329、0.6429、0.6529g·m2。仿真實驗從以下兩個方面來驗證筆者提出方法的合理性。


圖6 3臺電機(jī)的轉(zhuǎn)速跟隨曲線局部放大曲線
3臺電機(jī)在t=0.1s時的同步轉(zhuǎn)速誤差曲線如圖7所示。
通過圖6、7可以看出,由于采用具有監(jiān)督Hebb學(xué)習(xí)方法的單神經(jīng)元PID控制器替代傳統(tǒng)轉(zhuǎn)速補(bǔ)償模塊,使得基于改進(jìn)的偏差耦合多電機(jī)同步控制系統(tǒng)具有很強(qiáng)的自調(diào)節(jié)能力,當(dāng)轉(zhuǎn)速突變時,系統(tǒng)超調(diào)小、魯棒性強(qiáng)、電機(jī)間轉(zhuǎn)速很快達(dá)到同步。

圖7 3臺電機(jī)在t=0.1s時的同步轉(zhuǎn)速誤差曲線
突加負(fù)載擾動。電機(jī)以n*=1000r/min空載啟動,當(dāng)t=0.1s時,各電機(jī)突加負(fù)載TL=3N·m;當(dāng)t=0.3s時,各電機(jī)的負(fù)載減少為TL=1N·m。仿真實驗轉(zhuǎn)速波形和局部放大波形如圖8所示。
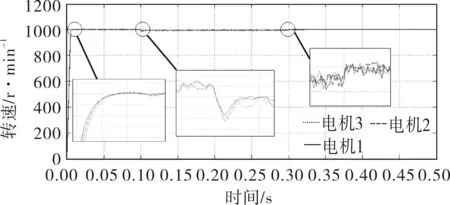
圖8 基于單神經(jīng)元PID偏差耦合同步 控制3臺電機(jī)轉(zhuǎn)速跟隨曲線
從圖8可以看出,當(dāng)電機(jī)給定轉(zhuǎn)速空載啟動時,各個電機(jī)轉(zhuǎn)速基本無超調(diào),跟隨性好。當(dāng)t為0.1、0.3s突然加減負(fù)載擾動時,電機(jī)間調(diào)節(jié)時間短、魯棒性好,很快進(jìn)入同步狀態(tài)。
4 結(jié)論
4.1由于采用有監(jiān)督Hebb學(xué)習(xí)算法的單神經(jīng)元PID控制器,學(xué)習(xí)速率ηP、ηI、ηD取值裕度比較大,而根據(jù)公式可知增益K取值非常重要,取值偏大會增大系統(tǒng)超調(diào),偏小會增加系統(tǒng)響應(yīng)時間。
4.2建立了PMSM單神經(jīng)元PID的偏差耦合控制數(shù)學(xué)模型,利用Matlab7搭建了系統(tǒng)仿真模型,對轉(zhuǎn)速突變和突加、減負(fù)載兩個方面進(jìn)行仿真實驗分析,通過實驗結(jié)果說明有監(jiān)督Hebb學(xué)習(xí)算法的單神經(jīng)元PID運(yùn)用到偏差耦合多電機(jī)同步控制系統(tǒng)中,使系統(tǒng)具有良好的自適應(yīng)能力,能夠有效地減小超調(diào)甚至無超調(diào),提高系統(tǒng)響應(yīng)能力,增加系統(tǒng)的魯棒性,充分驗證了筆者提出基于單神經(jīng)元PID的偏差耦合多電機(jī)同步控制方法的合理性。
[1] 劉金琨.先進(jìn)PID控制MATLAB仿真[M].北京:電子工業(yè)出版社,2004.
[2] 張世韜,楊風(fēng),郝騫.單神經(jīng)元PID控制器研究及仿真[J].機(jī)械工程及自動化,2009,(3):69~70.
[3] 侯勇嚴(yán),郭文強(qiáng).單神經(jīng)元自適應(yīng)PID控制器設(shè)計方法研究[J].微計算機(jī)信息,2005,(12):8~9,17.
[4] Perez-Pinal F J,Caladeron G,Araujo-Vargas I.Relative Coupling Strategy[C].2003 IEEE International Electric Machines and Drives Conference.USA:IEEE,2003:1162~1166.
[5] 王成元,夏加寬,孫宜標(biāo).現(xiàn)代電機(jī)控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2008:128~129.
[6] Miroslav M,Hodder A,Perriard Y.Analysis of the Commutation Currents for a Sinusoidal BLDC Motor[C].2008 International Conference on Electrical Machines and Systems.Wuhan:IEEE,2008: 3016~3019.
[7] 苗新剛,汪芬,韓凌攀,等.基于偏差耦合的多電機(jī)單神經(jīng)元同步控制[J].微電機(jī),2011,44(2):44~47.
[8] 劉坤.多永磁同步電機(jī)同步控制策略的研究[D].長沙:中南大學(xué),2011.
SynchronusControlStrategyforPermanentMagnetSynchronousMulti-motor
JIN Hua, NING Tao
(SchoolofSoftware,DalianJiaotongUniversity,Dalian116045,China)
Considering the characteristics of permanent magnet synchronous motor, the single neuron PID-based deviation coupling synchronization control strategy was proposed and the mathematic model concerned
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
